智能调节产品间距的系统的开发
2018-09-22 04:15:52高浩杰陆光铭东莞理工学院机械工程学院黎梓恒曾志彬吴国洪东莞市横沥模具科技产业发展有限公司
数码世界 2018年8期
高浩杰 陆光铭 东莞理工学院机械工程学院 黎梓恒 曾志彬 吴国洪 东莞市横沥模具科技产业发展有限公司
1 前言
包装作为生产的最后一道大工序,面临着多种加工的技术要求,包括把产品整齐地装箱,从而在企业中往往需要安排较多的员工在该环节。为了提高生产效率,有些产品会呈阵列形式放置从而被加工,但是,由于加工的技术要求,需要让这些产品相隔一定的距离,加工完成之后这些产品将要装箱,然而为了减小包装的空间,在装箱的过程中需要对相邻产品间的间距进行调整。现有的方法通常是采用人工的方式进行装箱,这严重影响了装箱的效率,同时也会增加企业的用工成本;也有些企业采用铰链机构实现调整产品间距可有效代替人工,但是相关铰链机构的复杂性让该设计与加工增加了难度,同时也增加了加工成本。若利用一种自动包装生产线来替代人工,预测不仅可以降低人力成本,而且可以提高作业效率,保证作业精准度。自动化包装生产线是将自动包装机、辅助设备以及输送装置根据产品包装工艺,按一定的排序组合,再配以相应的检测、控制、自动调整补偿装置等组成。包装物品由一端不断送入,包装材料在相应的工位加入,物品按工艺流程顺序经过各工序,产品从另一端输出,使物品在无需人工直接参与操作的情况下自动完成输送、包装的全过程。自动化包装生产线的辅助设备扮演着重要角色。
针对以上问题,本文提出了智能调节产品间距的系统的开发的方案,大致为利用无杆气缸带动机械手在水平方向移动,双杆气缸带动机械手在竖直方向移动,再利用四个行程分别相差10mm的双杆气缸的配合动作实现调节机械手的抓取间距。可调抓取间距机械手将作为自动化包装生产线的辅助设备,下文将具体从机构设计方面与软件系统搭建方面进行阐述。
2 硬件平台设计
本文所设计的机械手结构如图1所示,包括有连接组件、驱动件、传动件、执行件和限位件。机械手的连接组件包括有底板、立板、肋板、横梁、X轴载板、Z轴载板Ⅰ、Z轴载板Ⅱ、气嘴固定件。机械手的驱动件包括有无杆气缸、气缸Ⅰ、气缸Ⅱ、气缸Ⅲ、气缸Ⅳ、气缸Ⅴ。机械手的传动件包括有导轨、滑块、带滑块的光轴。机械手的执行件包括有气嘴Ⅰ、气嘴Ⅱ、气嘴Ⅲ、气嘴Ⅳ、气嘴Ⅴ。机械手的限位件包括有限位件、缓冲器。
如图1左右两端所示,底板、立板和肋板两两垂直设置,底板、立板和肋板组成的结构体左右对称设置,中间设置了横梁形成龙门式结构。无杆气缸设置在龙门式结构的上方,特指横梁的上方,利用无杆气缸驱动机械手的X轴移动,稳定性比较高。导轨和与之配套的滑块设置在横梁的前表面,并且导轨是水平设置,X轴载板设置在无杆气缸的杆体的前表面,并连接于导轨滑块的前表面,即为X轴载板在竖直面上同时连接了无杆气缸的杆体和导轨滑块。气缸Ⅰ设置在X轴载板的前表面,用于驱动机械手的上下移。Z轴载板Ⅰ设置在无杆气缸的杆体的上表面,Z轴载板Ⅰ呈凸字型。Z轴载板Ⅱ设置在气缸Ⅰ的杆体的下表面,Z轴载板Ⅰ与Z轴载板Ⅱ之间设置了左右对称的带滑块的光轴,当气缸Ⅰ动作时,Z轴载板Ⅱ和光轴一起相对于Z轴载板Ⅰ发生上下运动。气缸Ⅱ设置在Z轴载板Ⅱ的左半部分的右上角;气缸Ⅲ设置在Z轴载板Ⅱ的左半部分的左下角;气缸Ⅳ设置在Z轴载板Ⅱ的右半部分的左上角;气缸Ⅴ设置在Z轴载板Ⅱ的右半部分的右下角,气缸Ⅲ、气缸Ⅱ、气缸Ⅳ、气缸Ⅴ的形成依次减少10mm。气嘴固定件四个分别设置在Z轴载板Ⅱ的上方,分别与气缸Ⅱ、气缸Ⅲ、气缸Ⅳ、气缸Ⅴ的杆体连接,气嘴固定件的样式为长方体;气嘴Ⅰ、气嘴Ⅱ、气嘴Ⅲ、气嘴Ⅳ、气嘴Ⅴ从左到右分别设置在五个气嘴固定件的末端,即Z轴载板Ⅱ的正前方,特别说明,当气缸Ⅱ、气缸Ⅲ处于伸展的状态,同时气缸Ⅳ、气缸Ⅴ处于不伸展的状态时,五个气嘴固定件刚好依次接触;当气缸Ⅱ、气缸Ⅲ处于不伸展的状态,同时气缸Ⅳ、气缸Ⅴ处于伸展的状态时,五个气嘴固定件的间隔均增大10mm。限位件设置在五个气嘴固定件的上方,用于辅助导向五个气嘴固定件在水平方向移动;缓冲器有两个,分设置在两块立板的内表面,用于限定机械手在水平方向的运动范围。
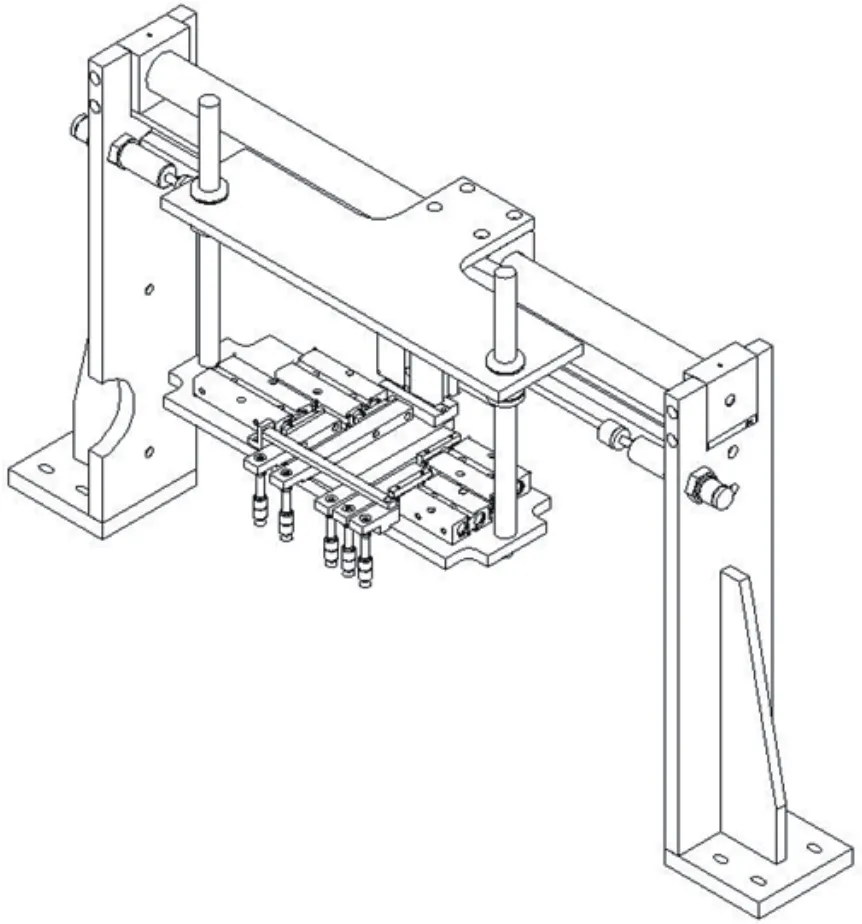
图1 硬件结构设计图
本文所设计的机械手的运动方式为,在水平方向设置的无杆气缸带动执行件(气嘴)在水平方向来回移动,其中左右的极限即为两个缓冲器的位置。在竖直方向上设置的气缸Ⅰ带动执行件(气嘴)在竖直方向来回移动;气缸Ⅱ、气缸Ⅲ、气缸Ⅳ与气缸Ⅴ之间的动作配合能调节五个气嘴之间的距离,即调节抓取的距离。当气缸Ⅱ、气缸Ⅲ处于不伸展的状态,同时气缸Ⅳ、气缸Ⅴ处于伸展的状态,此时五个气嘴的间距处于较大的状态;当气缸Ⅱ、气缸Ⅲ处于伸展的状态,同时气缸Ⅳ、气缸Ⅴ处于不伸展的状态,此时五个气嘴的间距处于较小的状态,如此通过改变气缸Ⅱ、气缸Ⅲ、气缸Ⅳ、气缸Ⅴ的通气方式即可调节机械手的抓取间距。
3 结语
本文所做的工作总结如下,根据功能的要求对机械手进行了结构设计,本文所设计的机械手利用一个无杆气缸实现在X轴上水平移动、利用一个双轴气缸实现在Z轴上竖直移动,利用四个行程形成等差数列的直线气缸,即可实现机械手在抓取产品的过程中自动调整产品间距的功能,控制方式简单,有利于工人快速上手操作。可调抓取间距机械手能作为自动化包装生产线的辅助设备,有助于提高作业效率,保证作业精准度,自动调整产品间距并完成装箱,具有良好的效益。
猜你喜欢
中国塑料(2023年10期)2023-10-25 10:58:46
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
西安建筑科技大学学报(自然科学版)(2022年2期)2022-06-14 01:27:04
爆炸与冲击(2019年1期)2019-01-03 06:54:54
上海大中型电机(2017年3期)2017-11-13 03:39:06
通信电源技术(2016年1期)2016-04-16 04:57:29
铁道科学与工程学报(2015年5期)2015-12-24 12:12:14
机电信息(2015年3期)2015-02-27 15:54:53
河南科技(2015年2期)2015-02-27 14:20:23
兵工学报(2014年10期)2014-06-27 05:41:50