
提高无人机航测空三加密精度的方法
2018-09-28 05:29:44黄文钰
西北水电 2018年4期
黄文钰
(中国电建集团西北勘测设计研究院有限公司,西安 710065)
0 前 言
无人机航测技术已经成功应用于大量的项目生产,如何快速有效处理海量无人机数据,保证航测成图的精度,是航测发展面临的首要问题。
空三(空中三角测量)加密,指利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加4个以上,然后利用这些已知点解求所有影像的外方位元素。空三加密精度不够,会导致航测外业的像控点量测甚至航飞环节的返工[1],并引起航测内业后续工序无法开展[2-3]。
无人机影像与传统航摄影像相比,具有成本低廉、时效性强等优点,近年来被广泛应用到地形图绘制和三维建模等项目。但是无人机影像也具有明显的缺点:① 姿态稳定性差;② 影像畸变大;③ 基高比小、模型切换频繁,高程精度低。目前市场上还没有无人机空三加密的软件能完全解决这些问题,精度很难满足传统航测规范要求。
为便于说明问题,选择具有代表性的“贝壳梁风电场无人机航测项目”为对象进行分析。使用传统的空三加密办法,基本定向点残差统计如表1所示。

表1 贝壳梁风电场无人机航测1∶2 000空三加密精度统计表(传统空三方法)
根据GB 23236-2009《数字航空摄影测量 空中三角测量规范》的要求[4],此项目为1∶2 000丘陵地形图测图,基本定向点残差最大限值为平面位置中误差0.6 m,高程位置中误差0.26 m。
而以上统计表明,该风电场基本定向点的中误差不能满足规范的精度要求,尤其是高程中误差较大,33%的点高程中误差不满足规范要求。
对其他几个类似的无人机航测项目进行了空三加密的精度统计,得到表2。
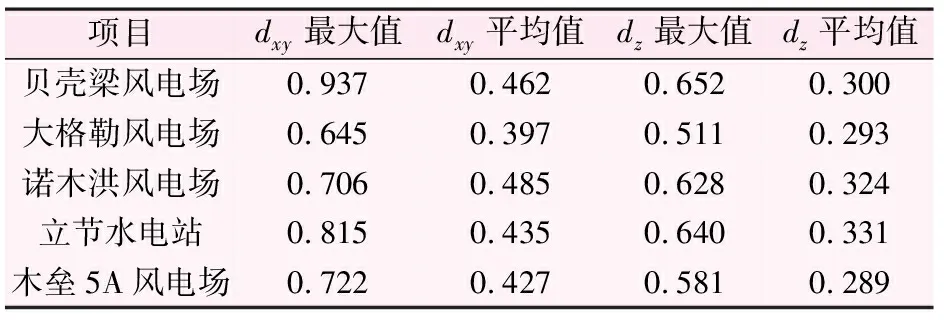
表2 无人机航测1∶2000空三加密精度统计表(传统空三方法)
对上述的几个无人机航测项目进行了空三加密的精度统计分析,得到图1 。
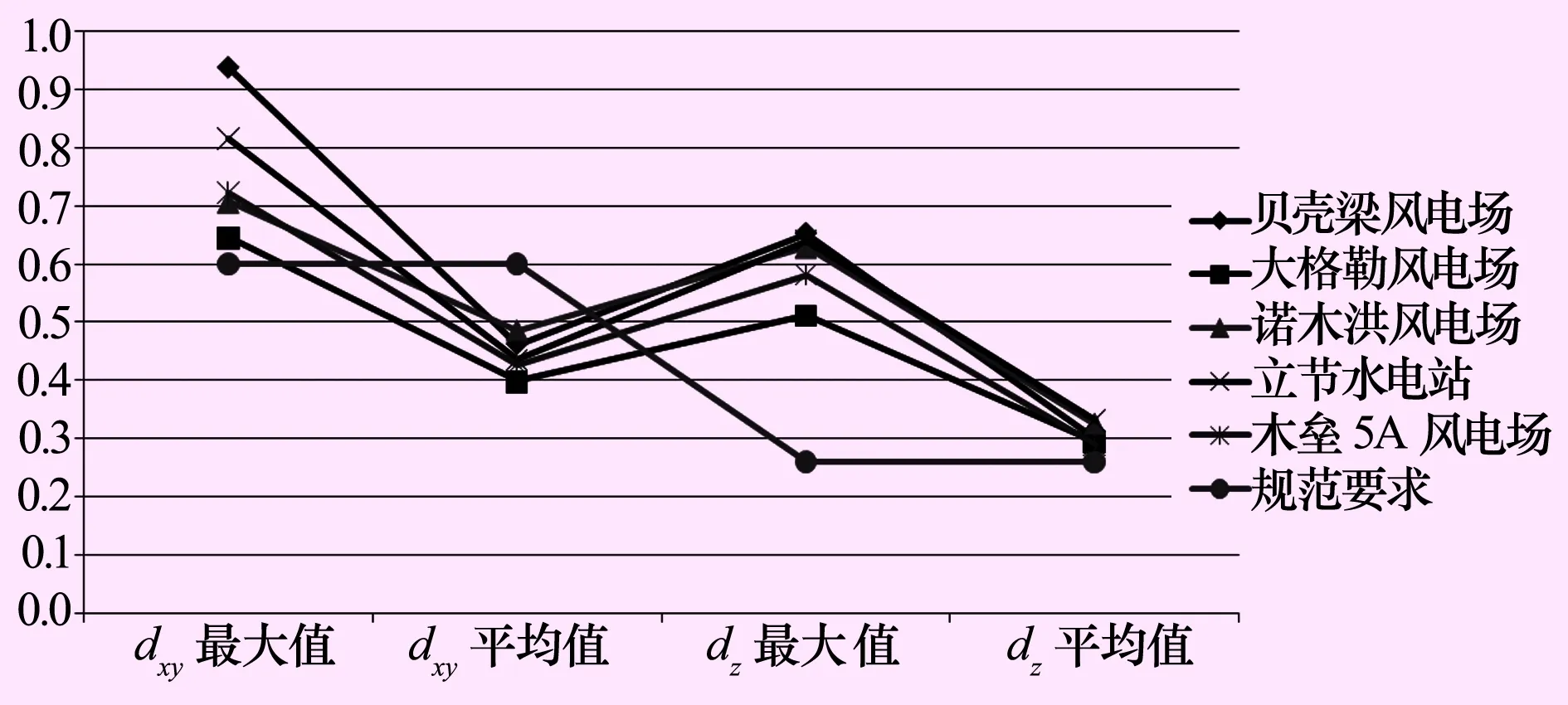
图1 无人机航测1∶2 000空三加密精度统计图
图1表明这些项目的基本定向点的平面位置和高程中误差都与规范要求存在一定差距。
1 改进方法
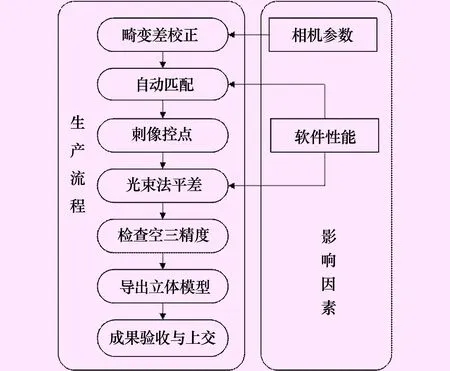
图2 无人机航测空三加密的主要流程图
本文从无人机航测空三加密的流程入手进行分析,寻找技术改进方法。传统的无人机空三加密流程如图2所示。
由于无人机影像一般是由非量测相机获取的,必须经过畸变差校正后才能进行空三加密,这一环节需要严密的相机检校参数,否则严重影响影像匹配的精度[5]。而自动匹配与光束法平差环节受软件性能制约,如果有匹配算法不合适以及与平差参数不合理的情况,导致空三加密自动化程度过低,需要大量人工干预,会降低空三加密的效率和精度,加大内外业工作量,甚至导致空三失败[6]。
综上本文针对以上2个问题进行研究,改进空三加密的方法。
1.1 优化相机检校方法,得出准确的相机参数
现阶段在无人机航测生产过程中,绝大多数生产单位使用的都是非量测相机。为了达到较好的航测精度,就必须对使用的非量测相机进行检校,而且考虑到非量测相机的畸变差参数的不稳定性,就必须隔段时间就对非量测相机进行检校[7]。这样,简单快捷的相机标定方法及软件就显得尤为重要和迫切,通过以下3种方法的比较来确定相机检校的实施方案。
1.1.1 相机自检校
自检校方法是利用定焦相机的镜头光学结构不随主距变化而变化的特点,通过预检校获取内方位元素的变化规律,以此来减少检校未知数的个数,达到简化自检校模型的目的[8]。在不需要建立检校场的情况下,只利用目标周围的影像和影像之间的对应关系对相机进行检校,此种方法造价低,操作简单,仅依靠一些影像和软件即可完成,但经过项目实验发现,此种方法的缺点是稳健性较差,对空三加密精度的提高有限,适用于相机参数本身比较准确的影像,而对相机参数已发生较大变化的影像来说,改善效果并不明显。
1.1.2 物理检校
物理检校需要将相机送往专业的研究机构进行检校。实验表明,该方法得到的相机参数较为准确,用此相机检校参数能较大幅度地提高空三加密的高程精度。但该方法也存在一些缺点:① 费用较高,按一般情况估计,一台非量测相机1 a的费用约为3~5万元;② 必须将相机送往专业的实验室,检校周期较长,可能影响其他项目的航摄,相机来回运送也会产生较高的费用和风险。
1.1.3 自主建立室内检校场进行检校
结合无人机非量测型相机标定的需求,本文提出了一种基于卡片式标定板的便携、免控制的相机标定解决方案,给相机标定带来了较大的便利。
(1) 场地选择
拍摄相机标定影像,需要一个较开阔的拍摄场地。场地要求如下:① 拍摄场地需要光线充足;② 场地面积不能小于3 m×2 m;③ 拍摄者站立位置与墙壁距离不能小于3 m;④ 背景最好为白色的墙壁;⑤ 墙壁平整,确保四周没有遮挡。
(2) 摆放标定板
确定场地及摆放位置后,即可开始摆放标定板。
1) 材料准备:准备泡沫板、双面胶带、大头针等材料。
2) 摆放标定板时先利用双面胶带将泡沫板固定在墙上,再利用大头针将标定板固定在泡沫板上。
布设标定场时,标定板之间需要有一定的高差,主要目的是模拟出地形起伏。按照标定要求在规定的3个拍摄位置:标定板正前方,标定板右前方以及标定板左前方,拍摄45张以上的影像,应用相应软件进行一键标定,计算出相机参数。相机检校标志摆放如图3所示。
图3 相机检校标志摆放示意图
仍以贝壳梁风电场的研究对象,比对2种相机检校方法的效果,得到的结果如表3所示。
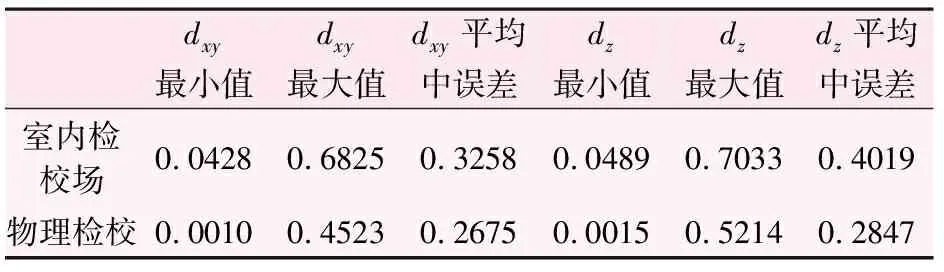
表3 两种相机检校方法的相机参数应用情况比较表
分析得到,室内检校场方法比物理检校方法的精度略低,但室内检校场可以多次利用,大幅度降低成本。并且仅仅依靠相机检校的办法,空三加密精度并未完全满足规范要求,需要继续改进空三加密技术。
1.2 针对测区特点优化软件配置组合,提高无人机航测空三加密精度
1.2.1 Pixelgrid软件的特点
Pixelgrid摄影测量系统是国产空三软件的领先者,空三加密的精度可靠,质量可控,被广泛应用于航测内业数据处理中。该软件处理无人机航测数据,步骤划分较细,优点是程序稳定,对无人机飞行姿态要求不高,每一环节都能进行人工干预和质量控制,缺点是自动化程度不够高,处理速度较慢,满足不了项目工期需要。
1.2.2 Inpho软件的特点
Inpho是世界领先的航测数据处理系统,最显著的优点是自动化程度与全自动匹配精度较高,但软件对无人机飞行姿态、pos精度、地物纹理的要求较高,如遇到条件不理想的测区,匹配错误较多,而该软件的人工干预量较少,对于困难区域无法保证空三加密精度。
以往采用的单一软件的空三加密,由于各软件本身的缺陷,存在较多点位中误差超限和返工现象。2种优势明显的软件联合使用,在充分利用inpho快速自动处理海量无人机数据能力的同时,能结合Pixelgrid过程控制的优势,实现优化资源配置,提高生产效率。联合空三加密的优势如表4所示。
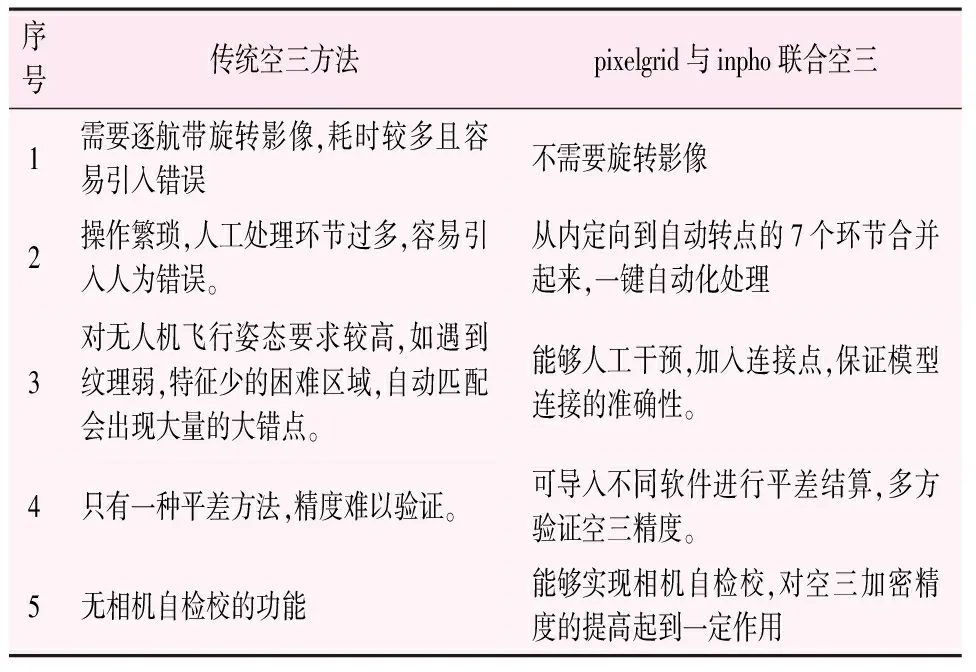
表4 pixelgrid与inpho联合空三优势统计表
对贝壳梁风电场影像数据,采用室内检校参数,并使用pixelgrid与inpho联合空三加密方法后,结果如表5所示,已满足规范要求。

表5 贝壳梁风电场无人机航测1∶2 000空三加密精度统计表(联合空三方法)
选取了其他几个航测成图项目,利用空三加密得到的基本定向点中误差,结果如表6所示。
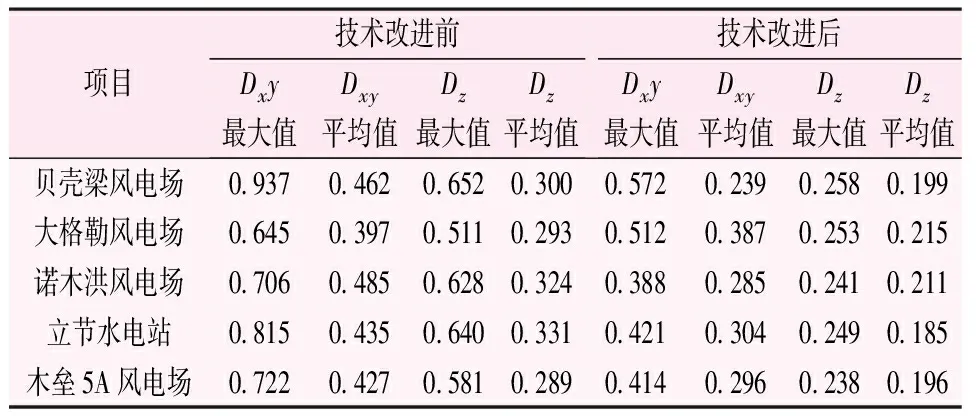
表6 技术改进前后情况对比表
在此后的1∶1 000地形图的谷梁风电场、哈密抽水蓄能等项目也得到了验证,空三加密精度完全满足国家1∶1 000空三加密的规范要求。统计结果如表7所示。
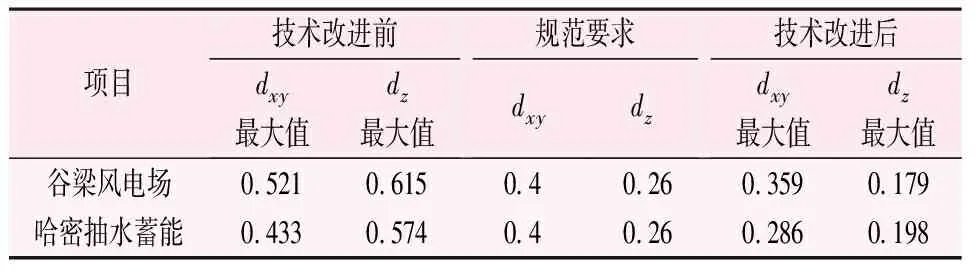
表7 1∶1 000空三加密精度统计表
对上述两个1∶1 000无人机航测项目进行了空三加密的精度统计分析,得到图4,表明1∶1 000地形图的空三加密精度也能满足国家规范的相应要求。
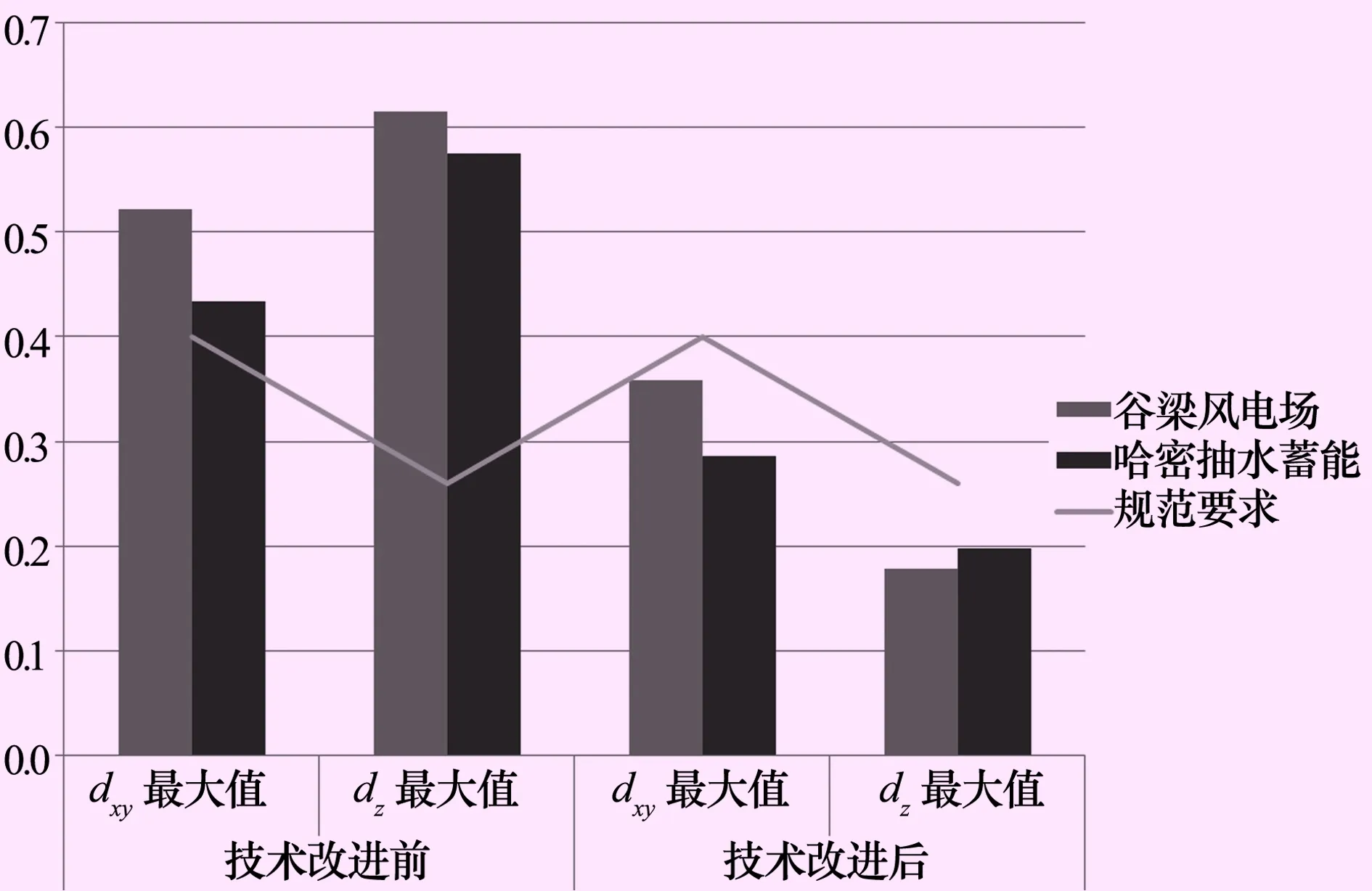
图4 1∶1 000项目空三加密精度统计图
2 结 语
本论文主要研究了无人机航测空三加密精度的提高方法,通过比较各种相机检校方法,综合考虑精度、效率和成本,自主创建了高精度的室内相机检校场;并进行了空三加密软件的联合平差实验,优化了软件组合和配置;从而完成了对传统空三加密流程的改进。
经过与传统空三加密方法的比较实验以及项目推广实验,表明了改进后的空三加密方法较好地解决了无人机航测高程精度较低的问题,空三结果能满足1∶1 000、1∶2 000地形图国家规范的精度要求,从而提高了航测成图的精度。综上所述,本文研究的方法为无人机航测成图提供了一种较新的思路和较为实用的方法。
猜你喜欢
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
测绘通报(2019年4期)2019-05-10 08:16:20
电子制作(2018年17期)2018-09-28 01:56:44
企业科技与发展(2018年5期)2018-09-10 00:20:39
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
通信电源技术(2016年4期)2016-04-04 02:57:38
