
激光发射接收装置控制系统设计
2018-10-08 06:43王晋安
火炮发射与控制学报 2018年3期
尤 栋,王 喆,张 敏,王晋安
(西北机电工程研究所,陕西 咸阳 712099)
激光发射接收装置是某火炮系统的一个重要组成部分,该装置与光学系统共同作用,可以完成对海上目标、陆上目标及低空飞行目标的测距。
激光发射接收装置安装于露天平台上,工作现场和工作环境恶劣。原控制系统由分立电子元器件组成,线路复杂,故障率高,故障定位困难,严重影响了装置的正常使用。基于此,笔者通过借鉴和吸收原控制系统的设计思想,设计了一种新型的控制系统,采用控制电路与PC/104总线工控机[1-3]相结合,实现对激光发射接收装置的控制和与火炮系统的信号匹配。其功能与原系统保持一致,但线路简单,可靠性高,性能指标不低于原系统。
1 组成及控制原理
1.1 组成及功能
激光发射接收装置控制系统由激光电源模块、环境保护盖控制电路、控制装置和主箱体等组成,其中控制装置包括PC/104总线工控机和OCL互补功率放大电路。如图1所示。

1.2 控制原理
激光发射接收装置控制系统的控制原理框图如图2所示。

主要完成以下控制功能:
1)工控机的初始化及自检。激光发射接收装置启动后,完成系统自检,经由串口1发送自检信息给主炮系统。
2)环境保护盖打开。自检完成后,通过操控面板发送“开盖”信号给环境保护盖控制电路,环境保护盖打开;开盖置位后,激光电源模块工作,启动激光器。
3)激光器触发。激光器启动后,工控机通过I/O口输出TTL脉冲触发信号,用以触发激光器;测距完成后,激光器将距离信息经串口2传送给工控机;当进行连续测距时,激光器以2 Hz进行触发。
4)码型转换及数据传输。根据激光测距通讯协议,工控机将十六进制距离信息转换成双阶双极性不归零码;根据主炮系统通讯协议,工控机将包含距离信息的20位双阶双极性不归零码由串口1输出,经OCL互补功率放大电路,发送给主炮系统。
5)自保护功能。 发出“开盖”信号3.5 s后,工控机如未读到“开盖置位”信号,则断开环境保护盖控制电路电源;激光器启动90 s后,如未收到“激光触发”信号,激光器电源自动断电,关闭环境保护盖。
2 控制系统的设计
激光发射接收装置控制系统采用时序控制方式,由软件和硬件两部分共同配合完成。其中软件部分通过PC/104总线工控机来实现,CPU板为LX-3160,信号调理板为OEM-XA-001,系统为DOS 7.1,编程环境为BC31;硬件部分由工控机(含CPU板与信号调理板)、环境保护盖控制电路和OCL互补功率放大电路三部分组成。
2.1 控制系统工作流程图
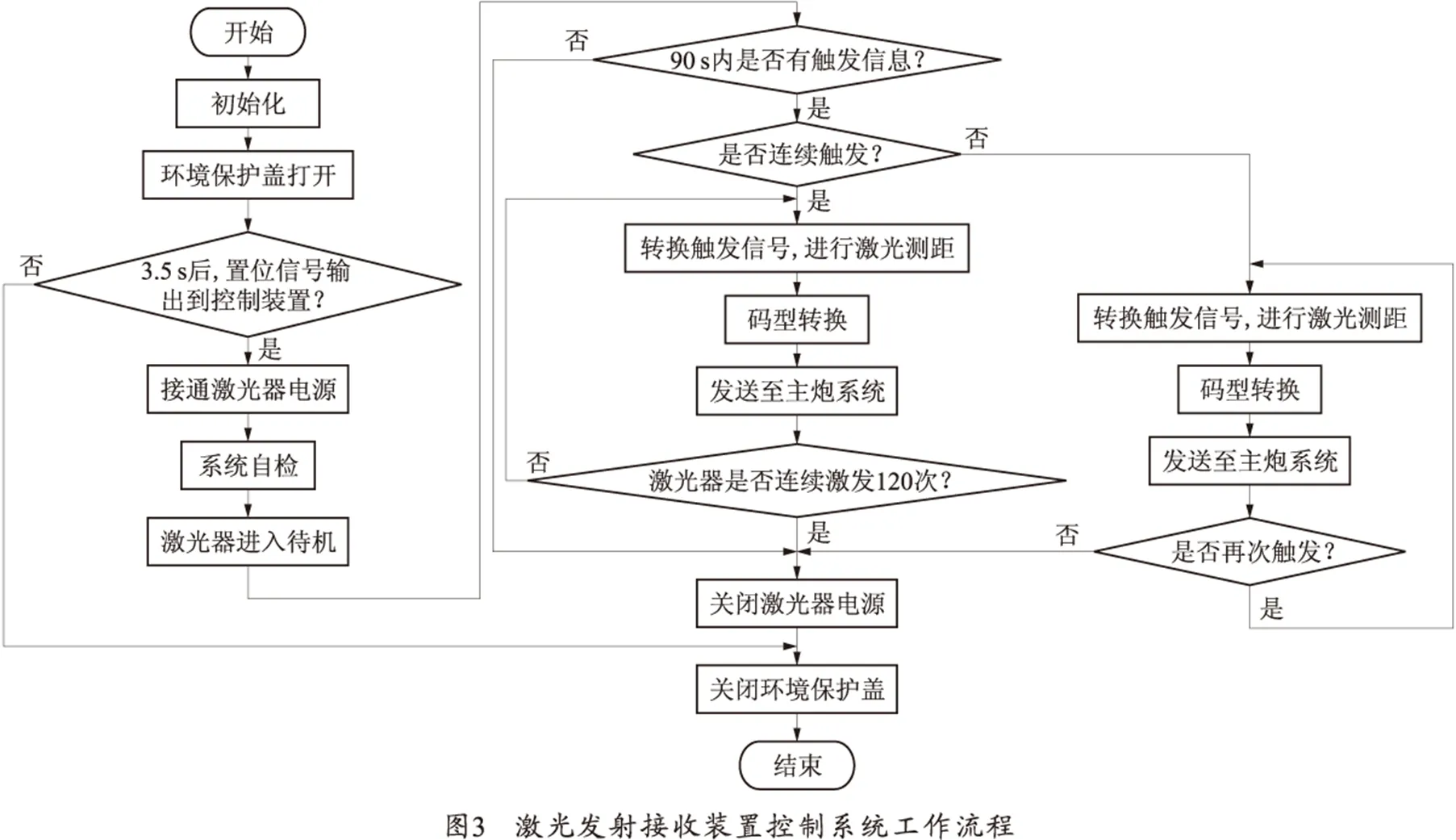
激光发射接收装置控制系统工作流程如图3所示。结合图3,对控制系统的工作流程进行具体分析:
1)控制系统加电后,首先进行计时器、I/O口等的初始化设置。
2)初始化完成后,系统自检,发出距离信息为1 500的20位双阶双极性不归零自检码。
3)自检通过后,主程序以10 ms的周期反复读I/O口,直到读到“开盖”指令。
4)工控机给出“开盖”指令后,环境保护盖打开,同时开始计时,如3.5 s内,读到“开盖置位”信号,则发送“激光电源控制”指令到激光电源模块,启动激光器;如3.5 s内未读到“开盖置位”信号,则关闭环境保护盖,退出程序。
5)激光器启动后,处于待机状态,如90 s内读到“激光触发”信号,激光器进行触发测距,激光器将测得的十六进制距离信息经串口2发送给工控机,经解算,工控机将收到的距离信息转换为20位双阶双极性不归零码。如90 s内未读到“激光触发”信号,则断开激光电源模块,关闭环境保护盖,退出程序。
6)工控机经串口1发送20位双阶双极性不归零码至OCL互补功率放大电路;然后等待下一次“激光触发”,如90 s内读到该信号,执行激光触发,直到执行完第120次激光触发后,断开激光电源模块,关闭环境保护盖,退出程序。
2.2 双阶双极性不归零码转换
工控机与激光器之间采用RS422通讯协议,波特率为9 600 bit/s,激光器将距离信息发送给工控机。根据协议格式,工控机将十六进制距离信息解算为二进制码[4],然后将二进制码转换为双阶双极性不归零码[5-6]。双阶双极性不归零码幅值为4~5 V、单脉冲宽度为2 μs,由正脉冲到负脉冲表示数字量“1”,由负脉冲到正脉冲表示数字量“0”,码型数字量表示如图4所示。

根据主炮系统通讯协议,激光发射接收装置发送给主炮系统的距离信息为20位双阶双极性不归零码,20位码定义如表1所示。
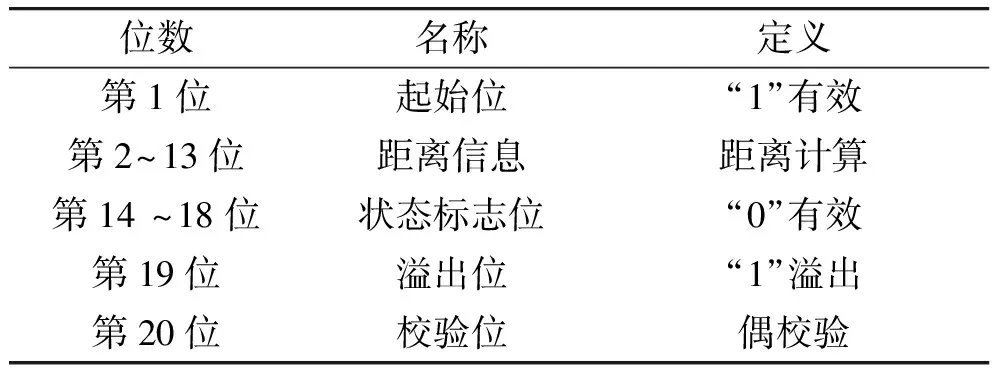
表1 20位双阶双极性不归零码
起始位用数字量“1”表示,状态标志位用数字量“0”表示,如果有溢出,则用数字量“1”表示,校验位为偶校验,即当距离信息中数字量“1”的个数为偶数,校验位用“0”表示,当数字量“1”的个数为奇数,校验位用“1”表示。
2.3 环境保护盖控制电路设计
环境保护盖控制电路由开盖电路、关盖电路、自保护电路三部分组成,其控制电路原理图如图5所示。

当环境保护盖处于初态时,行程开关S1常开触点闭合,行程开关S2常开触点断开,工控机输出开盖指令,三极管VT1的开关电路接通,继电器K1通电动作,电机顺时针方向旋转,环境保护盖打开,当行至水平位置时,行程开关S2动作,常开触点闭合,电机电源被切断,停止工作,与此同时输出开盖置位信号给工控机。
当工控机输出关盖指令,行程开关S1常闭触点给电机供电,电压的极性与开盖时极性相反,电机逆时针方向旋转,环境保护盖关闭,当到达初态位置时,行程开关S1动作,常开触点闭合,电机电源被切断,停止工作。
在开盖或关盖的过程中,如果发生堵转,电机瞬时电流增大,可控硅VS1导通,自保护电路接通,断开电机电源,避免电机因发生堵转而造成烧损。此外,在软件设计上也对电机加以保护,当开盖指令发出后,如果在3.5 s内工控机未收到开盖置位信号,控制系统将自动切断电机电源。
2.4 功率放大电路
在激光发射接收装置向火炮系统传送20位串行码时,由于传输距离较远,导致信息传输不可靠。基于此,在输出端增加功率放大电路。根据双阶双极性不归零码的特性,设计OCL互补功率放大电路[7],如图6所示。
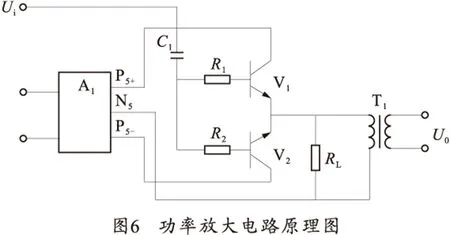
在输出端引入了信号隔离变压器T1,以消除系统干扰对输出的20位双阶双极性不归零码的影响,A1为±5 V双路输出DC/DC电源模块,单路输出电流为2 A。
当输入端电压Ui>0且逐渐增大时,V1管基极电流也随之增大,输出端RL得到正方向电流;当Ui<0且逐渐减小时,V2管基极电流也随之增大,输出端RL上得到负方向电流。综上,输入信号在正半周主要是V1管发射极驱动负载,而负半周期主要是V2管发射极驱动负载。
功率放大电路最大不失真输出电压的有效值为
(1)
最大输出功率为
(2)
平均输出功率为
(3)
转换效率为
(4)
3 试验
将激光发射接收装置与试验工装对接;通电后,控制系统进行自检,自检通过,向主炮系统发送值为1 500的20位双阶双极性不归零码自检信号,如图7所示。
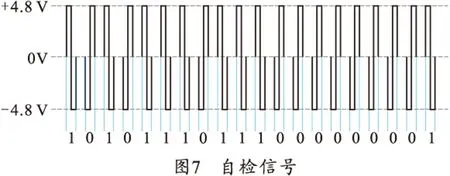
从图7可见,20位双阶双极性不归零码的第1位起始位“1”,第2位到第13位距离信息“010111011100”,第14位到第18位状态标志位“00000”,第19位溢出位“0”,第20位偶校验位“1”。计算距离信息所表示的距离值:
0101: 22+20
1101: 23+22+20
1100: 23+22
自检距离值L0:
L0=(22+20)×162+(23+22+20)×16+(23+22)×160=1 500
将激光发射接收装置瞄准远处目标,实物目标标定为879 m,扳动“开盖”开关,环境保护盖打开;开盖置位后,输出开盖置位信号,工装上信号指示灯点亮,开盖正常;接通激光器电源控制信号,激光器工作,按下“激光触发”按钮,进行激光测距,通过示波器读取20位双节双极性不归零码,如图8所示。
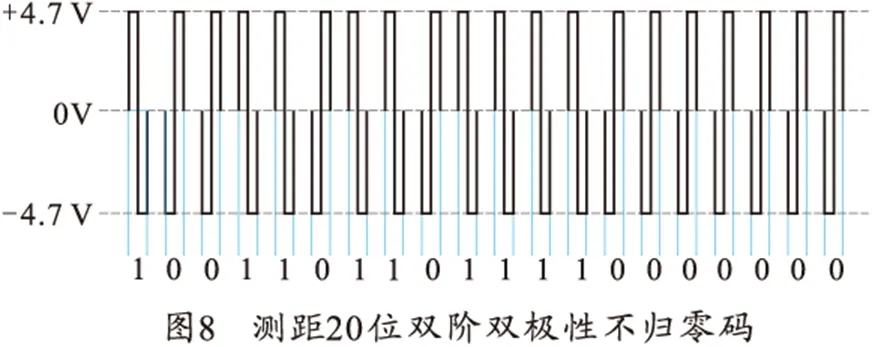
计算20位双阶双极性不归零码,得到实测距离值L:
L=(21+20)×162+(22+21)×16+(23+22+21+20)×160=879
4 结束语
笔者在对原激光发射接收装置控制原理分析的基础上,设计了新型控制系统,给出了该系统的组成、工作原理、工作流程,具体分析了设计中的3个关键点,双阶双极性不归零码转换、环境保护盖控制电路的设计和功率放大电路的设计。通过试验,分析并得出了20位双阶双极性不归零码与实测距离之间的算法。经试验验证和设备实装工作,新型激光发射接收装置控制系统工作稳定、可靠。
猜你喜欢
制造业自动化(2022年9期)2022-10-03
中学生报·教育教学研究(2022年1期)2022-04-18
时代英语·高一(2019年5期)2019-09-03
电脑知识与技术(2016年21期)2016-10-18
印刷技术·数字印艺(2015年7期)2015-08-31
现代电子技术(2015年5期)2015-03-31
微型计算机·Geek(2009年3期)2009-12-11
数理化学习·高一二版(2009年2期)2009-03-30
数理化学习·高一二版(2009年1期)2009-03-19
