
基于DEM的SPOT5遥感数据配准与镶嵌
2018-09-17 02:33:24白潍铭
资源环境与工程 2018年3期
白潍铭, 赵 帅, 姚 畅
(河南省航空物探遥感中心,河南 郑州 450053)
遥感技术兴起于上世纪60年代,是根据电磁波理论发展起来的对地观测技术,通过自身传感器对地球表面的地物辐射和地物的反射电磁波信息,经过传输、加工、处理等最终成像,是一种远距离探测与识别目标的综合技术[1]。随着遥感技术日新月异的发展,研制出了越来越多的传感器并应用于科研生产当中,例如美国的LANDSAT系列卫星、日本的ALOS卫星、法国的SPOT系列卫星以及中国的资源卫星、高分系列卫星等,种类繁多且各具特色的遥感卫星不胜枚举。
SPOT系列卫星是法国空间研究中心研制的地球观测卫星系统,包括SPOT1、2、3、4、5、6卫星。SPOT5卫星于2002年5月初发射升空,其传感器比其之前其他卫星有较大地提高,HRG传感器替代了HRVIR,具有更高的分辨率,拥有2.5 m的全色波段和10 m的多光谱波段;采用120 000像元的CCD探测器,影像宽幅60 km;采用新的数据压缩方法并利用150 Mbit/s的速率传输下行数据,因而可获取更多、更清晰的遥感影像数据。优越的传感器性能获取的影像质量越来越受到科研工作者和生产单位的青睐,SPOT5遥感数据应用范围广泛,涵盖国土、环境、林业、农业、水利、地质、海洋、测绘等各个领域[2]。
遥感数据的预处理是遥感应用的基础,而配准与镶嵌是遥感数据预处理的主要内容之一,对保障遥感数据应用成果的质量起着重要的作用。相邻的两幅SPOT5遥感影像做镶嵌拼接后,重叠区域的相同地物类型错位误差较大,无法像LANDSAT数据直接基于自带地理坐标的镶嵌即可满足影像拼接,这是由于两幅SPOT5影像的重叠区域较少,且在卫星成像处理中每一个影像像元的空间位置相对于地表或地形图的实际位置发生的物理变化,主要有挤压、扭曲、偏离、伸展等空间形态的变形等因素,这些因素使像元的形状、大小、方向、位置等发生了改变。即使邻近的两幅影像在重叠区域上由于不同的影响因素造成的几何畸变也会不同。实践发现尤其是在南半球地形起伏较大地区,同时受地球自转的影响,SPOT5数据的几何畸变程度更大,故而需要一幅基础影像根据重叠区域对另一幅影像进行配准(几何校正)才能减少或消除影像畸变,使影像重叠部分的地物类型相吻合[3-4]。分析卫星影像的几何畸变成因的几个方面主要有如下七点:①传感器系统参数误差;②卫星运行姿态的变化导致影像像元几何拉伸、挤压、平移、扭转;③大气散射、反射、折射的扰动,改变了电磁波的传播方向、路径及时间;④成像时的透视误差;⑤地形起伏变化引起像元位移和比例改变;⑥地球自转的成像误差;⑦地球曲率差异影响。
这里简要说明笔者对配准与几何校正的理解。几何校正为绝对校正,指图像对基准图像或图像对地形图的校正时,基于地理坐标的校正,使得校正后的图像仍具有地理信息,前提是基准图像带有精校正后的地理坐标。配准属于相对校正,过程和几何校正一致,是指一幅影像相对另一幅影像的校正,基准图像不一定带有地理信息,只是两幅影像之间的位置相对一致,与真实位置不一定一致,这里的基准影像即使有地理信息,但由于几何畸变的影响,与实际位置也不完全一致,仅是表达两幅影像之间的校正过程,不强调校正后的地理坐标是否与实际位置相同,因此本文使用配准一词更贴切。
影像数据的镶嵌是指可以叠加两幅或两幅以上影像的重叠区域,进而达到拼接成一幅完整影像的目的[4]。影像镶嵌通常是由于一幅影像不能涵盖研究区范围,因此对两幅及以上影像需要镶嵌才能达到合二(多)为一,满足研究区范围的需要。因此,通过影像配准为下一步的镶嵌提供基础,通过影像镶嵌为研究区提供完整的地理底图。本文以两幅南半球的博茨瓦纳地区SPOT5遥感影像为例,利用DEM数据做正射校正及配准,最后对影像进行镶嵌拼接,探讨分析基于影像数据正射校正后对两幅影像镶嵌的效果。
1 材料与方法
1.1 数据源
本文采用法国SPOT5遥感影像为数据源。SPOT5卫星于2002年5月4日发射,是继SPOT1、2、3、4卫星之后的第五颗,为近极地太阳同步轨道,轨道高度832 km,轨道倾角98.7°。该卫星搭载4台传感器,分别是2台高分辨率几何成像仪(HRG)、1台高分辨率立体成像仪(HRS)、1台植被探测仪(VGT),其中全色波段分辨率最高为2.5 m,多光谱分辨率最高为10 m。HRG传感器波段参数如表1所示。

表1 SPOT5 HRG传感器各波段参数表Table 1 Parameters of each band SPOT5 HRG sensor
数字高程模型(Digital Elevation Model,简称DEM),又称数字地形模型,它是由一组有序数值阵列表示而成,是数字地面模型(Digital Terrain Model,简称DTM)的一部分,X、Y表示坐标,Z表示高程、坡度、坡向等,当Z仅表示高程时就是DEM[5-9]。
本文采用SRTM DEM作为正射校正的数据源,分辨率为30 m,绝对高程精度7 m。由于DEM能够体现地面的高程信息,因此在测绘、国土、地质、海洋、军事、交通、城市规划等国民经济和国防建设中有着重要的应用,如在地质灾害中,可用于崩塌、滑坡、泥石流的体积计算以及地面沉降的监测;在城镇建设中,可模拟三维城市景观,为城市规划布局提供服务;在水文分析方面,可进行地表水径流量预测、洪灾估算、淹没分析等[10-12]。
1.2 DEM理论基础
DEM是地形表面的高程表达式,可以由一个或多个数学函数来表示地面的高程,表示高程的过程称为地形表面建模,模型表面即为DEM表面[13]。
DEM建模的主要表示方法有基于点的表面建模、等高线建模、规则格网模型(Grid)、不规则三角网模型(Triangulated Irregular Network,简称TIN)。基于正方形格网和不规则三角网的DEM建模,是两种常用的、基本的建模方法。本文阐述不规则三角网的建模方法来体现DEM的建立过程,进而探讨DEM正射校正的优势。TIN是通过从不规则分布的数据点生成的连续三角面来模拟地形表面,与格网数据模型相比,TIN模型在某一特定分辨率下能用更少的空间和时间、更精确地表示更加复杂的表面。特别当地形包含有大量特征如断裂线、构造线时,TIN模型能更好地顾及这些特征,从而能够更精确合理地表达地表形态。
构建TIN模型,要符合以下三个条件:
(1) 三角形网络有且仅有一个;
(2) 力求最佳的三角形几何形状,尽量使每个三角形都趋于等边三角形;
(3) 三角形的周长最小,即构成三角形的顶点是离散点中距离最近的。
满足以上条件的三角网就是著名的狄洛尼(Delaunay)三角网。Delaunay三角网由对应Voronoi多边形共边的点连接而成(与Voronoi图对偶,由虚线表示,如图1所示)。由三个离散且相邻最近的点互相连接形成Delaunay三角形,这三个相邻点对应的Voronoi多边形有一个公共的顶点,此顶点同时也是Delaunay三角形外接圆的圆心。图1中的Delaunay三角网遵守平面图形的欧拉定理:
Nregions+Nvertices-Nedges=2
(1)
研究表明,Delaunay三角网在地形拟合方面表现最为出色,因此常常被用于生成TIN。根据DEM产生的地形晕渲图与正射影像的比较也可以看出,基于TIN的图像与正射影像吻合得更好[14-15]。

图1 Delaunay三角网模型Fig.1 Delaunay triangulation model
1.3 DEM的正射校正
基于DEM的正射校正有两种方式:其一,利用含有星历参数或RPC文件的影像数据直接通过DEM进行影像的正射校正,在Map/Orthorectification/SPOT/Orthorectify SPOT下完成;其二,利用地面控制点增加校正精度的方式,在Map/Orthorectification/SPOT/Orthorectify SPOT with Ground Control下完成。首先,打开地面控制点对话框,选择地面控制点的位置,在三视窗口中使用大十字线放置于SPOT5所选同名控制点上,打开Pixel Locator,选择Export,在Elev文本框中自动添加DEM中的高程信息;然后点击Add Point把点位添加到控制点列表,以同样的方式继续选择控制点至少达到3个或3个以上,点击ShowList按钮查看所选控制点,确定误差RMS是否满足要求;最后输出结果,在地面控制点对话框中打开Options/Orthorecity File,选择采样方法、DEM数据、投影参数、像元大小,完成正射校正过程。本文选择第二种方式进行SPOT5数据的正射校正。
2 实验与分析
2.1 研究区概况
博茨瓦纳位于非洲南部内陆,东接津巴布韦,西连纳米比亚,北邻赞比亚,南接南非。该国地处南非高原中部的卡拉哈迪盆地,西北部为奥卡万戈三角洲沼泽地,东南部和弗朗西斯敦周围是丘陵地带,中部和西南部为喀拉哈里沙漠(约占全国面积的2/3),北部的卡萨尼是大量野生动物的栖息地。境内无大的河流,南回归线穿过博茨瓦纳境内,地势大致平坦,但有起伏的高原,平均海拔约1 000 m左右。大部分地区属热带干旱草原气候,西部为沙漠,属热带沙漠气候,年均气温21 ℃,分为春(9-11月)、夏(12-2月)、秋(3-5月)、冬(6-8月)四季,年均降水量400 mm。博茨瓦纳矿产资源丰富,主要矿藏为钻石,其次为铜、镍、煤、苏打灰、铂、金、锰等,钻石储量和产量均居世界前列。
2.2 配准与镶嵌
在做配准与镶嵌之前,首先在ENVI5.3软件中基于Pushbroom模型对两幅SPOT5影像做正射校正,正射校正影像如图2所示。正射校正后影像(图2-b)比正射校正前影像(图2-a)有了明显的正旋转,说明正射校正对影像的配准(或几何校正)具有良好的辅助作用。

图2 正射校正Fig.2 Orthophoto correction左图为原始影像拼接,右图为正射校正后影像拼接。
影像配准或几何校正应遵循以下原则:①选择基准影像(或地形图)与配准影像上均有的相同地标;②通常控制点选在图像的四角和对角线交点处,然后逐渐加密,使控制点均匀分布全图;③尽可能选在固定的地物交叉点上,如果无精确定位的标志,可利用半固定的地形地物交叉点(山顶、河流交汇处等);④选点数应至少为(n+1)(n+2)/2,其中n为选择多项式的次数,一般控制点数应远大于最低数。
两幅或多幅影像的镶嵌可以使用两种方法:一种是基于像元的镶嵌;一种是基于地理坐标的镶嵌。本次研究数据自带有地理信息,故采用基于地理信息的镶嵌方法,在该方法基础上,对比研究以下三种镶嵌方式:①直接镶嵌法;②基于配准后的镶嵌;③基于正射校正和配准后的镶嵌(图3)。

图3 配准与镶嵌Fig.3 Registration and mosaic注:以上显示局部道路均为融合后2.5 m分辨率。
2.3 精度评价
经过三种方式的镶嵌,误差结果如表2所示。
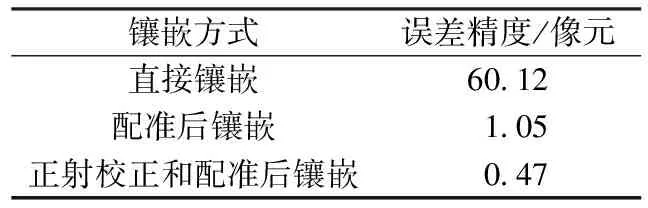
表2 镶嵌误差对比表Table 2 Mosaic error comparison table
从表2可知,直接镶嵌的误差最大,平均误差精度为60.12个像元,经配准后镶嵌的误差明显缩小,平均误差精度为1.05个像元,而经过DEM正射校正和配准后的镶嵌,其误差精度最小为0.47个像元。
从三种形式的图像镶嵌效果来看,由于两幅影像本身的几何畸变,直接镶嵌的结果造成道路等地物实体拼接具有明显的错位现象,不符合拼接精度要求;基于配准后的图像镶嵌精度明显提高,与图3-c相比依然有错位现象,但比直接镶嵌的结果有很大地改进,而基于正射校正和配准后的影像,拼接效果最好,道路等地物实体基本上拼接完好,拼接误差在0.5个像元以内,能够为后续的影像融合、制作三维影像图等提供保障。
3 结束语
本文以南半球的博茨瓦纳地区相邻的两景SPOT5遥感影像为数据源,利用DEM对影像做正射校正,基于正射校正后的影像对重叠区域进行配准、镶嵌,达到与重叠区域内相同地物类型的位置相吻合[5],进而生成满足精度要求的遥感影像图。
南半球的SPOT5影像由于受研究区内地形起伏和地球自转影响,造成卫星影像的几何畸变较大且相邻影像的重叠部分较少,使影像的配准、镶嵌无法满足精度要求,因此通过正射校正后再配准、镶嵌能够很好地满足精度要求,由此可看出,在同类地区对遥感影像做正射校正的必要性和重要意义。然而经过细致的配准后,仍难免有误差,下一步可以使用更高精度的DEM对影像进行配准与镶嵌的研究。
猜你喜欢
国学(2020年1期)2020-06-29 15:15:30
数学物理学报(2017年6期)2018-01-22 02:26:53
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
智能计算机与应用(2017年2期)2017-05-04 00:45:34
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
全球定位系统(2015年4期)2015-02-28 12:38:12
长江工程职业技术学院学报(2014年4期)2014-11-30 02:41:40
电子设计工程(2014年18期)2014-02-27 12:00:26
