
有轨电车不平顺管理值研究
2018-09-22 01:38:40叶都玮徐世洲
机械设计与制造工程 2018年9期
叶都玮,徐世洲
(1.上海轨道交通设备发展有限公司,上海 200245) (2.同济大学铁道与城市轨道交通研究院,上海 201804)
确定符合安全舒适运营要求的有轨电车轨道不平顺管理值,是有轨电车轨道和基础结构设计的前提条件[1]。轨道不平顺管理值的制定有以下2个原则:一是保证乘员乘坐的舒适性,二是需要考虑运营方的维护能力以及运营成本[2]。目前,确定轨道不平顺管理值主要以轨道不平顺对机车车辆动力响应的影响为依据,根据车辆-轨道系统动力学仿真结果,再加上系统动力学响应随不平顺变化的规律来确定敏感波长和轨道不平顺波长管理范围。
轨道不平顺对机车车辆动力学响应的影响与机车车辆的结构及其固有频率有关。在轨道上行驶的机车车辆都有其固有频率,当轨道不平顺的激扰频率和机车车辆的固有频率接近时,更容易引起车体的振动,而轨道不平顺的激扰频率则是由轨道不平顺的波长和列车的运营速度决定的[3]。
由于有轨电车与城市机动车共路权,这就使得有轨电车的运营速度、轴重、编组以及轨道结构形式等无法直接套用铁路或其他轨道交通制式的轨道不平顺标准。目前,国内外尚缺少针对有轨电车轨道不平顺管理值的系统研究。本文以上海松江有轨电车为例,运用车辆-轨道耦合动力学理论,建立有轨电车多刚体模型,以轨道的高低、水平和方向不平顺为评价指标,对轨道不平顺的敏感波长及其幅值进行分析。
1 技术指标及模拟方法
1.1 技术指标
本文使用脱轨系数和轮重减载率来评价车辆的安全性。根据GB/T 5599—1985《铁道车辆动力学性能评定和试验鉴定规范》可知,脱轨系数的限值为1.0,轮重减载率的限值为0.6。
1.1.1轮轨动态作用指标
本文使用轮轨横向力来评价轮轨的动态作用。欧洲铁路试验中轮轨横向力的取值一般为车辆轴重的0.4倍。本文中轮轨横向力限值为80kN。
1.1.2平稳性指标
本文使用车体的振动加速度来评价车辆的平稳性。
结合日本新干线慢行管理目标值中对车体垂向、横向加速度值的规定,总结得到有轨电车加速度评价指标,见表1。
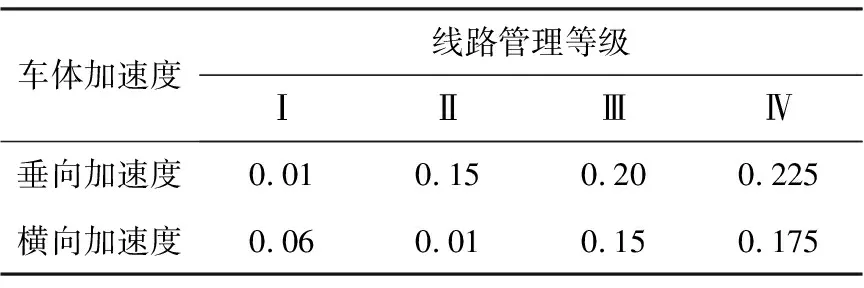
表1 振动加速度限值 g
1.2 模拟方法
本文在线路上加载高低、水平和方向不平顺。通常我国检测不平顺的方法是采用某一弦长范围内的几何偏差来评判,文中不平顺采用单一谐波形式[4]。
在仿真过程中,轨道不平顺均采用如下函数进行模拟:
Z=a[1-cos(ωt)]/2
式中:ω为轨道不平顺的频率;a为轨道不平顺的幅值;Z为轨道不平顺的数值;t为时间。
2 有轨电车动力学模型
有轨电车模型[5]由5节车辆模块编组而成,各车辆之间通过铰接结构进行连接,如图1所示。该模型主要包含车体、转向架、轮对和连接组件,同时采用了独立轮对和弹性车轮等相关技术,其铰接构架与电动机、传动装置、车轮刚性连接,并取消了一系悬挂。转向架与车体之间主要通过二系悬挂装置进行连接,二系悬挂主要包括螺旋钢弹簧、垂向和横向减振器。
图1中M1、M2为带司机室的动车模块,C1、C2为悬浮模块,NP为带受电弓的拖车模块。

图1 上海松江有轨电车模型
3 有轨电车轨道不平顺管理值
3.1 高低不平顺管理值
车体垂向加速度、轮轨垂向力、轮重减载率随轨道高低不平顺波长变化的曲线如图2~图4所示。由图2可知,当轨道高低不平顺波长从10m增加到20m,车体垂向加速度衰减了60.3%,但是随着不平顺波长的进一步变大,车体振动加速度的变化并不明显。由图3可知,轮轨力的变化受中长波(20~90m)不平顺的影响较小,主要在中短波(0~20m)范围内波动。图4所示的轮重减载率的变化主要受10~40m波长范围内的轨道高低不平顺的影响。波长从10m增加到40m,轮重减载率减少了69%,但随着高低不平顺波长的继续增加,轮重减载率变化较小。综上所述,车体垂向加速度、轮轨力和轮重减载率随轨道高低不平顺波长的增大而逐渐减小,但不同的波长变化范围对应的车体动力学响应变化的幅度不同,其中波长在10~20m时对车体动力学响应影响较大。查阅资料可以发现,该波长范围内列车在一定的运行速度下系统产生的激扰频率为1~2Hz,这与有轨电车车体的自振频率接近,故产生较大的动力学响应。因此,认为10~20m范围的波长为高低不平顺敏感波长。
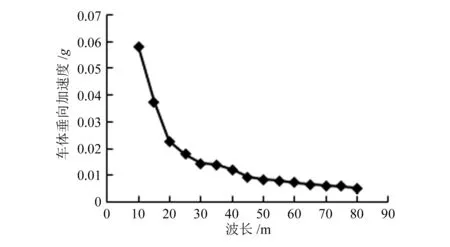
图2 车体垂向加速度与轨道不平顺波长的关系
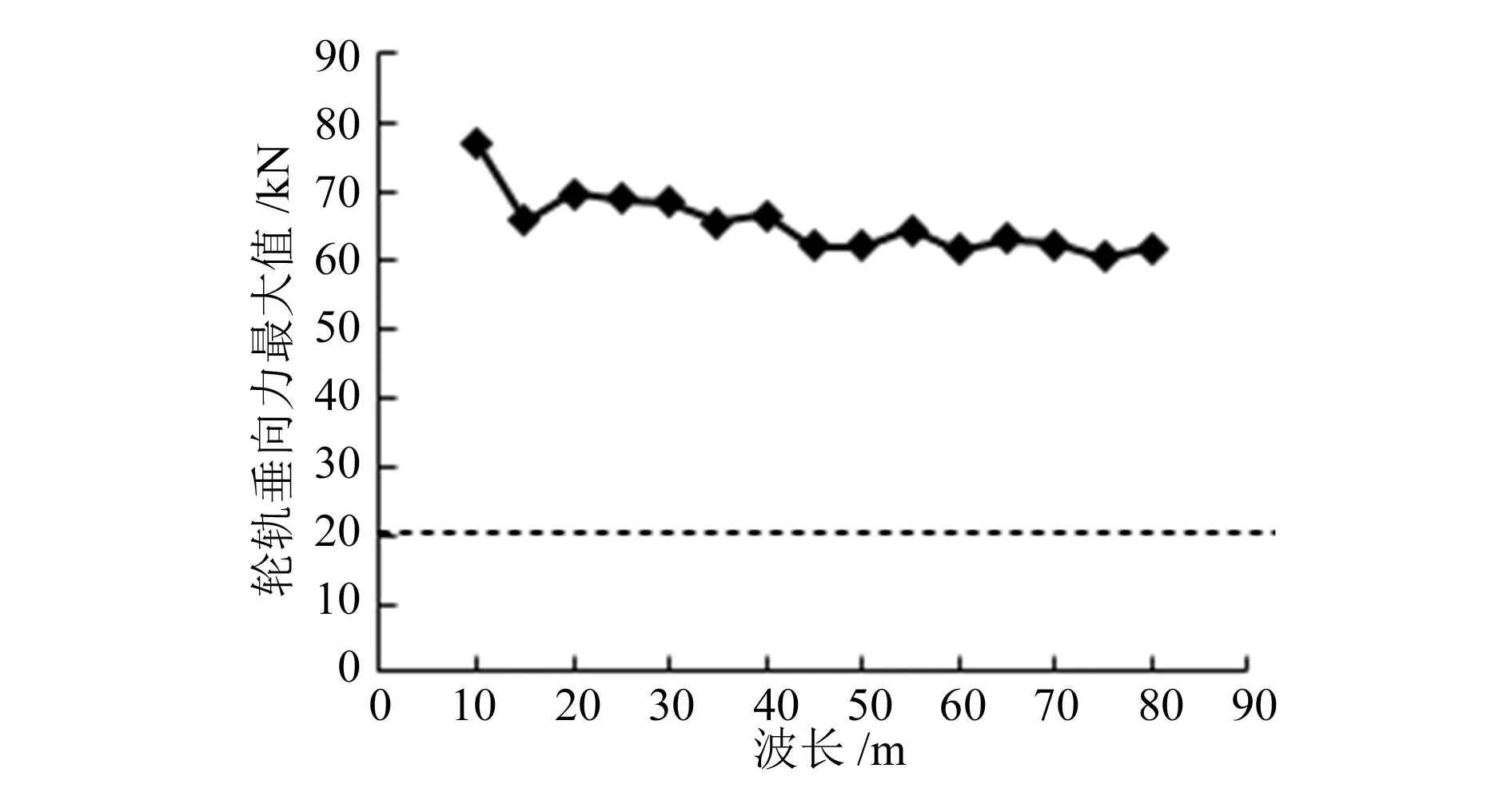
图3 轮轨垂向力与轨道不平顺波长的关系

图4 轮重减载率与轨道不平顺波长的关系
在敏感波长范围内选取最不利波长(即车体动力学响应最激烈)为10m时的高低不平顺值,分析不平顺幅值变化对车体垂向加速度、单轮脱轨系数和轮重减载率的影响规律。
轨道高低不平顺波长为10m、电车运行速度为70km/h时,高低不平顺幅值对车体垂向加速度、脱轨系数和轮重减载率的影响如图5所示。从图中可以看出,高低不平顺幅值变化对车体垂向加速度、轮重减载率的影响较为明显,但脱轨系数和轮重减载率均在安全限值内。综合考虑各类评价指标及相关文献标准,决定以车体垂向加速度来评价不平顺管理标准值。
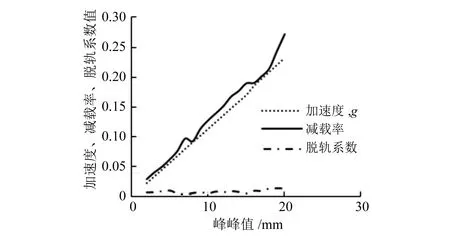
图5 轨道高低不平顺幅值的影响
根据图5可以得出,有轨电车在轨道高低不平顺波长为10m时高低不平顺的日常保养、舒适度、紧急补修、限速的动态建议值分别为16mm、26mm、34mm和38mm。
3.2 水平不平顺管理值
研究水平不平顺管理值应首先分析水平不平顺敏感波长。以车体水平加速度、车体垂向加速度、轮重减载率和脱轨系数为评价指标,分析车辆系统动力学响应随水平不平顺波长变化的规律。
车体水平加速度、垂向加速度、脱轨系数、轮重减载率与水平不平顺波长的关系如图6~图9所示。各动力学响应评价指标均随轨道水平不平顺波长的增大而减小。图6所示的车体水平加速度在轨道水平不平顺波长为10~20m范围内变化最为显著,20m波长对应的值较10m波长减小了73%。轮重减载率和脱轨系数等车辆动力学响应指标随水平不平顺波长的变化与车体水平加速度的变化相似,即轨道水平不平顺波长在10~20m区间变化对车辆系统动力学响应的影响最为显著。因此,认为10~20m范围的波长为水平不平顺敏感波长。

图6 车体水平加速度与轨道不平顺波长的关系
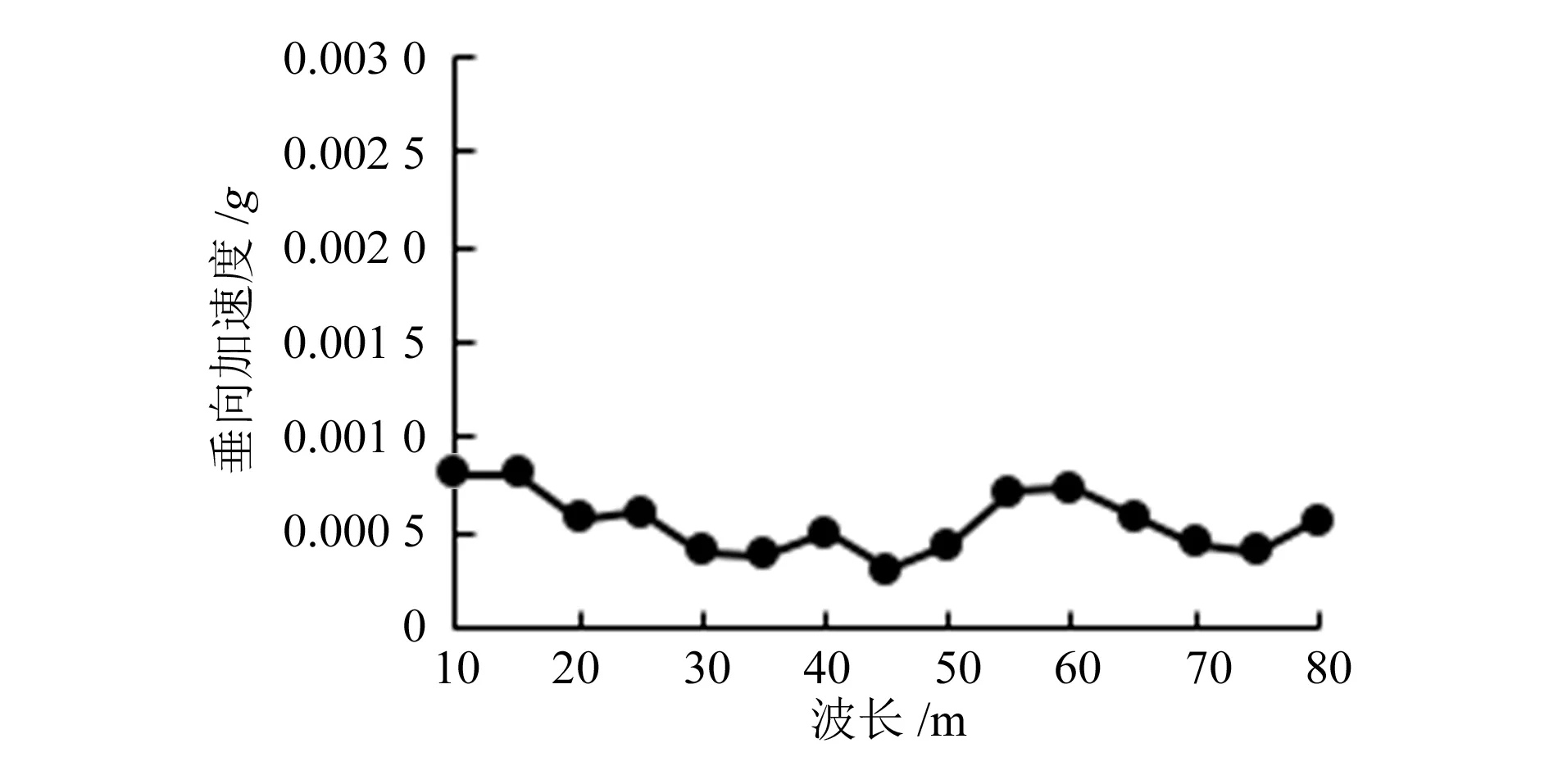
图7 车体垂向加速度与轨道不平顺波长的关系

图8 车辆脱轨系数与轨道不平顺波长的关系
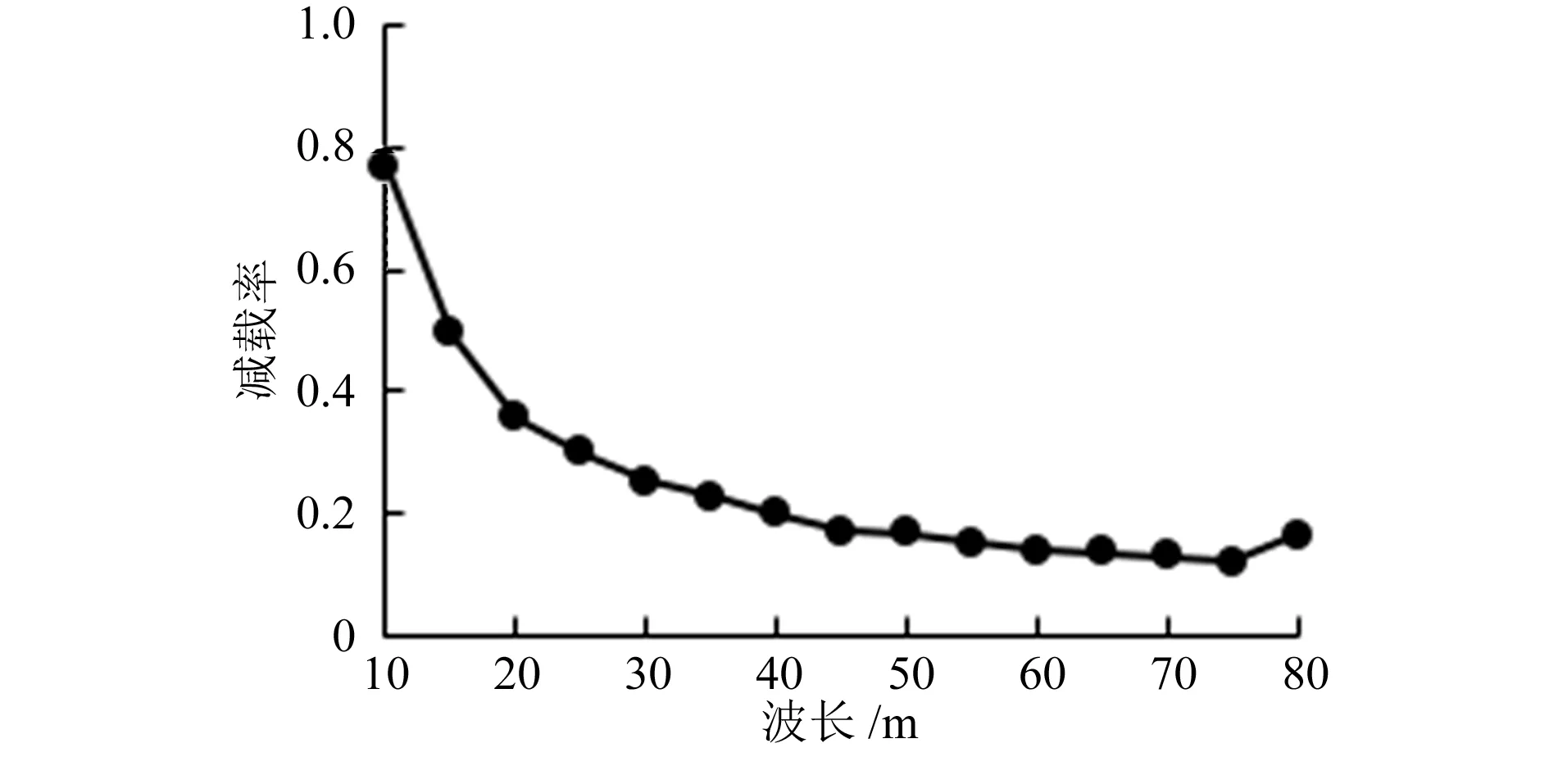
图9 轮重减载率与轨道不平顺波长的关系
在敏感波长范围选取最不利波长(即车体动力学响应最激烈)为10m,分析该波长下不平顺幅值变化对车体水平加速度、脱轨系数、轮重减载率的影响。
图10为最不利波长条件下,水平不平顺幅值与车体水平加速度、轮重减载率、脱轨系数等动力学响应指标之间的关系。从图中可以看出,水平不平顺幅值的变化对各动力学响应指标的影响较为显著。
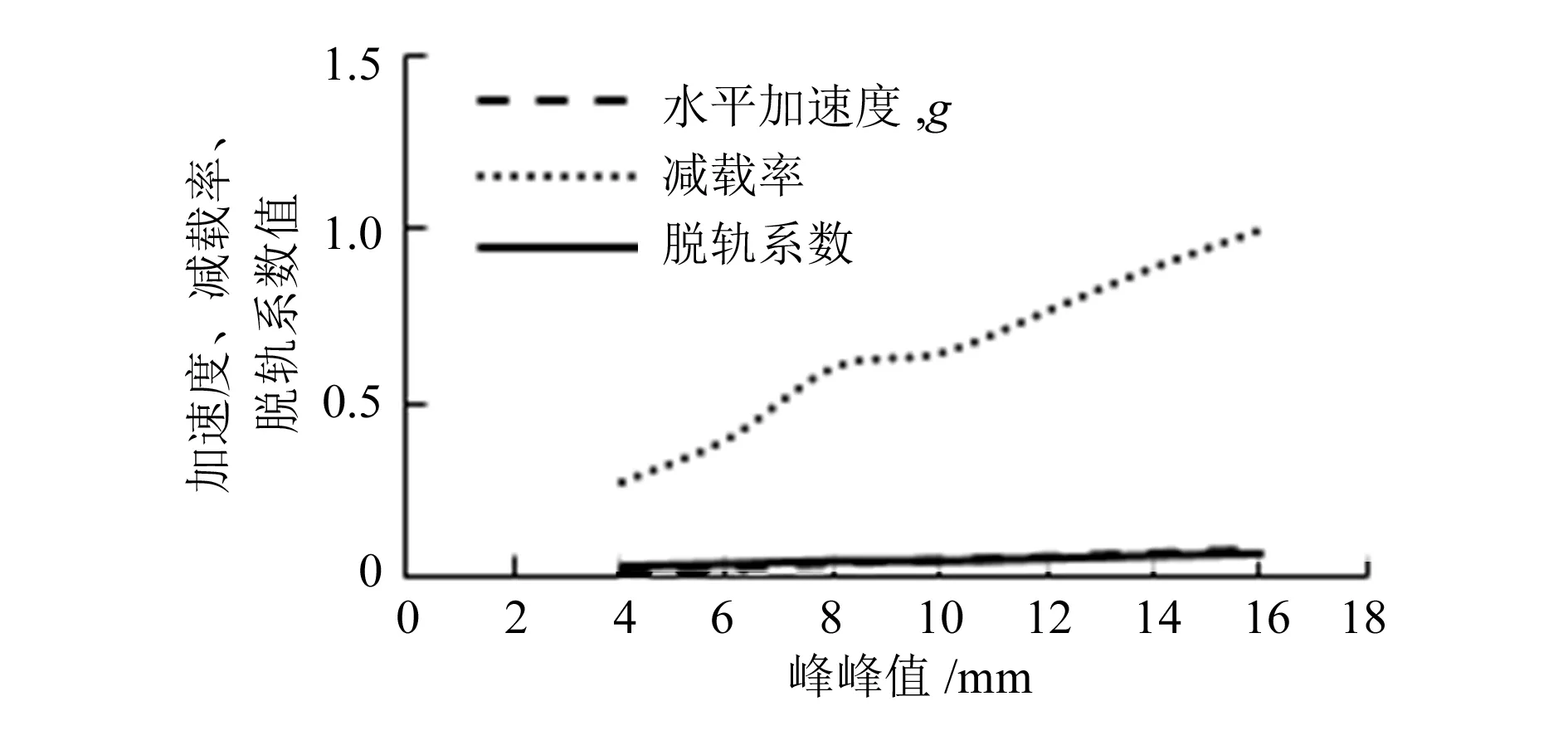
图10 轨道水平不平顺幅值的影响
根据图10可以得出,水平不平顺的日常保养、舒适度、紧急补修、限速等各种标准的动态建议值分别为8mm、10mm、12mm和14mm。
3.3 方向不平顺管理值
有轨电车轨道方向不平顺敏感波长的分析采用车体水平加速度、水平力和脱轨系数等作为评价指标。
车体水平加速度、水平力、脱轨系数和方向不平顺波长的关系如图11~图13所示。各动力学响应评价指标均随方向不平顺波长的增大而减小,且在波长10~20m范围内变化最为显著。因此,认为10~20m范围的波长为方向不平顺敏感波长。

图11 车体水平加速度与轨道不平顺波长的关系
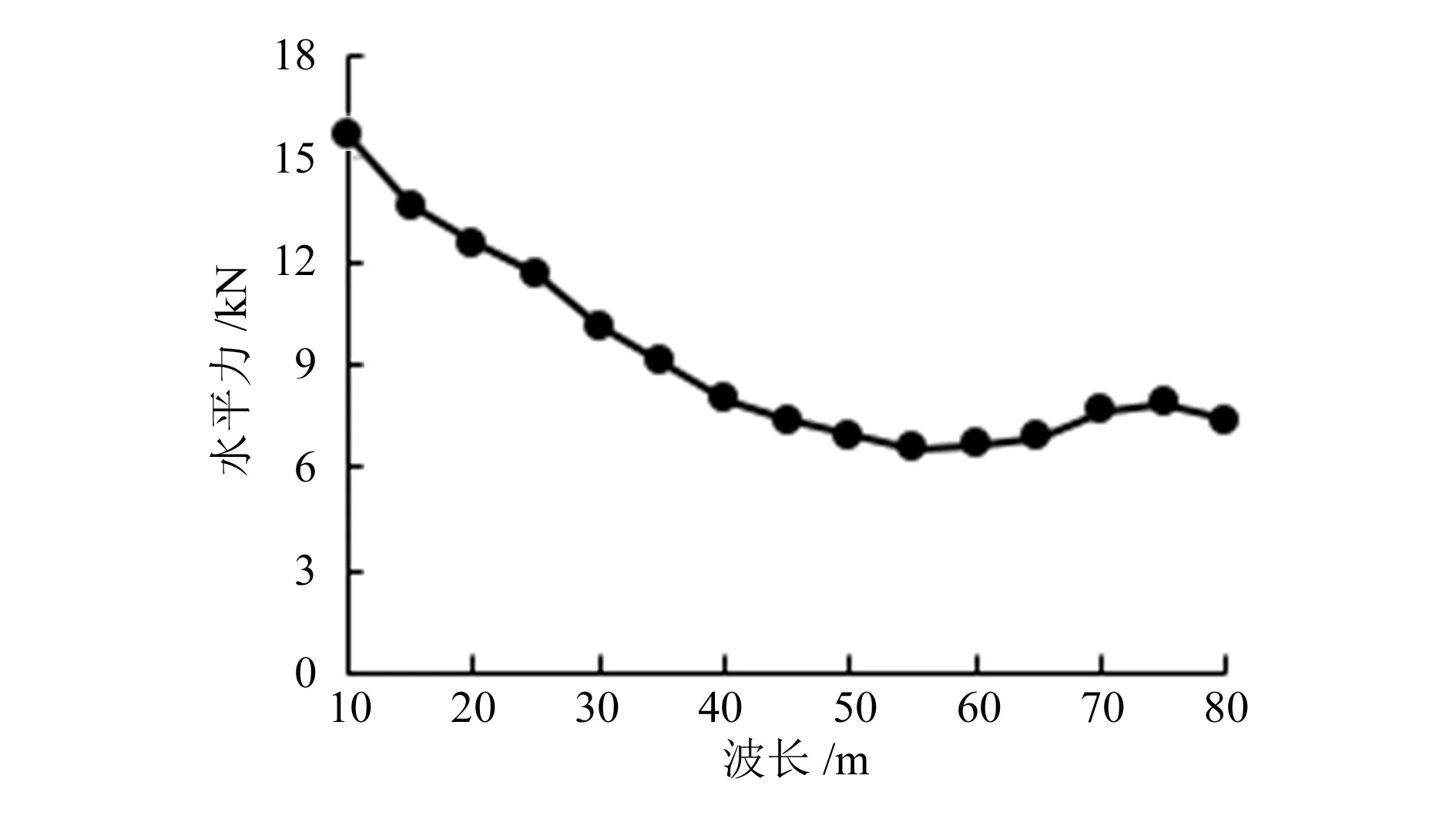
图12 轮轨水平力与轨道不平顺波长的关系

图13 车辆脱轨系数与轨道不平顺波长的关系
在敏感波长范围选取最不利波长(即车体动力学响应最激烈)为10m,分析该波长下不平顺幅值变化对车体水平加速度、水平力和脱轨系数的影响规律。
图14为最不利波长条件下,方向不平顺幅值与车体水平加速度、水平力、脱轨系数等动力学响应指标之间的关系。从图中可以看出,幅值的变化对各动力学响应指标的影响较为显著。
根据图14可以得出,方向不平顺的日常保养、舒适度、紧急补修、限速等各种标准的动态建议值分别为16mm、22mm、32mm和36mm。
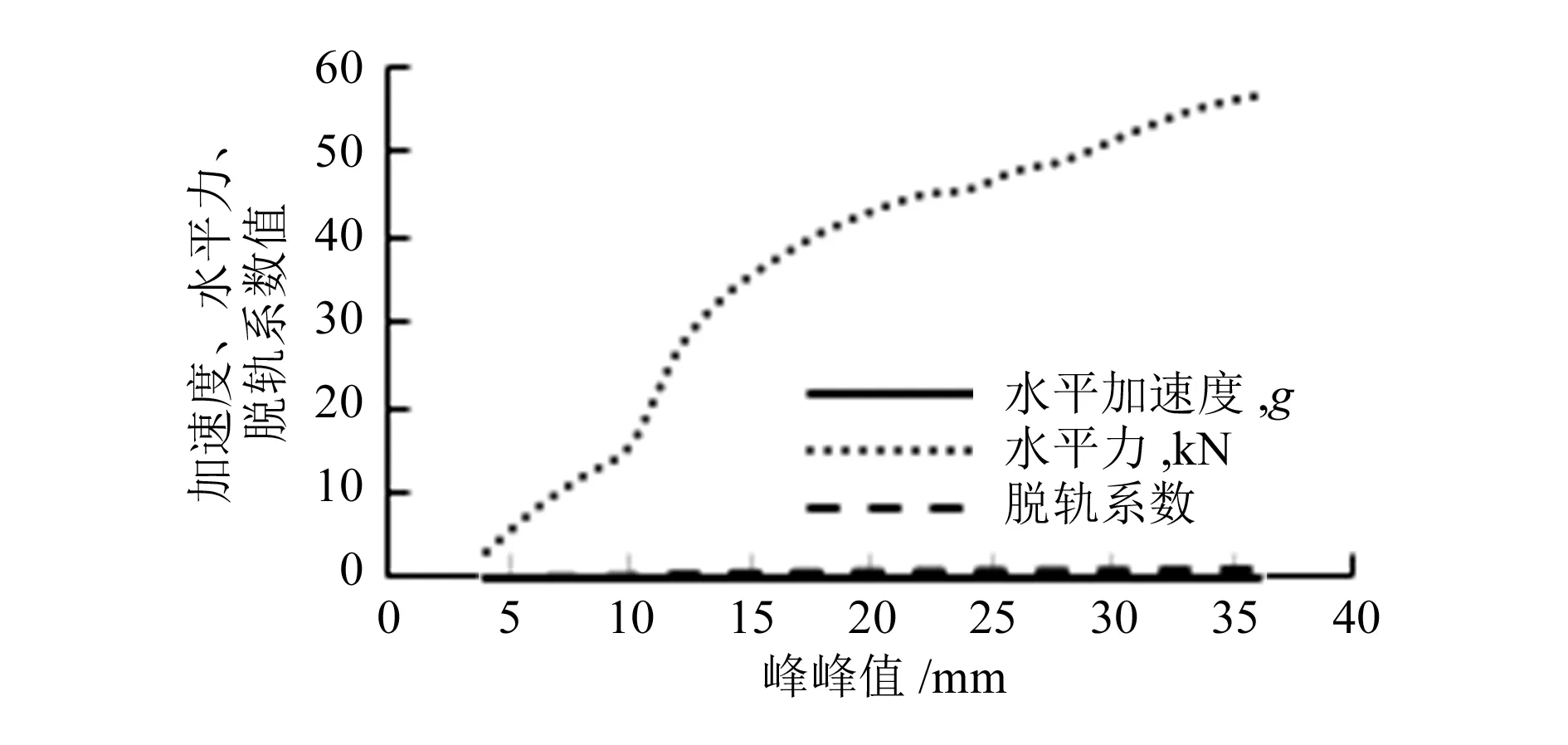
图14 轨道方向不平顺幅值的影响
4 结束语
本文通过建立车辆-轨道耦合动力学模型,计算由轨道不平顺引起的有轨电车系统动力学响应。研究结果表明,运营速度为70km/h的上海松江有轨电车轨道高低、水平和方向不平顺敏感波长范围均为10~20m。在敏感波长确定的基础上,给出了动态的有轨电车轨道不平顺建议值。在日常的维修养护工作中,应对敏感波长范围内的轨道不平顺值进行严密的监控,确保行车安全。
猜你喜欢
铁道机车车辆(2021年5期)2021-11-19 09:23:30
可再生能源(2021年9期)2021-09-25 02:44:36
艺术学研究(2021年2期)2021-07-30 23:01:58
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
无机盐工业(2019年5期)2019-05-24 07:59:28
品牌与标准化(2019年2期)2019-02-06 04:02:52
铁道机车车辆(2018年1期)2018-03-06 02:25:35
轨道交通装备与技术(2016年6期)2016-06-27 09:55:56
统计与决策(2012年12期)2012-09-26 09:11:00
