
MAGIC CARPET着舰技术分析
2018-09-27 11:37吴文海郭晓峰
系统工程与电子技术 2018年9期
吴文海, 汪 节, 高 丽, 张 杨, 郭晓峰
(海军航空大学青岛校区仪电控制系, 山东 青岛 266041)
0 引 言
人工着舰是着舰引导最终阶段的最基本方式,也是全天候着舰引导系统(all weather carrier landing system,AWCLS)的重要组成部分。在AWCLS的4种工作模态[1](Mode I,Model IA,Model Ⅱ和Model Ⅲ)中,除了Mode I模态是全自动着舰以外,其他模态最后都要进行光学引导下的人工着舰。另外,由于飞行员在心理上并不完全信任自动着舰,因此在天气允许的情况下,飞行员一般会选择人工着舰。
飞机低动压着舰时,一般都是工作在阻力曲线的反区。此时,纵向操纵方式有frontside操纵和backside操纵两种[1-4]。由于backside操纵方式的轨迹高度控制等性能更好,因此从1911年美军首次成功着舰到现在,着舰纵向控制基本都是采用backside操纵方式,即用油门控制下滑,俯仰杆控制迎角。而侧向上一直都是采用侧向杆控制滚转角完成对中,用方向舵来协调对中。这种人工着舰控制方式有4点不利。
(1) 操纵输入过多且相互耦合,着舰操纵难度很大。至少有4个操纵输入,且这些操纵输入都是很复杂地相互耦合在一起,例如纵向的两个控制输入之间,侧向的两个控制输入之间,纵向和侧向的控制输入之间等都存在耦合[5]。
(2) 飞行员操纵负担、身心负担等过大。在着舰最后的15~18 s内,会进行200~300次微调。飞行员在完成训练、战斗任务后,身心本就疲惫,而又要完成高难度、高危险性的着舰任务,会带来更大的身心负担,夜间尤其如此[2]。
(3) 着舰精度和可靠性不够高,复飞率高,白天约5%,夜间高达12%~15%[1]。着舰精度低和复飞率高不利于着舰的安全,增加了飞行员的心理负担,也降低了航母回收率和整体战斗力。
(4) 成本非常高昂。高难度的着舰对飞行员技能的要求很高,飞行员必须进行大量的陆上着舰练习(field carrier landing approaches,FCLP),以及进行岸基和舰基的着舰认证(carrier qualification,CQ)。美国海军的研究表明,6个航母战斗群的FCLPs和CQ的成本高达10亿美元/年,并且这只是计算了飞行小时和舰载机使用寿命的折合成本[6]。
虽然后来有的舰载机装备了直接升力控制技术(direct lift control,DLC)[2,7],或实现了垂直/短距起降(vertical and short take-off and landing,V/STOL)的着舰[8-13],但是实际的着舰并没有得到根本突破。DLC一般很少被用到,原因见下文。而V/STOL着舰有很多缺点,如限制了舰载机的载油、载弹量等,因此并不是主流的着舰方式,如F-35C舰载机具备V/STOL着舰能力,但是依然选择下滑着舰。
因此,美国从2014年开始开展舰载机精密进近与着舰的增强引导综合控制技术(maritime augmented guidance with integrated controls for carrier approach and recovery precision enabling technology,MAGIC CARPET)项目,该项目在2015年首次试飞成功。MAGIC CARPET极大简化了着舰最后15~18 s的操纵,使飞行员操纵次数从300次降至10余次,并且大幅地提高了着舰的安全性和成功率,飞行员只需要对操纵杆进行微调,即可实现下滑道和对中的误差修正,因此被认为是着舰的“游戏规则改变者”[5,14-15]。
文献[5,14-18]介绍了MAGIC CARPET的基本情况,本文在此基础上,深入分析MAGIC CARPET着舰技术的内在机理等。本文首先介绍MAGIC CARPET的发展情况;其次分析其设计思想和关键技术、控制结构和算法、试飞验证和试飞结论;然后分析MAGIC CARPET存在的几方面不足,并提出改进方案;最后进行了总结和展望。
1 MAGIC CARPET的发展情况
20世纪70年代开始,美国与英国国防部针对短距起飞/垂直降落(short take-off and vertical landing,STOVL)飞机,合作开展了矢量推力飞机先进控制(vectored-thrust aircraft advanced control,VAAC)项目[8-13],初衷是为了减轻飞行员负担和提高操纵品质。VAAC项目中提出了统一STOVL控制的思想,F-35B采用了这一思想,并于2011年10月,在“黄蜂号”号航母上完成了测试验证[8-13]。
VAAC项目的成功启示了美国海军,美国海军因此开始考虑,是否可以对难度更大的固定翼飞机下滑着舰,进行类似于VAAC项目的简化,以同样达到减轻飞行员负担的效果。美国海军研究办公室(office of naval research,ONR)给海军航空系统司令部(naval air systems command,NAVAIR)提供了约20万美元的种子基金,用于验证VACC概念在着舰上的潜力,这个项目的名字就是MAGIC CARPET[5]。最初的控制设想是要实现下滑和对中的直接控制和解耦控制,同时又控制好进场迎角。MAGIC CARPET最初的研究结果,得到了美国海军很大的肯定。因此该项目又得到了额外的研究基金,并用于控制律的成熟和平显技术的开发。
2014年1月,NAVAIR的F/A-18E/F项目办公室与波音公司订立合同,双方正式开始在F/A-18E/F平台下开展MAGIC CARPET项目。NAVAIR向波音公司提出了F/A-18E/F具体的改进方案和控制律要求。并且共同完成了软件集成测试以及硬件的在回路测试等[5]。
2015年4月20-23日,VX-23 F/A-18E/F飞行中队,在“布什”号(CVN77)航母上首次试验MAGIC CARPET技术[5,15-16]。2016年6月23-30日在“华盛顿”号(CVN73)上,由VX-23空中测试和评估中队测试首个版本(H-10版),在598次的着舰测试中,只发生一次脱钩情况。2016年秋天,将发布H-10+阶段性软件版本,并将部署到舰队进行试验。2017年5月3-4日,测试H-12版,并将MAGIC CARPET更名为精确着舰模式(precision landing mode,PLM)。预计在2018年秋天试验正式版本(H-14版)。H-14版计划于2019年全面推广到F/A-18E/F舰载战斗机中队和EA-18G舰载电子战飞机中队,使其具有完备的着舰能力。2019年交付的版本还将引入失效模式,即在油门控制系统故障、导航系统失效、或者机翼损坏等情况下,仍然能够实现安全着舰[15-18]。
2 MAGIC CARPET的关键技术分析
MAGIC CARPET系统的关键技术包括[5,14-18]综合直接升力控制(integrated direct lift control,IDLC)、飞行轨迹角速率控制、飞行轨迹增量控制和改进的平视显示器(head up display,HUD)。另外,H-14正式版本中,还提供很强的故障容错能力。单独使用这些技术中的某一个,其作用是很有限的,而这些技术具有很强的整体性,能有机结合起来,共同让着舰效果得到了根本的改变。
2.1 IDLC技术
2.1.1 IDLC的基本情况
可以肯定,着舰性能的突破,必须要利用直接升力进行下滑控制,而其他着舰方式并不具备这样的潜力,分析如下:
(1) 对于常规基于改变姿态的下滑着舰,无论是人工的backside操纵,还是自动着舰采用的Hdot控制[1],都没有实现根本的突破;
(2) STOVL着舰不是主流着舰方式,因为飞机载荷(载弹、载油等)受限很大。
F-8、F-14舰载机都安装了直接升力控制(direct lift control,DLC),然而下滑控制仍然由油门和平尾来主导,DLC只是一个从属和辅助的角色,甚至连辅助作用都没有起到,飞行员很少利用DLC。这是因为纵向中额外增加了一个控制装置——DLC指轮,并且驾驶杆、油门、DLC三者在操纵上还具有较强的相互耦合,共同控制下滑道和迎角。这很容易导致飞行员的操纵混乱,对于很多飞行员来说,在时间很紧的着舰过程中,很难有效地协调好这3种控制输入,而实际中只有少数操纵熟练的飞行员,才会偶尔用到DLC[2]。
因此,只有解决DLC的实际问题,才能让DLC真正实用并成为主导。2001年,Lockheed Martin公司在联合攻击战斗机(joint strike fighter,JSF)项目中,提出了IDLC的设想[19-20],并用X-35C飞机(F-35C的验证机)进行了岸基试飞验证,最后将IDLC配置在F-35C上。IDLC舍弃了以往的DLC指轮,而由飞控计算机来控制直接升力操纵面—后缘襟翼和同步偏转副翼,飞控计算机接受飞行员的油门输入(人工油门模态),或者俯仰杆输入(自动油门模态)。本质上,IDLC控制采用了隐藏控制策略,即是将DLC隐藏在飞控系统的底层。
可以看出,JSF项目中的IDLC隐藏控制策略和VAAC项目中的统一STOVL控制策略,两者的思想基本是一致的,都是要对底层进行隐藏和封装,并在此基础上实现统一和综合的控制。
MAGIC CARPET项目借鉴了VAAC项目和JSF项目的设计理念,并在F/A-18E/F舰载机上加装了IDLC。F/A-18E/F的IDLC操纵面是开缝后缘襟翼和同步偏转副翼,这比X-35C的简单副翼具有更好的升力效应。纵向杆通过调节襟翼和副翼来获得直接气动升力,并用平尾来抵消纵向俯仰力矩,油门可选用人工油门或自动油门。F/A-18E/F的IDLC有3种基本的配置[5],当采用上方全襟翼配置时,襟翼和副翼都为40°;当采用下方配置时,襟翼和副翼分别为30°、25°。当采用中间配置时,襟翼和副翼分别为38°、29°。另外,为了增加IDLC的气动升力效率,F/A-18E/F的着舰迎角也从以前的8.1°增加到了9.1°[14],且并没有影响飞行员的视场[5]。
2.1.2 IDLC的着舰性能分析
由IDLC主导的下滑控制,会让着舰产生质的飞跃,很多方面会因此得到突破。
(1) 下滑偏差纠正很快
IDLC的下滑偏差纠正很快,这对着舰非常有利,IDLC快速纠偏的原因可以总结为两点。
1) IDLC产生法向过载的潜力很大
如图1所示,对于F/A-18E/F,当襟翼和副翼从中间配置(分别为38°和29°)偏转到向上配置(分别是40°和40°)时,所带来的升力增加量,等于襟翼和副翼在中立位置不动而迎角增加3°所带来的升力增加量[5]。同样,襟翼和副翼从中间配置偏转到向下配置(分别是30°和25°)时,即等价于迎角减少了3°[5]。

图1 F/A-18E/F的IDLC升力系数Fig.1 IDLC lift coefficient change of F/A-18E/F aircraft
因此,可以算出上述的升力变化比例。设中立位置时的升力是L。
L=QSCL(α,δH,δIDLC)
(1)
式中,CL,α,δH,δIDLC分别是升力系数、迎角、平尾偏角、IDLC操纵面偏角。
当迎角于着舰配平迎角附近变化时,升力系数和迎角成线性关系,有

(2)

(3)
因此有
(4)
F/A-18E/F的零升迎角α0约-4°,因此,当α=9.1°,Δα=3°时,ΔL/L=23%,即从中立位置偏转到上方配置或下方配置,可以让升力变化23%。而最初的F/A-18E/F离线模拟显示[5],其IDLC最大能够产生±0.1g的法向加速度变化。由以上可知,IDLC在着舰进近条件下的升力增量的幅值潜力非常大。
2) IDLC改变轨迹的相位滞后大大减小

F/A-18E/F的IDLC改变升力时,后缘襟翼偏转的角速率限制是15°/s,在0.3 s内的可以偏转到向上配置的角度,大幅的直接升力能很快建立[5]。而对于不采用IDLC的常规情况,迎角需要通过俯仰角来建立。这种情况下,即使不考虑平尾动力学、平尾速率限制等实际情况,要想在0.3 s 内达到同等的升力(即迎角3°增量),就必须要求俯仰角速率在0.9°/s。而常规着舰方式下的俯仰角速率指令限幅通常在3°/s,且俯仰角回路的带宽一般是1/3 Hz。因此,即使不考虑平尾动力学、平尾速率限制等实际情况,至少也要1 s才能达到同等的升力。IDLC的升力建立速度远快于常规情况。
(2) 舰尾流抑制和下滑道保持的能力强
部分原因同上,另外可从物理过程上分析。舰尾流对飞机纵向的影响主要是在法向上,且一定范围内,可以等效为迎角的变化。当遇到舰尾流时,IDLC舵面的偏转可以直接抵消掉舰尾流引起的法向过载变化,迅速配平纵向的力,相位滞后很小,因此舰尾流对飞机的轨迹和高度变化影响较小。
而如果不采用IDLC,那么轨迹角和高度会发生较大变化,并在控制的作用下飞机会反复振荡来修正误差。另外,当着舰时风场的变化频率高于轨迹和高度回路的带宽时,那么舰尾流的抑制是很困难的,甚至是无效的。
(3) 不会出现“负调”现象
常规的轨迹和高度控制时,会出现初始的反向响应现象(又称负调现象)[22],这不利于着舰的迅速精确控制,甚至在飞跃舰尾时引发危险。而IDLC下,不会出现这种现象。
(4) 升阻比的提高和轨迹稳定性的恢复
在低动压着舰下,飞机的动力学一般处于反区,这时飞机的速度和轨迹会不稳定。因此,着舰和一般飞行任务的控制有一点不同,即必须有发动机的动力补偿,才能恢复轨迹稳定性和进行轨迹控制。而在IDLC下,一方面明显提高了升力系数,另一方面又明显降低了总的阻力。升阻比会提高,能让轨迹稳定性得到会恢复[23]。
(5) 迎角能很好地保持
迎角对于舰载机整体的动力学影响很大。常规飞机的姿态和轨迹是耦合的,因此轨迹的修正必然影响到姿态和迎角。而IDLC允许在姿态和迎角不变的情况下,控制轨迹和高度。
(6) 速度能很好地保持
速度是着舰很关键的一个变量。以往常规人工着舰中,切向和法向是耦合的,速度并不能理想地保持好。而常规着舰下,即使采用自动油门保持速度的控制策略,效果也很有限;这是因为在舰尾流干扰等情况下,油门、发动机推力和速度等的变化频率较高,飞行员会反映自动油门有时并不好用。
当采用IDLC时,迎角能很好保持,阻力变化很小,进而,下滑控制对速度的影响很小。例如,F/A-18E/F襟翼和襟副翼从全襟翼状态偏转到中间位置时,即使不采用自动油门保持速度,进近速度也只增加4~5 knot(2.06~2.57 m/s),相对于F/A-18E/F的136 knot(70 m/s)的着舰速度,变化很小[5]。另外,美军试飞员反映:与以往着舰相比,MAGIC CARPET能更好地稳定功率和油门[18],这说明,着舰的速度和迎角都能很好地保持。
2.2 飞行轨迹角速率控制模态
飞行轨迹角速率控制模态[5]下,飞行员根据改进的菲涅耳透镜光学着舰系统(improved Fresnel lens optical landing system,IFLOLS)的光学引导,以及惯导系统计算的轨迹角,来进行飞机轨迹角速率控制。VAAC项目中的STOVL控制采用过这种模态[8-9];而F/A-18E/F先前也有这种模态,也即轨迹角保持(flight path angle hold,FPAH),即在FPAH下,杆回时,轨迹角速率为0,轨迹能保持不变。先前的FPAH是在常规姿态动力学的基础上实现的,而MAGIC CARPET的飞行轨迹角速率控制概念,则是将IDLC加入到FPAH中,从而有着质的不同,大幅地提高了轨迹响应带宽。
该模态[5]下,当杆纵向位移超过±1 inches (2.539 cm)时,俯仰角和轨迹会以相同的速率进行改变,并且时间上和相位上可以几乎完全同步,而这在常规控制(无IDLC)下是不可能实现的。这样的好处如下:
(1) 让迎角始终保持在基准配平值;
(2) 迎角保持能让FPAH下的轨迹响应更快,效果更好。
该模态下,当杆纵向位移超过±2 inches (5.078 cm)时,俯仰角速率和轨迹角速率不再相同,此时将产生额外的俯仰角速率,因而迎角也不再保持[5]。这样设计优点如下:①能应对一些紧急的或机动的情况,如着舰复飞等;②能限制正常情况下的轨迹角速率和俯仰角速率。这是因为在正常情况下,如果位移超过±2 inches,飞行员就能大致感受到俯仰角和轨迹角的速率不同,也能从仪表中观察到迎角的变化,从而飞行员就会减小杆位移,因此,这种设计下,轨迹角速率和俯仰角速率就巧妙地被限制在一个杆位移为±2 inches的死区内。
该模态能有效地进行着舰控制。例如,舰载机从平飞状态转入到下滑着舰状态时,就需要轨迹角从0°尽快转到期望下滑轨迹角。这时,飞行员只需要进行两次杆输入,即可完成轨迹的转化。飞行员第一次输入是推杆,来让轨迹向下偏转;第二次输入是当飞机下滑道偏差快接近于0的时候,拉杆并小幅修正,从而捕获IFLOLS下滑道;最后松杆,这样轨迹角就保持在当前值,进行稳态下滑[5]。当出现下滑中出现下滑道偏差时候,同样也只需要进行两杆的输入进行修正。可见,该模态下,飞行员的负担得到了很大的降低。MAGIC CARPET试飞显示,对于实际中所有的标称或非标称的进近着舰情况,IDLC基础上的FPAH模态,可以满意地修正轨迹。
2.3 飞行轨迹增量控制模态
飞行轨迹增量控制模态,又称DP模态[5]。这种模态下,当纵向杆偏离中心位置时,轨迹会进行相应地修正;而当纵向杆处在中心位置时,飞行控制系统会根据IFLOLS光学下滑道和飞行员输入的航母速度,计算出着舰的基准轨迹,并控制飞机沿着这个基准轨迹飞行。
图2是IFLOLS引导着舰示意图[1,24],其中,σ是IFLOLS光学下滑道与海平面的夹角,σ通常是3.5°,在甲板风很大时为4°;φ为航母航向和甲板中心线夹角。IFLOLS光学下滑道是随着舰船一起运动,飞机飞行轨迹与下滑道并不相同,而是和船速相关,当船速增加时,基准飞行轨迹会减小,以让飞行员的眼睛能始终保持在固定的IFLOLS光学下滑道上。

图2 IFLOLS光学引导着舰Fig.2 IFLOLS carrier landing
DP模态只在着舰的下滑阶段接通使用。DP模态下,如果存在下滑偏差,这时飞行员会从IFLOLS观察到,IFLOLS“肉球”相对于基准光存在偏差,如图3所示[1]。
DP模态下,飞行员会根据这个偏差的极性和大小,来输入相应极性和大小的稳态杆指令,进而成比例地控制轨迹角增量[5]。从而,飞机会不断纠正下滑偏差,“肉球”会不断接近基准光,并且,“肉球”的移动速度与飞行员的杆输入幅度之间是线性和比例的关系。这种比例关系很直观明了,也非常有利于飞行员下滑控制;而在以往的常规控制中,杆输入和“肉球”移动速度并不是上述的线性关系。当“肉球”快要接近基准光球的中心时,这时飞行员松开纵向杆,飞行控制系统就会根据航母的速度,计算基准轨迹,并控制飞机自动返回和收敛到IFLOLS下滑道上。
DP模态的优点可以总结如下:
(1) DP模态下,只需进行一次杆输入就可以修正下滑道偏差,且飞行员松杆后飞机能自动收敛到在下滑道上,飞行员不需要考虑下滑道的重新捕获和保持,这比飞行轨迹角速率控制模态还要简单;
(2) DP模态下,杆输入量和肉球移动速度成正比,也即与下滑道修正速率成正比,有利于飞行员观察和操纵;
(3) DP模态下,飞行员同样可以不用关心迎角和速度的情况(分析见前文);
(4) DP模态下,侧向滚转操纵、对中修正等对纵向动力学是解耦的,飞行员不用考虑侧向操纵对下滑道修正的影响,从而简化了纵向操纵;
(5) DP模态下,侧向操纵的性能明显提高,由于飞行员纵向操纵的负担大幅降低,进而飞行员有很多剩余的精力和时间来进行侧向修正,因此即使不对侧向的控制律进行改进,着舰侧向对中的效果也会大幅地改善。
综上,DP模态极大地降低了飞行员的负担,且控制效果进一步提升。
2.4 平视显示符号
2.4.1 基本情况
MAGIC CARPET项目对F/A-18E/F的HUD进行了改进,使显示技术与控制技术有机结合在成一个整体,从而充分发挥MAGIC CARPET的着舰控制性能。MAGIC CARPET的HUD设计参考了VAAC项目的基本概念,并在此基础上进行了扩展和改进,设计要求如下:
(1) 能为飞行员提供控制所需要的信息,如控制参数误差、误差变化、模态接通状态等;
(2) 让飞行员有情景感,以让飞行员更有效率、精确、可重复地进行下滑道和误差的纠正;
(3) 显示是直观的,且与控制模态相一致,能根据任务进行裁剪。
VAAC项目的HUD,还使用了相对于舰船的显示符号[5,25]的策略,如提供舰船相对位置,舰船相对速度,以及根据舰速来确定补偿量等。VAAC项目的HUD相对显示策略用于短距起降,MAGIC CARPET项目则将其扩展到固定翼飞机着舰[5]。HUD显示中,会根据控制律的具体模态,来提供改进的下滑道误差、对中误差、指令幅值、特殊的情景感知等。
2.4.2 工作原理
图4是F/A-18E/F在DP模态下的HUD显示[5]。图中的HUD具有很强的情景感,且有几个很显著的地方:下滑道基准线(glide slope reference line, GSRL)、相对于舰船的速度矢量(ship relative velocity vector, SRVV)、船速,以及控制模态等。GSRL在HUD中是一个固定的短划线,GSRL表示与IFLOLS光学下滑道平行的下滑线。需要明确的是:GSRL、SRVV、下滑线等都是相对于航母(而不是相对于地面惯性坐标系)的概念。文献[9]有类似的显示符号,但是并没有采用相对显示的策略,也没有与着舰结合。

图4 MAGIC CARPET着舰的HUD显示Fig.4 HUD symbology of F/A-18E/F MAGIC CARPETcarrier landing
飞行员可以根据HUD的显示,很直观地判断出飞机的下滑状态。当SRVV和GSRL重合时,也表示当前飞机的下滑线平行于IFLOLS光学下滑道;而当SRVV位于GSRL的下方时,表示当前的下滑线比IFLOLS下滑道要更陡,也即飞机下沉速度大于基准下沉速度。当GSRL与IFLOLS基准光重合时,表示飞机的空间位置正处于IFLOLS下滑道上;而当GSRL位于IFLOLS基准光的上方时,表示当前飞机的高度高于下滑道[5,25]。因此,综合可知,只有当SRVV、GSRL和IFLOLS基准光都重合的时候,才表示飞机在沿着光学下滑,即此时飞机位置和下滑线都是在下滑道上。
飞行员可以根据HUD的显示,很轻松地修正下滑。例如,当飞机的高度高于下滑道时,就会显示GSRL位于IFLOLS基准灯的上方。此时,飞行员就必须推杆操纵飞机,让SRVV位于GSRL的下方,即让下滑线比IFLOLS下滑道更陡,这时飞机开始修正下滑偏。并且,SRVV与GSRL的距离越大,表明下滑偏差修正得越快。当GSRL快要与IFLOLS基准灯重合时,飞行员再操纵飞机,让SRVV重新回到GSRL上,最终当SRVV、GSRL和IFLOLS基准灯重合在一起,表明飞机重新回到下滑道上[5,9,25]。
DP控制模态和HUD的结合,会让下滑修正更加简单。飞行员只需根据GSRL和IFLOLS基准光的误差情况,给一个稳态的推杆输入即可,GSRL就会向IFLOLS基准灯匀速移动,且移动速度与推杆幅度成正比。当GSRL快要接近IFLOLS基准光时,飞行员只需松杆就可以了,飞控系统会根据当前的船速,自动让飞机的位置和轨迹都收敛到下滑道。
3 MAGIC CARPET的控制结构分析
3.1 舰载机纵向运动模型分析
舰载机纵向方程组:
(5)
式中,h,V,γ,α,θ,θT,q,T,D,L,M,CD,CL,δH,δIDLC分别为高度、速度、轨迹角、迎角、俯仰角、发动机安装角、俯仰角速率、推力、阻力、升力、俯仰力矩、阻力系数、升力系数、平尾偏角、IDLC操纵面偏角。
图5为下滑误差修正的几何关系图,由图5可以推导IFLOLS引导运动学[1]。其中,Vship是航母航行速度;φ是航母航向和甲板中心线夹角;σ是IFLOLS下滑道角度;Γ是飞机仰角误差;γ为轨迹角;d为飞机与下滑道距离。

图5 下滑误差修正的几何关系Fig.5 Geometry of glide error correction
飞机接近基准IFLOLS下滑道的速度为

(σ+γ)-Vshipcosφsinσ=f5(·)
(6)
飞机地速在基准IFLOLS下滑道上的分量为

(σ+γ)-Vshipcosφcosσ]=f6(·)
(7)
有

(8)
所以,IFLOLS引导下的飞机仰角误差为
(9)
设IFLOLS的焦距是f,则飞行员看到的IFLOLS肉球偏差为
hball=fΓ
(10)
由式(5)~式(10),可得总的信号流图,如图6所示。
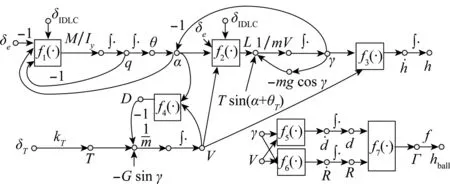
图6 飞机纵向运动信号流图Fig.6 Signal flow graph of aircraft longitudinal motion
3.2 飞行轨迹角速率控制模态的控制结构分析
(1) IDLC的控制方案
直接升力下的控制结构,可大体总结为两类。
1) 并行的控制
并行的控制结构,即飞行员的杆指令分别进入到直接升力操纵面和平尾的控制通道中,进而使这两种操纵面都在下滑高度控制回路中。F-14的DLC指轮控制[2],以及文献[1,21]的DLC控制结构等都属于这种控制结构。
2) 主控和辅控相结合的控制
这种控制结构,即直接力操纵面和平尾一个作主控,一个进行辅助。可以实现一些基本模态[22]:直接升力模态、垂直平移模态、俯仰轴指向模态。
理论上,着舰下的IDLC控制结构备选的有:并行控制结构、直接升力模态或垂直平移模态。这几种各有优缺点:并行控制结构有利于轨迹的快速修正,而不利于姿态和迎角保持;直接升力模态有利于迎角的保持,轨迹控制能力也较强;垂直平移模态有利于姿态的保持,但是不利于轨迹控制和迎角保持。
而MAGIC CARPET的IDLC采用了直接升力模态,且直接升力操纵面主控轨迹,而平尾通过保持迎角来辅助控制轨迹。这种方案对着舰更为有利。
(2) 自动油门控制的方案
自动油门控制的控制方案可以选择速度保持/控制、迎角保持/控制、轨迹控制等,且各有优点。但MAGIC CARPET的自动油门控制应该选用速度保持/控制。原因如下:
1) 这种方案下,切向和法向的操纵是解耦的,符合减轻飞行员负担的理念;
2) 下滑修正时,势能变化会干扰动能,这种方案能更好地保持速度;
3) 这种方案能让触舰垂直速度统计分布更紧;
4) IDLC会让自动油门的速度保持很好;
5) 平尾的迎角保持比油门更有效,因此不需要发动机来保持;
6) IDLC的轨迹控制比发动机更快,因此不需要backside操纵方式。
(3) 轨迹速率控制
/V=

(11)
由图6和式(11)可知:轨迹角速率(或法向总过载ny)在相位上超前于IDLC操纵面。因此,通过推导或仿真(此处省略)可以得到以下结论:
1) 由于相位不同,因此IDLC无法用前馈来控制轨迹角速率,必须采用反馈控制;
2) 由于轨迹角速率在相位上超前于IDLC操纵面,因此比例(proportion,P)控制或比例微分(porportion, differentiation,PD)控制轨迹角速率都是无效的;
3) 积分(integration,I)控制或比例积分(PI)控制是有效的,而PI的控制效果更好,且能减小I控制过大的相位滞后;
4) 由于相位超前的原因,即使控制律包含积分器,也难以进行轨迹角速率精确控制,不过实际中轨迹角速率并不需要精确控制;
5) 采用反馈+PI控制时,当杆指令为0时,轨迹角速率能达到精确为0,这对该模态的控制很重要;
6) 采用反馈+PI控制时,轨迹角速率控制的闭环相位滞后始终小于90°,响应非常快。
综上,应该采用反馈+PI控制,且积分器的增益需要较大。另外,由于着舰中会有风的干扰,因此不能通过俯仰角速率传感器和迎角角速率传感器,来得到轨迹角速率。而应该采用过载传感器的信号来计算轨迹角速率,如式(11)所示。
(4) 控制结构图

平尾通道的作用:平衡俯仰力矩、保持迎角、以及紧急情况下俯仰控制等。由于图6中,着舰配平迎角会正反馈影响飞机动力学(纵向静不稳定),因此配平量δH0来抵消迎角的影响。俯仰角速率q反馈增加阻尼。为了让迎角能精确保持在着舰迎角下,采用PI控制。图6中,δIDLC所生成的俯仰力矩干扰了迎角保持,因此图7引入δIDLC信号来抵消这种干扰。另外,为了应对紧急情况,当杆位移大于2 inches时,接通纵向杆的指令。
油门通道,用PI控制保持速度。δT0是着舰下的配平油门,用于抵消切向力,让飞机保持匀速。另外,由图6可知,当轨迹角γ有增量Δγ时候,会产生较大的GΔγ的干扰,因此引入轨迹角γ反馈,来提前消除这种耦合。
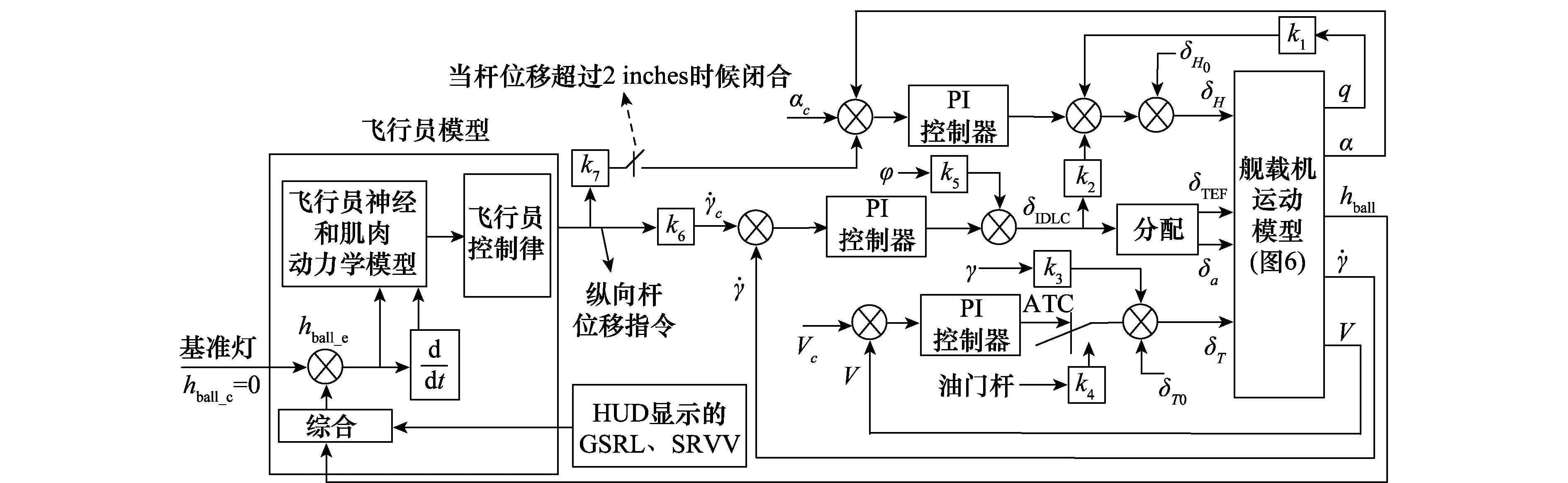
图7 飞行轨迹角速率控制模态的控制结构Fig.7 Control structure of flight path rate command mode
飞行员的神经和肌肉动力学可以认为是高阶惯性环节和延时环节等的组成。而该模态下的飞行员控制律,从控制上理解,可认为包含了下滑引导和轨迹控制两部分。
3.3 DP模态的控制结构分析
(1) 控制结构图
DP模态下,飞行员推拉杆时修正轨迹,而杆回中时保持在基准的下滑线上。可以推知:
1) DP模态提高了飞行员的控制层级,让飞行员直接控制轨迹;
2) 轨迹指令肯定是由两部分组成的:一部分是基准指令(根据船速计算得到),另一部分是增量指令(由纵向杆给出,此时杆指令和轨迹角增量指令成比例);
3) 为了精确控制轨迹,可采用PI控制;
4) DP模态有两种方案可选:一是在轨迹角速率控制的基础上进行;二是不以轨迹速率反馈为内回路,而直接进行轨迹控制。前者有利于模态的瞬态切换,后者有利于控制轨迹和减小相位滞后。这里选前者。
图8中,DP模态以飞行轨迹角速率控制模态为底层。当DP模态接通时,轨迹角反馈到飞控系统,杆直接控制轨迹增量。
当飞行员推或拉杆时,相当于闭合了IFLOLS引导控制回路。飞行员通过观察IFLOLS “肉球”或HUD来获得下滑偏差信息,并计算出一个稳态的杆位移。
当飞行员松杆时,轨迹角增量指令Δγc为0,此时相当于断开了IFLOLS引导回路,飞机在轨迹基准指令γref的控制下下滑。
杆位移指令控制律:
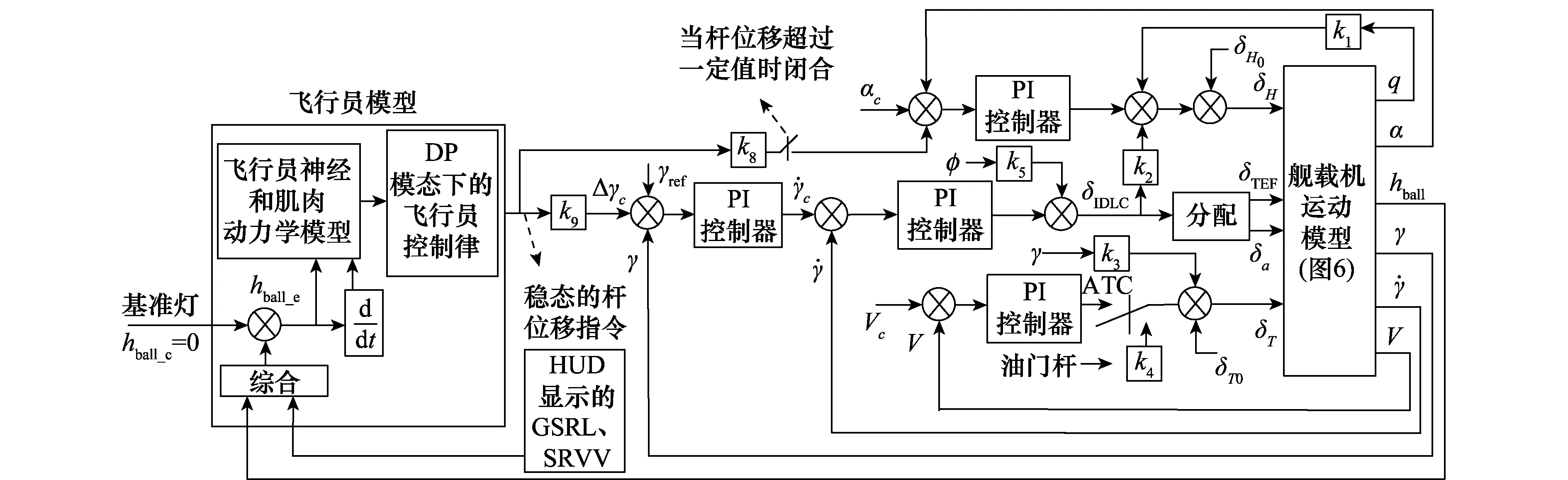
图8 DP模态控制结构Fig.8 Control structure of DP mode
(2) 轨迹基准指令计算
如图9所示,航母航行速度是Vship,斜甲板的速度分量是Vshipcosφ。飞机地速V,轨迹角γ,下滑道(相对于航母)是σ。则由矢量三角形法则[24],有
(12)
由于着舰下,在σ和γp都很小(|γ|小于4°,σ小于5°),有
sin(σ+γp)≈σ+γp, sinσ≈σ

(13)
因此,如果F/A-18E/F的着舰地速V=70 m/s时,光学下滑道σ=4°,Vship=25 kn (即12.86 m/s),φ=11°时,γ=-3.28°,即此时基准下滑指令是γref=-3.28°。
(3) 轨迹角信号的实现
第1种方案是由γ(t)=θ(t)-α(t)得到。由于干扰风引起的迎角分量,与地速矢量引起的迎角分量在一个数量级上,且迎角又受滚转影响,因此这种方案不可行。

图9 飞行轨迹计算Fig.9 Flight path calculation

V地速=V空速-V干扰≈V空速
(14)

(15)
这种方案具有一定可行性,但是气流对轨迹计算的微小干扰需要驾驶杆来进行微小调整,增加了飞行员负担。

(4) 松杆后的下滑道捕获能力
松杆后的下滑道重新捕获是DP模态很大的特色。下面讨论其有效性。
由于IDLC下的下滑道保持能力很好,因此下滑偏差一般很小,进而可知DP模态下的飞行员给出的轨迹角增量指令Δγc很小。又由于基准轨迹角γref一般在-3.5°左右,因此可假设Δγc比γref小一个数量级,即设Δγc=0.3°。
则松杆瞬间的垂直速度偏差为
ΔV⊥=Vsin(γref+Δγ)-Vsinγref≈VΔγ=VΔγc
(16)
设垂直加速度为a⊥,则飞机在时间t=ΔV⊥/a⊥后,轨迹角等于基准值,此时高度变化了,表达式为
s=V2Δγ2/2a⊥
(17)
当a⊥=0.1g,Δγc=0.3/57.3 rad,V=70 m/s时,s=0.067 m。
因此这种情况下:如果飞行员在高度误差为0.067 m时松杆,飞机恰好进入IFLOLS下滑道;而如果在下滑道时才松杆,则最后下滑线的误差有0.067 m。着舰规范[1-2]规定纵向误差小于12 m,可算出理想着舰点的高度误差应小于0.73 m,因此上述的0.067 m误差值很小。另外,又由于飞行员本身就是一个预测系统,会根据“肉球”的位置和移动速度大小进行预测,因此,这种情况下,最后的误差会比0.067 m还小。
可见,松杆后的下滑道捕获是有效的。并且,只有在IDLC下才能达到这样的效果。
4 试飞验证与结论
4.1 试飞验证
(1) 岸基试飞[5]
2015年的1月15日,NAVAIR开始了试飞计划。试飞主要采用了3种结构配置:①单一的中心线燃油箱;②最大化侧向非对称载荷;③ 5个外挂燃油箱。
2015年2月6日,NAVAIR进行了首次试飞,目的是调整各控制模态的增益。试飞条件:结构配置上采用中心线外挂载荷,进场迎角为9.1°,飞行高度3 000~5 000 ft。根据循序渐进的原则,首先测试飞行性能,然后测试DP控制模态下的标称进场,最后测试非标称进场。试飞很成功,飞行员反映控制精度高且工作负担低。
2015年3月23日,再次进行岸基试飞。结构配置上卸掉了中心线载荷。这次有5名试飞员和2架F/A-18E/F参与,对DP模态和飞行轨迹角速率模态,分别进行了71次、50次的进场飞行(包含标称和非标称条件)。这次试飞为后续的舰基试验提供了信心、着舰性能等基础。
(2) 舰基试飞[5,15-18]
2015年4月20-22日,在“华盛顿”号(CVN73)上进行了舰基试飞,同样有5名飞行员和2架F/A-18E/F参与。结构配置上卸掉了中心线载荷,试飞迎角9.1°,俯仰角6.1°,试验了各种的甲板风和舰尾流情况。为了进行统计和比较分析,进行了大量试飞,分别在已有人工油门控制模态、飞行轨迹角速率控制模态、DP模态下,各试飞199次、64次、117次。并且每种模态的试飞都进行了了标称和非标称条件下的下滑、对中的控制和纠偏等。2016年6月23-30日在“华盛顿”号(CVN73)上完成了全部试验,598次的测试中,只有一次脱钩情况发生。
4.2 试飞结论
(1) 操纵品质
试飞中各模态的操纵品质等级(handling qualities rating, HQR)都有很大的提高。飞行员用“游戏规则的改变者”来形容着舰修正。飞行员认为即使在大范围非标称情况下,也能轻易且高精度地完成下滑和对中的修正和保持。飞行员认为能很容易让下滑道保持在1/2和1个IFLOLS“肉球”以内,且侧向适度的滚转和纠偏并不会影响到“肉球”的稳定[5]。飞行控制系统能够最大程度地减小舰尾流和涡旋对下滑的影响。飞行员还认为在飞机越过舰尾的最后关头,还可以进行1~2次的下滑修正[5]。
飞行员反应了一点不足,即纵向杆到IDLC的控制梯度太陡峭。后期的试飞认为可以将原来的全襟翼配置变为半襟翼配置。
试飞中各模态的操纵情况并不一样[5]:①人工油门控制模态下,飞行员操纵纵向驾驶杆和油门幅度和频率都很大;②自动油门控制模态下,虽然飞行员不需要操纵油门,但是纵向杆的幅度、频率依然很大,和人工油门控制模态下相似;③飞行轨迹角速率控制模态下,纵向杆的幅度、频率都较大程度地降低;④DP模态下,纵向杆的幅度、次数、频率都减小到了最小,飞行员负担大幅减小。
所有飞行员都对HUD显示很满意。HUD提供了很好的情景感,且SRVV和GSRL的结合给飞行员为下滑和对中提供了很好的参考。改进后的座舱控制接口和HUD显示,能很大地提高着舰性能[5]。
(2) 触舰散布误差
试飞团队使用高速摄像技术来捕捉尾钩的着舰位置。统计显示,不同的初始条件下,着舰散布误差几乎没有区别。可见,优良的控制性能抵消了初始条件对着舰散布的影响。
统计显示,改进模态下的散布误差比以前人工控制模态要小[5]。纵向:以往人工着舰的标准差在39.3 ft;DP模态着舰点均差为0.4 ft,标准差是18.2 ft,着舰散布误差比以往降低了50%。侧向:以往着舰的标准差在3.6 ft;DP模态标准差2.2 ft。鉴于DP模态的优良性能,JSF项目团队也将DP模态嵌入到F-35C[5]。
2014年11月,JSF项目的F-35C在Nimitz号航母上试飞验证DP模态。虽然F-35C和F/A-18E/F的试飞,是在并行的两个项目之下,且试飞海域、海洋条件、航母、飞机、飞行员都不同,但是二者的试飞结果却惊人地一致。F-35C试飞的着舰标准差是19.1 ft[5]。
这可以说明:DP模态的纵向标准差潜力应该就在18.2 ft或19.1 ft附近。
(3) 触舰冲击载荷
以往着舰的垂直速度均值为11.84 ft/s,标准差为2.25 ft/s,分布很广,因此飞机的冲击载荷结构需要适应3 ft/s的标准差来设计。DP模态下,垂直速度均值为10.82 ft/s,标准差为1.10 ft/s,分布很紧[5]。
5 现有MAGIC CARPET的不足之处和改进建议
5.1 光学下滑道稳定方式
(1) 不足之处
常用的IFLOLS光波束稳定方案有角稳定、点稳定和惯性绝对稳定3种方式[1]。根据DP模态原理,可知MAGIC CARPET采用了惯性绝对稳定方式,即光波束在惯性空间内保持绝对稳定,不随甲板运动而运动。这最大程度地减轻飞行员的负担,但是缺点是会增加着舰散布误差的幅值。
(2) 改进建议
解决的方法可以有两种。
①始终采用惯性绝对稳定方式,但是在着舰的最后阶段,如飞跃舰尾时,由飞行员观察着舰点的运动情况,进行人
工补偿。MAGIC CARPET试飞中,飞行员从飞跃舰尾到最后触舰,仍然可以对飞机进行一杆到两杆的有效调节。因此认为,这种方案有一定的可行性。
②着舰前期采用惯性绝对稳定方式,而在最后着舰第12 s,转换为无沉浮补偿[1]的绝对稳定方式(波束只跟随甲板浮沉)。这借鉴了自动着舰的甲板运动补偿思想,能兼顾减小飞行员负担和减小着舰散布误差。具体可由舰上LSO决断,当飞机距离舰700 m左右时,LSO发出指令(手势,对讲机、电子按钮等形式),指令一方面让助降系统转化为无沉浮补偿的绝对稳定方式,另一方面无线电通知飞行员IFLOLS甲板运动已经接通。由于MAGIC CARPET技术下,LSO和飞行员的负担已经很大程度上减轻,所以采用这种方案有一定可行性。
5.2 侧向控制
(1) 不足之处
现有的MAGIC CARPET主要应用在纵向控制上,而没有应用在侧向控制上,其设计思想上认为:当飞行员能更轻松地控制纵向时,就会有更多剩余的精力时间来控制侧向,从而提高侧向的控制性能。
然而侧向的控制还是需要改进,原因如下:
1) 飞机的横航向具有很强的交联,飞行员还是需要综合操纵侧向杆和方向舵,负担较重;
2) 航母航行让甲板中心线的始终有一个横向的速度分量,为了跟踪甲板中心线,常规飞机要么通过侧航跟踪,要么通过滚转来实现侧滑跟踪。前者有航向角偏差,后者有滚转角偏差,这两种偏差对触舰拦阻都造成了影响甚至是危险;
3) 在舰尾流横向分量的作用之下,飞机要么通过侧航来消除尾流引起的侧滑角,要么通过滚转来抵消横向干扰力,同样影响触舰拦阻。
(2) 改进建议


图10 侧向DP模态控制结构Fig.10 Control structure of lateral DP mode
1) 采用综合直接侧力控制(integrated direct lateral force control,IDLFC),且采用鸭翼和方向舵来实现侧向直接力。这样实现了侧向的轨迹控制和姿态控制的解耦,可以在滚转角和航向角不变的情况下实现侧向控制。并且不额外增加指轮,而是用侧向杆来控制侧向直接力。
2) 侧向杆不再控制滚转角,而是直接控制侧向的轨迹角增量,以提升飞行员的控制层级。
3) 为了消除交联力矩对航向角和滚转角的影响,同样进行解耦设计,即分别用方向舵来稳定航向角,用差动副翼来稳定滚转角。
4) 为了应对紧急情况,同样允许在侧向杆指令大于某个幅值的时候,也让差动副翼有额外的偏转,来辅助进行侧向控制。
5) 侧向同样设置DP模态,基准侧滑指令同样根据飞行员输入的船速来计算得到。基准指令为
χref=-Vshipsinφ/V
(18)
6) 改进HUD符号。先前的HUD中,用固定的横向短划线表示纵向下滑道基准线,改进后可加上固定的竖向短划线表示侧向对中基准线(line-up reference line,LURL)。这样共同组成了十字型符号结构,并让SRVV能在这个结构移动。
5.3 兼容自动着舰模态
(1) 不足之处
现有的MAGIC CARPET只是人工着舰方式,可进一步扩展到自动着舰。
1) 采用MAGIC CARPET动力学结构和控制结构的飞机,在某些特殊情况下可能需要平稳切换到自动着舰模态。
2) 以往的自动着舰,都是基于常规动力学,着舰性能上存在瓶颈,飞行员对其信任度不够。
(2) 改进建议
1) 有两种成熟的引导方式可选:雷达引导[1]和舰上相对差分全球定位系统(shipboard relative global position system,SRGPS)引导[26]。可以认为,MAGIC CARPET(DP模态)+SRGPS是未来自动着舰的必然。原因:自动着舰可分为控制和引导两部分。控制部分,MAGIC CARPET综合了IDLC等多项技术;而引导部分,当前美国的SRGPS性能最好,是具有革新意义的下一代精密进近着舰系统,定位精度和着舰试飞性能都远超过雷达引导[26]。
2) 稳定性。无论是雷达引导,还是SRGPS引导,舰上都会有数据链信息发送到飞机上,以确定舰机相对位置。由于IDLC轨迹控制的带宽能比常规控制大一倍,因此同样的数据链和飞控延时,相位滞后也会大一倍。为了解决这个问题,需要减小延时,如美军最新的着舰战术瞄准网络技术数据链在100 n mile范围内延时只有2 ms。
5.4 操纵面
(1) 不足之处
现有的MAGIC CARPET采用的IDLC操纵面是襟翼和副翼,操纵面的气动效应和余度设计并不是最佳的。
(2) 改进建议
纵向可以进一步使用前缘襟翼,以抑制了大迎角下前缘处的气流分离,进而支持IDLC。还可以增加推力矢量控制,如美F-35C、F/A-18E/F同样也有推力矢量操纵面。增加的操纵面同样可以采用综合的设计思想,用纵向杆统一控制。
6 总结与展望
6.1 MAGIC CARPET的思想和方法总结
(1) 采用了综合、隐藏、统一的设计思想,这种思想可以总结为:对底层进行隐藏和封装,在上层实现统一和综合。IDLC将原有的驾驶杆和指轮两个控制输入,综合和统一为驾驶杆一个控制输入,并让直接力控制隐藏在控制的底层。从而让直接升力在着舰上真正实用,并成为主导,从而让着舰性能有了质的改变。
(2) 提升飞行员的着舰控制层级。飞行轨迹角速率控制模态、DP模态等将飞行员从常规的姿态控制层级,提升到轨迹控制层级,从而减少了飞行员负担。虽然已有的自动着舰中采用了垂直速率控制(相当于轨迹控制)的方法,但是改变并不彻底;只有让IDLC和轨迹直接控制相结合,才能让着舰性能有根本的改变。
(3) 提出了增量控制的思想。DP模态在IDLC的支持下,大幅地减少了飞行员负担并提高了着舰性能。飞行员操纵幅度很小,且飞行员一次杆输入就可以修正下滑误差。
(4) 采用了解耦的方法。进行了切向和法向的解耦(采用frontside操纵策略),并实现了侧向和纵向的解耦。
(5) 改进了HUD,使用了情景化设计方法和舰船相对显示符号的策略。并与DP模态兼容,很大地提升了着舰性能。
(6) 很强的故障容错能力。
(7) MAGIC CARPET中的技术具有很强的整体性。体现在两点:①单独采用某项技术不会产生明显的效果,但是整体性能上却有根本的改变;②各技术都以减少飞行员负担为出发点。
6.2 MAGIC CARPET优点总结
虽然MAGIC CARPET项目的初衷是降低飞行员着舰负担,但实际的优点却不知这点。
(1) 很大程度上降低了飞行员的着舰负担。常规着舰最后18 s,飞行员会进行从200~300次降微调,而MAGIC CARPET系统首次测试只需要20次微调,飞行员习惯后,甚至只需要10余次[18],且操纵幅度和操纵频率也大大降低。以往着舰中,只允许着舰指挥官和飞行员交流,以避免飞行员分散精力,而现在也允许舰员和工程师和飞行员进行交流。
(2) 大幅地降低了舰载机飞行员培训的经济、时间成本。舰队有更多财力来建设其他方面的战斗力,飞行员也有更多地时间和精力去训练战斗技能,舰载机的使用寿命也得到了提高。
(3) 着舰精度大幅提高。纵向误差稳定在均差0.4 ft、标准差18.2 ft的附近,精度提高了一倍。侧向标准差从3.6 ft减少到2.2 ft。
(4) 触舰垂直速度分布更紧,散布偏差减小了一倍,从而减小了对结构载荷的要求,也提升了舰载机使用寿命。
(5) 极大地减少了复飞率,提升了航母的回收效率和舰载机的出动架次率,从而增强了航母的整体作战能力。以往美军人工着舰复飞率:白天约5%,夜间高达12%~15%,着舰失败意味着需要等待下一次的着舰机会。若遇到燃油不足的情况,还需另外起飞加油机进行空中加油,这将极大地拉长舰载机起降时间。而MAGIC CARPET下的598次试飞中,仅出现1次复飞,从而能显著提升航母战斗力。另外,舰上无需过多的空中加油机。
6.3 展望
(1) MAGIC CARPET项目很重要的一个初衷,就是要提供简单直观、易学易操纵且精度很高的着舰控制,进而大幅减小飞行员负担和培训成本。这个想法应该是今后着舰技术发展的必然趋势,而MAGIC CARPET技术应该是今后人工着舰的趋势。
(2) MAGIC CARPET项目的设计思想和方法值得借鉴,且可以不局限于着舰技术本身,如可应用于旋翼机、固定翼飞机、推力矢量飞机等。
(3) 美军正开展的MAGIC CARPET技术依然存在一些不足之处,可以扬长避短,在其基础上进行改进(前文已分析)。
(4) MAGIC CARPET技术需要扩展到自动着舰,且MAGIC CARPET+SRGPS应该是今后自动着舰的一个趋势(前文已分析)。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年1期)2020-12-25
岷峨诗稿(2020年4期)2020-11-18
空间科学学报(2020年4期)2020-04-22
汽车电器(2018年8期)2018-08-25
汽车之友(2016年10期)2016-05-16
北京航空航天大学学报(2016年3期)2016-02-27
科技传播(2014年4期)2014-12-02
少年科学(2014年7期)2014-08-18
