基于红外载波调制和RS485总线的液压支架遥控装置研究
2018-09-28 02:41许春雨田慕琴宋建成马旭东宋单阳张润冬
中国煤炭 2018年9期
陈 昆 许春雨 田慕琴 宋建成 马旭东 宋单阳 张润冬
(1.太原理工大学,山西省太原市,030024;2.煤矿电气设备与智能控制山西省重点实验室,山西省太原市,030024;3.矿用智能电器技术国家地方联合工程实验室,山西省太原市,030024)
液压支架是综采工作面不可或缺的支护设备,主要用于综采工作面顶板支护,为操作人员提供作业空间。当前,我国煤矿生产主要依赖操作人员使用电液控制系统对邻近液压支架进行手动控制,尽管采用邻架操作一定程度上保证了操作人员的人身安全,降低了劳动强度,但由于存在井下支架数量多、煤层结构复杂、操作视线受干扰、操作空间受限等问题,需要一种无线装置对液压支架进行近距离无线遥控。
无线电频段和红外频段是适用于高速、短程无线通讯的主要频段。无线电波长长、发射能量分散,无法满足煤矿井下复杂电磁环境下通讯可靠性要求;红外频段具有波长短、发射能量集中、抗干扰能力强、有一定的方向性等特点,是实现液压支架精准、可靠、稳定遥控的有效手段。本文提出了基于红外线载波调制和RS485总线的液压支架电液遥控策略,阐述了遥控装置的控制过程,实现了对综采工作面多支架、多功能的近距离无线遥控,具有一定的应用价值。
1 遥控方案
1.1 遥控装置功能
针对煤矿综采工作面液压支架数量多、控制流程复杂、作业周期长等特点,液压支架遥控装置应具备以下功能:
(1)邻架遥控功能。遥控发射器需对全工作面各支架的立柱、伸缩梁、平衡梁、一二级护帮、侧护板的伸收以及推镏、拉架、提底、喷雾等动作进行遥控。《煤矿安全规程》规定,液压支架电液控设备不允许对本架进行操作,因此遥控发射器只能对左右邻近多台支架进行遥控。
(2)成组遥控功能。支架成组动作通常包括成组推镏及拉架动作。以成组推镏为例,遥控发射器需按工艺要求设定成组推镏架数,成组遥控命令发送后,采煤机后滚筒后10~15架处开始成组沿割煤方向执行多架成组推馏功能。
(3)小循环操作功能。遥控发射器应具备液压支架多动作一键控制功能。一个完整的小循环功能主要包括降柱、提底、拉架和升柱,按照降柱-提底-拉架-升柱的顺序依次执行。
1.2 遥控操作策略
为了适应煤炭生产作业连续性以及综采设备操作便捷性的需要,遥控发射器需在遥控策略上满足快速性、可操作性及灵活性的设计要求,其外部结构设计如图1所示。

图1 遥控发射器外部结构图
遥控发射器采用本安型便携式设计,由支架工手持操作。当邻架遥控时,使用当前架号两端预选按键确定当前支架号,使用目标架号两端预选按键确定目标支架号,通过功能键输入动作类型,即可对待控支架各动作进行遥控操作。当成组遥控时,选定待控支架后,先选择成组命令键,再按下工艺流程对应的成组动作即可。由于井下支架动作的特殊性,成组参数需在生产技术部门统一商定后,在支架控制器内部进行设置。小循环操作与成组遥控过程类似,采用左成组与右成组两按键同时按下表示小循环命令。
1.3 遥控装置控制结构设计
本文设计的液压支架遥控装置由遥控发射器和接收电路组成,遥控装置结构框图如图2所示。
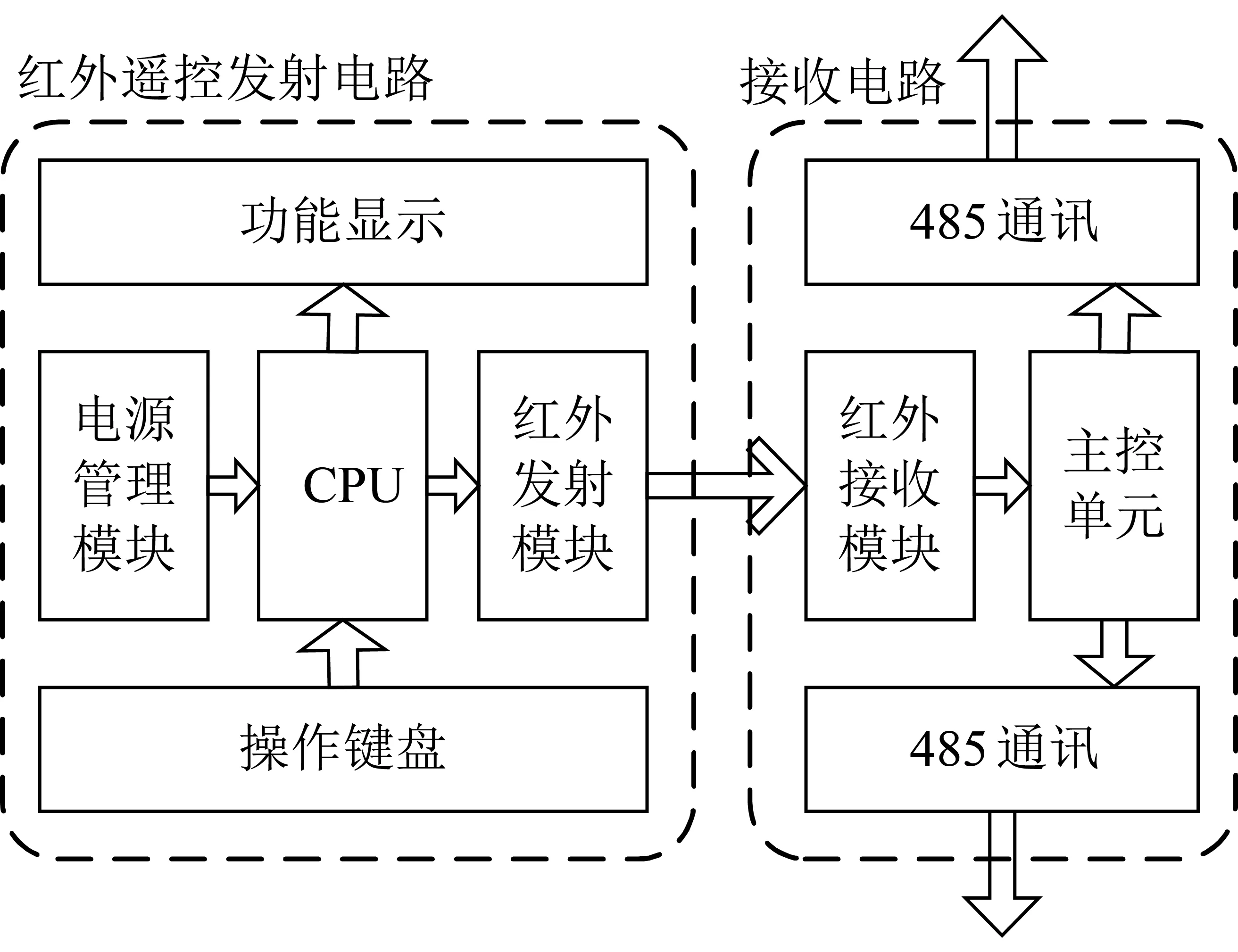
图2 遥控装置结构框图
遥控发射器主要包括电源管理模块、操作键盘、主控CPU、功能显示及红外发射模块。其中,电源管理模块集成了充电管理、电量监测、节电优化功能,保证了便携式装置在井下长时间生产作业的续航要求。主控CPU将操作人员通过键盘输入的控制信息进行编码处理后,由红外发射模块向外发出。功能显示区可显示当前支架号、目标支架号、动作命令及电量信息,方便生产人员进行操作。
接收电路集成在各支架控制器的内部,由红外接收模块、主控CPU及左右两路485通讯电路组成。红外接收模块接收到遥控器发出的遥控命令进行载波信号的转码,将红外线信号转换为可供单片机读取的数字信号。单片机对数字信号进行二次转码,转换为符合支架控制器内部通讯协议的控制信号,通过左右485通讯电路传输到目标支架控制器,完成对目标支架的遥控。
2 遥控装置硬件设计
2.1 遥控发射器硬件设计
在对液压支架近距离遥控操作过程中,遥控发射器主要完成当前架号确认、目标架号选择、动作命令发送等一系列功能,遥控器硬件电路需要满足通信稳定性、操作便捷性及续航可靠性等要求。
遥控发射器硬件电路由CPU、JTAG调试接口、外部晶振、充电管理、矿用锂电池组、电源稳压电路、锂电池充电指示电路、红外信号编码及其发送电路、矩阵式键盘及LCD显示电路组成。遥控发射器硬件结构如图3所示。

图3 遥控发射器硬件结构
遥控发射器内部以C8051F020单片机为处理核心。C8051F020作为一款8位定点运算单片机,时钟频率可达25 MHz,不仅运算速度快、运行功耗低、硬件资源丰富,还具备灵活的外设配置功能,允许通过设置交叉开关对外部设备接口进行功能配置。
电源管理模块选用目前较为成熟的矿用可充电锂电池组作为设备电源。充电管理模块内部采用CN3052A型充电管理芯片对设备进行恒流/恒压模式下的高效、安全充电。该芯片内部集成了功率晶体管,电路结构简单、高效可靠。
充电指示器电路使用LM339四路差动比较器设计,可以在设备充电状态下,通过四路LED指示灯显示充电完成情况。电量监测环节利用了锂电池端电压随电量值变化关系,通过将电池两端电压送入单片机片内AD采样计算,将设备剩余电量值在遥控器显示面板实时显示。
红外信号编码电路选用PT2262芯片进行信号编码。PT2262是目前无线通讯领域最常用的芯片之一,最多有12位(A0~A11)地址码管脚、6位(D0~D5)数据码管脚。经过硬件内部编码,设定的地址位和数据位可从Dout端以38 kHz载波形式,经由两级功率放大电路通过红外发射管发射出去。
2.2 接收电路硬件设计
本文设计的液压支架遥控装置将接收电路集成在支架控制器内部,与整套电液控系统结合为一体,协同运行。传统的液压支架电液控系统通常设置有基于红外信号识别的采煤机位置检测电路。为了与现有系统充分融合,避免两种红外信号下的解码干扰,对红外接收电路进行了设计优化。系统整体配置结构如图4所示,接收电路硬件结构如图5所示。

图4 系统整体配置结构

图5 接收电路硬件结构
液压支架遥控装置接收电路主要分为红外信号通讯和RS485信号通讯两路通讯结构。其中红外信号通讯包括一体化红外接收头、遥控信号解码电路和采煤机位置信号解码电路,RS485通讯主要包括左邻架和右邻架两路通讯电路。
一体化红外接收头选用HS0038模块,其集红外线接收、前置放大和解调电路于一体,中心频率为38 kHz,可改善自然光的反射干扰,输出脉冲稳定,可准确还原遥控器发出的载波信号。
遥控信号及采煤机位置信号接收解码电路使用PT2272-M5遥控解码器,该芯片外部包含7位地址引脚及5位数据引脚。考虑到综采工作面液压支架数量多,有时甚至多达200余台,因此在信号传输过程中,设计了地址码复用及功能码分时发送的编码方式。
RS485通讯主要由2路RS485通信总线构成,分别包括光电隔离、MAX485及防高压侵入保护电路。MAX485芯片用于将通信信号转变为RS485通信协议信号,光电隔离和防高压侵入保护电路则保证了通信过程的安全稳定。
3 红外遥控编码设计
3.1 红外编码结构
井下工作面电磁环境复杂,且液压支架数量较多,各支架紧密连接,遥控发射器任一时刻发出的遥控命令都会被多台支架同时接收。为了提高无线通讯的准确性及抗干扰能力,需要设计可靠的无线通讯协议以确保无线信号的可靠传输。
PT2262红外编码芯片采用2个周期占空比为1∶3的波形来表示数字量“0”以及2个周期占空比为2∶3的波形来表示数字量“1”,发出的编码信号由地址码、数据码、同步码组成一个完整的码字。液压支架遥控器数据帧格式见表1。
将当前支架架号作为地址码,可以从硬件上防止不同支架同时接收到遥控信号而造成通讯干扰,引起误动作。

表1 遥控器数据帧格式
3.2 红外解码方式
对PT2262常用的解码方法有硬件解码和软件解码。硬件解码是采用专用的PT2272解码芯片,当发射器与接收电路设定相同的地址码时,在有效的通信距离内,接收电路可正确解码载波信号。硬件解码速度快、使用方便,应用方案较为成熟。软件解码是通过对红外接收头输出波形的分析,由CPU来进行解码。软件解码配置灵活,不受发射端地址码配置的影响,但解码速度较慢,完成单功能的解码需100 ms左右的时间,无法满足井下液压支架控制的快速性要求。
本文设计了基于PT2272专用解码芯片的硬件解码电路。由于PT2262每次至少发射四组字码,第一组字码容易受零电平干扰,从而产生误码,因此PT2272只有在连续两次检测到与自己相同的地址码时,才会判断为遥控信号接收正常。
3.3 二进制编码压缩
随着综采自动化技术的广泛推进,单个综采工作面液压支架布置规模甚至已经多达200余台,对其进行立柱、伸缩梁、平衡梁、一二级护帮、侧护板的伸收,及推镏、拉架、提底、喷雾等各功能日趋完善,一台液压支架遥控器需要实现对整个工作面液压支架各功能的准确遥控。以200台液压支架、16个单动作、8个成组动作及1组工艺设定小循环动作为例,就需要至少8位地址码、13位功能码来实现遥控功能。这必然会导致红外通讯编码冗长,不利于遥控命令的编码和传输。因此,本设计需要对红外编码信号进行压缩和优化处理。
3.3.1 地址码复用
以隔架单动作遥控为例,在30号支架位置,操作人员需要对右侧32号支架进行“推镏”操作:当前架号为30,其二进制对应为:m1=00011110;目标架号为32,其二进制对应为:n1=00100000。假设“推镏”动作设定为第“5号”动作,其动作编码二进制对应为:p1=00101。因此,该动作遥控指令对应的红外编码应为:D1=000111100010000000101。
考虑到井下液压支架数量及红外线传播距离等因素,本装置采用了地址码复用的编码设计。设当前支架号为M,当前支架号对应二进制码为m1,见式(1):
(1)
式(1)中DEC2BIN函数表示为十进制数对应的二进制码值,通过地址码复用的方法,将整个工作面每128台支架作为一组,从而实现分组控制。
3.3.2 限制可控区间
由于液压支架电液控制系统不允许本架控制本架,必须在控制支架的相邻架或者是相隔架进行操作。同时受制于井下操作视野范围,本装置按照就地手动控制模式技术要求,将可控区间限制为左右各4架,采用方向标志位与控制距离来确定目标架号,则目标架号编码二进制见式(2):
(2)
以上操作示例中,目标架号对应二进制数为:n1=101。
3.3.3 功能码分时复用
为了进一步压缩编码结构,提高红外通讯稳定性,本装置设计了功能码分时复用模式。通过液压支架遥控发射器主控CPU内部控制单元,将每段功能码分为两组数据分时发送,并用标志位加以区分。接收电路通过判别标志位状态,将两组数据同时接收并处理,从而还原出发射器端发出的控制命令。结合目标架号的编码规则,动作编码二进制见式(3):
(3)
以上操作示例中,动作编码二进制见式(4):
(4)
该动作遥控指令对应的红外编码见式(5):
(5)
本文所设计的编码结构,将当前液压支架架号作为地址码,地址码范围设定为0000001~1111101(排除了0000000和1111111两组易产生误码的地址码),超过125架则进行地址码复用。采煤机位置检测电路红外地址码设定为1111110,与采煤机红外发射器相匹配,用以实时采集采煤机位置信号。
功能码复用设计会在任意功能按键按下之后连续发送两组功能信息,经过红外接收电路解码后,单片机扫描功能引脚将数据存入工作区,并生成最终功能控制码。以右邻架控制为例,按键功能对应编码见表2。

表2 按键功能对应编码
单动作遥控时,功能码包含邻架方向信息、预选架号信息及动作信息。成组动作遥控时,功能码包含成组方向信息及成组动作信息。
4 遥控装置软件设计
4.1 遥控发射器软件设计
为了最大限度地降低系统功耗,遥控发射器在处于休眠状态时,系统将关闭液晶显示背光。按键采用中断触发方式,上电启动后立即进入休眠模式,当有按键按下时,触发外部中断唤醒CPU。另外,本系统在软件和硬件上设计按键防抖功能,确保按键指令的正确输入。
遥控发射器主程序的主要功能是完成对8051F020及外围电路的初始化和开中断,并进入等待模式。一旦产生中断,唤醒CPU进入工作模式,调用相应的按键处理子程序进行命令码的处理,并将处理后的数据发送到红外编码芯片。遥控发射器主程序流程如图6所示。
4.2 红外接收子程序设计
红外编码芯片PT2262发出的编码信号由地址码、数据码、同步码组成一个完整的码字。解码芯片PT2272-M5接收到信号后,其地址码经过两次比较核对后,VT脚才输出高电平,同时相应的数据脚也输出高电平。
通过对遥控信号标志位的提取,判断某一时刻有无遥控命令发射。一旦判为有效,可将命令码存储到指定工作区进行处理。处理后的命令码应与支架控制器按键数据格式相匹配,跳转到按键处理子程序中,并将红外遥控信号与RS485通讯格式进行匹配。红外接收子程序流程如图7所示。

图6 遥控发射器主程序流程

图7 红外接收子程序流程
5 试验验证
为了验证上述示例中控制模式,在实验室搭建煤矿无人值守综采工作面液压支架电液控制系统试验平台对所设计的红外遥控装置进行了试验,试验现场如图8所示,当前架号及目标架号动作执行情况如图9所示。

图8 试验现场

图9 当前架号及目标架号动作执行情况
试验过程中,使用硬件测试板内部主控单元驱动红外发射单元作为遥控发射器,通过装置内部单片机编译程序参数,使之连续输出特定红外编码信号以模拟遥控器动作命令。将发射装置放在带有红外线接收头的第30号支架控制器水平间距1m处,此时该控制器成功接收到红外信号并伴随指示灯闪烁,控制器进入遥控信号接收模式。同时,第32号支架控制器快速进入遥控命令执行模式,并准确输出动作命令。
6 结语
本文基于综采工作面生产要求,提出了一种基于红外载波调制和RS485总线的液压支架近距离遥控策略,开发了遥控发射和接收装置,并采用硬件编解码、编码压缩算法提高了通讯过程的实时性、可靠性和稳定性。通过手持式遥控装置实现了对全工作面的邻架遥控、成组遥控及小循环操作功能。试验结果表明,目标支架能够实时准确地接收到遥控器发出的红外命令并迅速响应,实现了对液压支架的近距离无线遥控控制。
猜你喜欢
中国石油石化(2022年12期)2022-07-16
兵器知识(2020年11期)2020-11-18
制造技术与机床(2019年11期)2019-12-04
中国外汇(2019年19期)2019-11-26
自动化仪表(2019年10期)2019-10-25
兵器知识(2019年1期)2019-01-23
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
汽车维护与修理(2018年3期)2018-12-07
小猕猴智力画刊(2018年7期)2018-08-08