基于邻域跟随与辨识的无人机集群控制与规避策略
2018-09-27 11:59:04张代兵李小民董海瑞杜占龙
系统工程与电子技术 2018年9期
毛 琼, 张代兵, 李小民,3, 董海瑞, 杜占龙
(1. 中国人民解放军陆军工程大学石家庄校区无人机工程系, 河北 石家庄 050003; 2. 国防科技大学 智能学院, 湖南 长沙 410073; 3. 石家庄铁道大学电气与电子工程学院, 河北 石家庄 050003)
0 引 言
多架无人机(unmanned aerial vehicles, UAVs)彼此协同完成军事目标打击、目标跟踪与侦察等任务可大幅度减少任务执行的时间、提高作战的效率和成功率[1-2]。随着作战环境的日趋复杂,空间无人机的数量和密度上升,强电磁环境易使无人机通信致盲以及潜在的突发障碍等问题给无人机集群的飞行控制与安全带来一系列挑战[3-4]。
无人机集群系统属于局部感知或通信的分布式体系结构,目前主要的控制方法有:基于局部规则的控制[5-7]、软控制[8-10]、领航跟随法[11-14]和人工势场法[15-23]。基于局部规则的控制方法最基础,能实现集群智能的涌现控制,但是难使集群涌现到期望的控制方向;软控制是在局部规则的基础上通过为集群加入一外部可控的无人机,引导群内其他无人机朝着人们期望的方向运动,文献[10]利用其成功实现了分群;领航控制法利用集群中信息丰富的无人机引导实现集群控制,文献[7]针对部分无人机获得航迹信息进行了研究,直接将掌握航迹信息的无人机设为领导者和不掌握航迹信息的无人机设为跟随者,没考虑无人机如何辨识谁是领导者的问题;人工势场法通过构建全局势场函数引导智能体向势能降低的方向运动,该方法简单实用,在避障方面有优势,但存在局部极值问题。
本文以上述方法为基础,研究了理想全通信环境下所有无人机都能获得目标航迹信息和电磁干扰环境下部分无人机能获得目标航迹信息条件下的集群控制方法。对于第一种情况,本文将局部规则与势场法融合改进引力和斥力函数,并结合软控制方法控制无人机涌现出群聚行为和使集群沿着指定的航迹运动,针对未知突发障碍,在有限视觉感知的基础上采取应急避障的方法处理,并借助于运动环境的动态性帮助无人机摆脱局部极值;对于第二种情况,在文献[7]的基础上采用邻域辨识的方法为未获得航迹信息的无人机选择跟随目标,构成局部的领航控制模式,使无人机逐渐聚集和沿着指定航迹飞行。
1 基于集群智能的UAVs系统建模
1.1 群内部成员模型
无人机集群属由N个无人机组成的分布式系统,每个无人机的运动可用一个6自由度的运动方程表示[15],经微分同胚[16]后可抽象为
,i=1,2,…,N
(1)
式中,Pi(x,y,z)表示无人机i的空间位置;vi表示速度;ai表示加速度。通过在制导系统环节设计加速度ai可控制无人机沿着预定路径飞行,其他交由自动驾驶仪完成。
此外,无人机飞行时存在如下约束:
(1) 加速度约束
(2)
式中,Amax为无人机的最大加速度。
(2) 速度约束

(3)
式中,Vmax为无人机的最大运动速度。
1.2 无人机的运动控制规则
本文研究的分布式无人机系统的整体运动受无人机运动规则控制,是无人机间局部交互产生的一种涌现行为。根据无人机行为交互对象的不同,可将集群内部无人机的运动分解为3个子目标:保持群聚、奔向目标和规避障碍,因此受邻近无人机群聚力、目标的吸引力与障碍的排斥力三者的综合作用,对无人机质量进行归一化处理后其运动控制量ai可表示为

(4)
式中,等号右侧第1项为目标吸引产生的控制分量;第2项为规避障碍的控制分量;第3项为同集群的其他邻居无人机j对无人机i产生的吸引控制分量;α为无人机能否正常接收目标航迹信息的标志,α=1表示无人机i能正常接收航迹信息,此时式(4)等号右侧第4项为0;α=0表示无人机i不能正常接收航迹信息,此时式(4)等号右侧第1项为0,第4项不为0,表示无人机i需从邻域内选择无人机G进行跟随;γ1、γ2和γ3为各个控制分量的权重,由于无人机i在接收不到目标航点的情况下把无人机G当做目标航点进行追随,所以式(4)等号右侧第1项和第4项的控制强度系数相同且均为γ1,集群内部无人机的运动控制主要通过设计ai实现。
1.2.1 群聚运动的控制
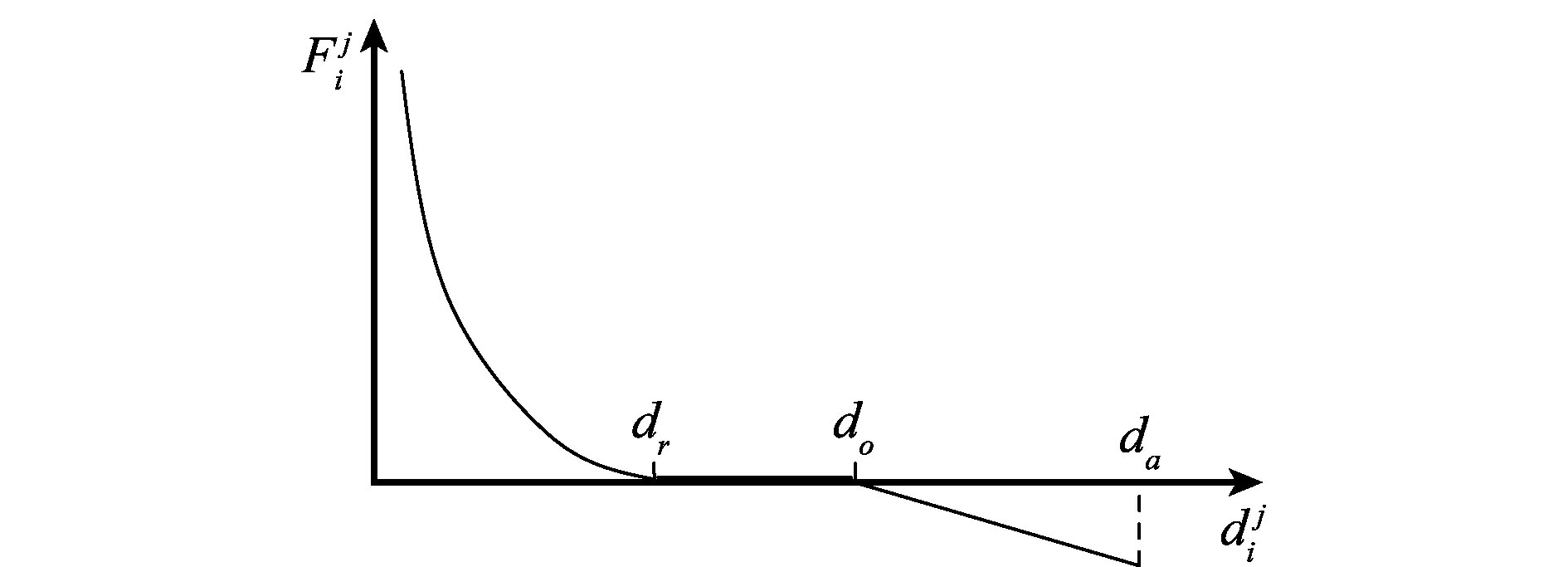
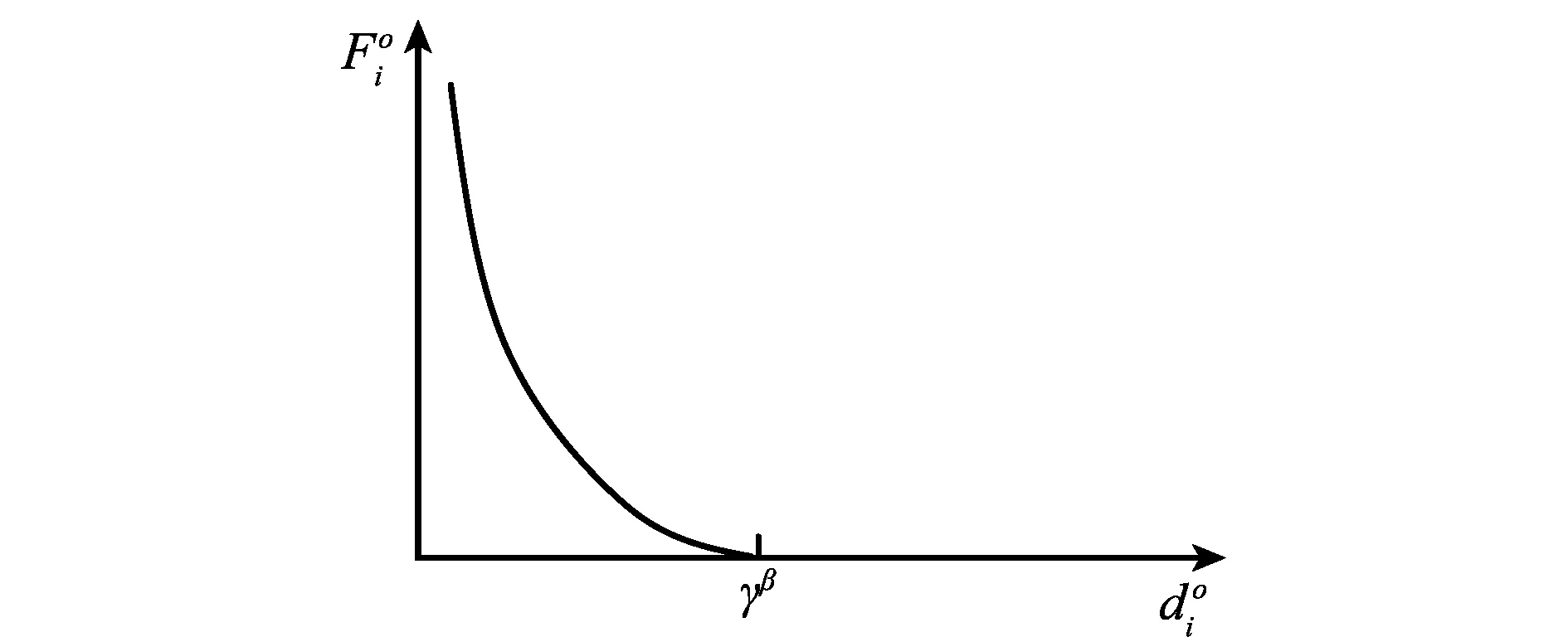
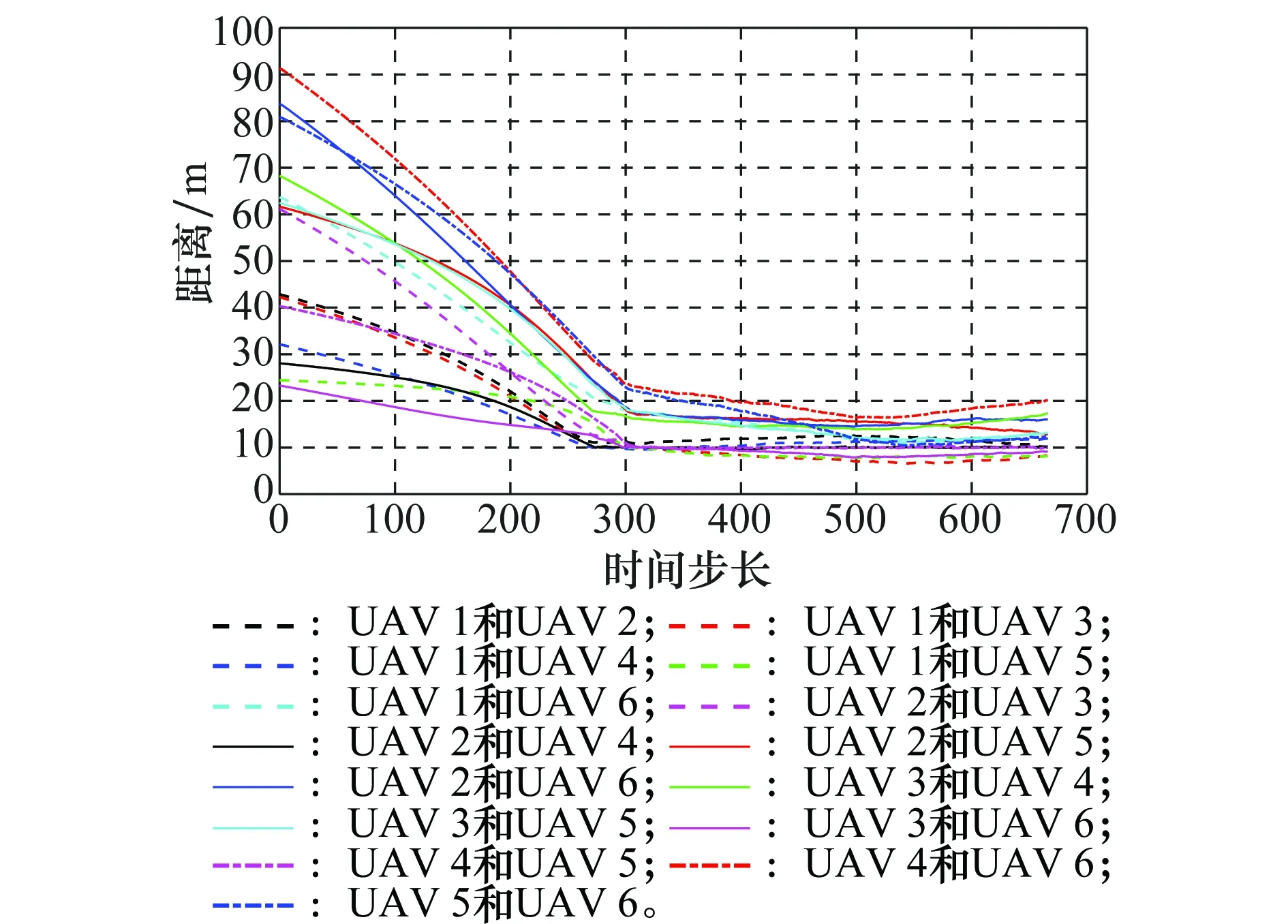
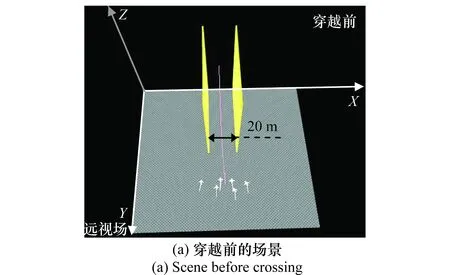
传统的基于局部规则的控制方法对控制无人机群聚效果明显,主要建立在排斥域、一致域和吸引域3个感知域的避撞、结队和聚集3个运动规则基础上。设无人机i通过机载传感器感知周围无人机的位置、速度,探测距离为da,其探测区域为以无人机i所在的位置为中心,da为半径构成的圆形区域,t时刻落在无人机i的探测区域内的无人机用集合Ni(t)表示。在该探测区域内,以dr和do为界(0 (5) (6) (7) (8) 图1 无人机i和无人机j之间的作用力Fig.1 Force between UAV i and UAV j 1.2.2 朝向目标的运动控制 为控制无人机集群前往目标区执行任务,首先将无人机集群作为一个整体进行航迹规划,以减少路径规划的复杂性;其次将航迹分解成一系列序列位置点Track={T1,T2,…,Tm};通过自动相关监视广播系统(automatic dependent surveillance broadcast,ADS-B)将上述序列位置点的位置和速度信息按着时间顺序向各架无人机播发,随着时间的推进,目标航点信息被更新,从而控制和引导集群成员沿着规划的路径飞行和到达目的地。该信息分发系统可布置于集群内部的任意一架无人机,也可布置在有人机或地面控制站,且布置在有人机或地面控制站时可灵活改变航点信息,提高集群控制的机动性和灵活性。根据机载广播式自动相关监测设备接收端(ADS-B IN)能否正常接收航点信息,可分为以下两种情况。 (1)所有无人机均可获得航点信息 (vi-vTk) (9) (10) (11) 图2 无人机与目标之间的作用力Fig.2 Force between the UAV and target (2) 少部分无人机可获得航点信息 由于强电磁干扰易使无人机的通信中断导致其不能获得目标航点信息,在此情况下需要寻找其他的途径以补偿目标信息缺失带来的风险,如借助于机载传感系统对附近其他无人机的位置和速度进行测量,此时未接收到航点信息的无人机在第1.2.1节的群聚作用下仍能继续维持群聚运动,但随着掌握航点信息无人机的比例下降到1/3以下时,无人机经常产生脱离集群的现象(文献[7]中描述),且随着掌握航点信息无人机的比例下降,集群内无人机飞行路径的平滑度大幅度下降,给集群的控制与安全带来了很大的困难。为改进该问题,文献[7]令领导者开启局部导航通信功能向周围无人机发送航点信息,这在复杂电磁干扰环境中不现实,本文提出基于机载探测系统的邻域感知与辨识的方法,帮助未接收到航点信息的无人机i从其邻域Ni(t)内捕捉运动变化最快的无人机G,即将其当做目标航点进行跟随。 (12) (13) (14) (15) 无人机与目标无人机之间的作用力如图3所示。 图3 无人机与目标无人机之间的作用力Fig.3 Force between the UAV and target UAV 1.2.3 规避障碍的运动控制 集群沿着预定航迹飞往目的地的过程中,会遇到障碍的威胁。无人机为保证自身的飞行安全,需要对障碍物进行规避。根据障碍事先是否已知可分为已知障碍威胁和未知障碍威胁。对于已知障碍威胁,可在航迹规划阶段进行初步处理,飞行过程中无人机主动进行规避;对于未知障碍威胁,则依赖于机载传感器的探测能力、计算机信息处理速度和执行机构的动作时间等众多因素。本文讨论未知威胁,为了与实际情况相符,设无人机i的探测距离为da,机载计算机信息处理和执行机构响应的时间总和为τ=0.25 s,无人机自探测到障碍的时刻起τ秒后立即采取相应的应急避障策略,二者之间通过式(16)斥力函数进行设计。 (16) (17) (18) 图4 无人机与障碍之间的作用力Fig.4 Force between the UAV and obstacle 对集群而言,如果集群内部无人机之间的距离保持不变,则说明其具有良好的稳定性和鲁棒性。为简化稳定性分析过程,本文首先考虑集群内部只有两架无人机i和j的情况,它们在彼此的可探测距离之内。设x1和x2为系统的两个状态变量,根据式(1)有 (19) 将两机视为一个系统,考虑系统内部状态的稳定性,由式(1)和式(4)得 (20) (21) 再利用式(7)求负梯度得 (22) 设李雅普诺夫函数为 (23) 对李雅普诺夫函数求导,得 (24) 将式(22)代入式(24),得 ≤0 (25) 由式(25)知,两机速度渐进趋于一致,即二机之间的距离也趋于一定值,系统达到稳定状态。 再次假设集群内部有3架无人机,编号分别为1、2、3,且各自在彼此的探测范围内。以无人机2为例进行稳定性分析,其邻居为1和3,按上述方法设状态变量为 则 (26) 设李雅普诺夫函数为 (27) 则 (28) 用式(26)代替式(28)中速度的一阶导数项得 (29) 令 (30) 设李雅普诺夫函数为 (31) 则 …+ (32) 同理,将式(30)代入式(32)得 ≤0 (33) 即系统稳定。 为方便对上述方法的控制效果进行分析,本文在Netlogo环境下进行了三维空间的无人机集群飞行与障碍规避仿真验证。由于本文提出的控制方法属于分布式的集群控制方法,集群内部的每个无人机成员依靠自身的机载传感器探测周围其他运动和静止目标,生成局部运动环境,并自动解算和生成相应的运动控制指令,控制自身行为。按着无人机能否接收航点信息,仿真实验主要从以下几方面展开。 情形1集群内部无人机均能获得实时航迹信息,飞行空间无障碍 图5 无人机群聚集和沿航迹飞行Fig.5 UAV individual gather and fly along the track 图6 无人机之间的距离Fig.6 Distance between UAVs 图5中红色曲线为预先规划的航迹,白色曲线为集群内部成员的飞行航迹,其初始位置随机,在接收到目标航点信息后朝目标位置飞行,逐渐靠近、聚集和形成一整体,并沿着航迹飞行,实现了集群的群聚和整体运动控制。 图6显示了任意两机间距离变化的情况,曲线的走向趋势表明:任意两机间的距离在初始时刻最大,随着时间的推移逐渐收敛至一恒定值,此时集群进入稳定状态。在该过程中,由于任意两机间的最小距离为7.8 m,大于机身长度2 m,因此避免了碰撞的发生。 图7 编队中心与航点的距离偏差Fig.7 Distance between the formation center and the track point 情形2集群内无人机均能获得实时航迹信息,飞行空间有未知障碍 图8 集群躲避障碍的场景Fig.8 Scene of UAVs to avoid the obstacles 图8中黄色的球体即为障碍所在的位置,红色的曲线为预先规划的航迹,由于规划时不知道未来障碍的突发位置,所以在预先航迹规划时未对障碍1、2进行考虑,此时无人机对障碍的规避将主要依靠机载的传感器检测系统、障碍规避算法和其他控制以及执行机构。从图8显示的各机航迹看到,无人机在接近障碍物时发生明显背离障碍的侧向弯曲,即为机载传感系统检测到障碍和机体产生的规避行为,说明各架无人机能够依靠自身能力有效避开突发障碍的威胁;图9显示的是集群内部各个成员分别与障碍1和障碍2之间的距离随时间的变化曲线,图9中的2个最低谷为集群内成员分别与障碍1和障碍2最接近的时刻,由图9可见,集群内部的无人机仍与障碍物保持10 m以上的距离,有效地规避了障碍。采用情形1的数据分析方法同样可得各机间的最近距离为4.3 m,仍大于机身长度值2 m,能够避免集群内部成员之间的碰撞。 图10 集群穿越狭窄区域Fig.10 Cluster crosses the narrow area 情形3集群内部少数无人机可获得实时航迹信息,飞行空间无障碍 图11 基于邻域辨识的集群控制Fig.11 Cluster control based on neighborhood identification 从图11看到,集群内部有6架无人机,但只有1架能够接收航迹信息(标注为白色,占群体数的1/6),采用邻域跟随与辨识的方法为未接收到航迹信息的无人机选择跟随目标,无人机能在群聚作用和目标无人机的带领下从初始状态聚集和形成整体运动。同时,本文也按着文献[7]的方法对未接收到航迹信息的无人机采用群聚作用实施了控制,虽然也能产生聚集和整体运动(见图12),但与图11相比,飞行航迹过于曲折,对集群控制与安全不利。相比之下,显然采用邻域跟随与辨识的方法要好于仅采用邻域跟随的方法。 图12 群聚作用下的集群控制Fig.12 Cluster control under the clustering 本文受群体智能的启发,研究了无人机能正常接收和不能正常接收目标航迹信息以及空间有无障碍情况下的集群控制问题,应用此方法有以下结论: (1)本文将群聚规则与势场法结合和改进实现了无人机的聚集和朝向目标的整体性运动,无人机集群控制的灵活性、一致性和安全性都有了较大提升; (2)由于借助于虚拟无人机的运动模拟目标航迹,这种类似软控制的方法可通过修改航点灵活改变集群的飞行航线; (3)本文提出的对障碍物的应急避障方法考虑了计算机处理和设备的执行时间,符合实际情况。














2 稳定性分析








3 仿真实验验证











4 结 论
猜你喜欢
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
青年歌声(2019年12期)2019-12-17 06:32:32
物探化探计算技术(2018年4期)2018-08-22 07:08:26
自动化学报(2018年7期)2018-08-20 02:59:04
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
周口师范学院学报(2016年5期)2016-10-17 06:36:47
舰船科学技术(2015年8期)2015-02-27 15:38:47
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48