
基于FPGA+CPU的信号处理系统的设计与实现
2018-09-14 11:31上海广电通信技术有限公司李红霞
电子世界 2018年17期
上海广电通信技术有限公司 李红霞
0 引言
船舶驾驶员在驾驶船舶过程中,需要做到瞭望、定位、导航和避碰,这就要通过船用导航雷达来保证。船用导航雷达是船舶正常航行所必备的电子设备之一,在过弯道、船舶靠港和离开以及海上作业等方面起到了重要的作用[1]。
雷达系统的不断升级相应的要求大幅提升信号处理系统的计算速度、数据带宽和传输速率[2]。而现有的雷达信号处理系统的运算能力较低,传送数据的速率不高,无法满足现代信号处理的需求。因此增强雷达系统的运算能力,提高传送数据的速度是如今雷达信号处理亟待解决的问题。本文所采用的方案,可以很好地完成实时、可靠的雷达信号处理。
本文中的信号处理系统采用ADC+FPGA+CPU的系统架构,集高密度计算与高速数据传输于一体,实现强大的信号处理及数据交换能力[1],同时提高了系统的集成度。
1 系统设计
船用导航雷达信号处理的数据量大,对实时性和数据传输速率都要求较高,本文中针对以上特点,并结合 FPGA的流水性能以及通用CPU的并行处理能力,将算法合理分配至不同的处理器中,提升了信号处理能力和数据传输能力,降低成本的同时提高了系统的集成度。
船用导航雷达信号处理系统通过ADC对视频信号进行采样,将模拟视频信号转换为数字化的视频数据。FPGA接收雷达接口卡的触发、船艏、方位等信号,计算得到当前的方位码信息,并且对数字化的视频数据进行同频异步干扰抑制、脉间积累等处理。FPGA将此视频通过PCIE总线发送至CPU进行杂波抑制、增益控制等处理。CPU将处理后的视频数据一方面通过PCI总线发送给雷达主机板进行雷达画面的显示;一方面进行点迹凝聚、目标跟踪等算法处理,之后通过串口将目标航迹信息发送至雷达主机板进行雷达二次信息的显示。
2 硬件设计
图1所示是船用导航雷达信号处理系统的ADC+FPGA+CPU系统设计方案。其中模数转换器采用AD9628芯片,采样频率最高可达105MHz,量化位数为12位。首先利用高速差分运放ADA4932-2把单端信号转换成差分信号,再通过直流耦合方式送给AD9628进行AD采集。时钟信号由AD9512提供,FPGA通过SPI接口对AD9628、AD9512进行配置。利用12对LVDS把AD9628与FPGA相连。
FPGA采用XILINX VIRTEX5系列的XC5VLX95T,其外围挂载2组DDR2 SDRAM,每组位宽32位,容量为256MB,用于视频数据的存储。FPGA的软件开发基于Xilinx ISE13.1集成开发环境,采用VHDL语言。
CPU采用通用的COMe模块,其CPU为i5-4400E,主频2.7GHz,双核四线程,外围搭载16GB的DDR3。CPU与FPGA之间通过PCIE总线进行高速数据传输,线速率最高可达2.5Gbps。CPU与雷达主机板之间通过33MHz、32位的PCI总线传送视频数据,并通过串口进行目标航迹数据及雷达导航数据的传输,波特率最高可达115200bps。另外,它还提供10/100/1000Mbps自适应的RJ45的网口、4路USB接口、1路VGA接口。
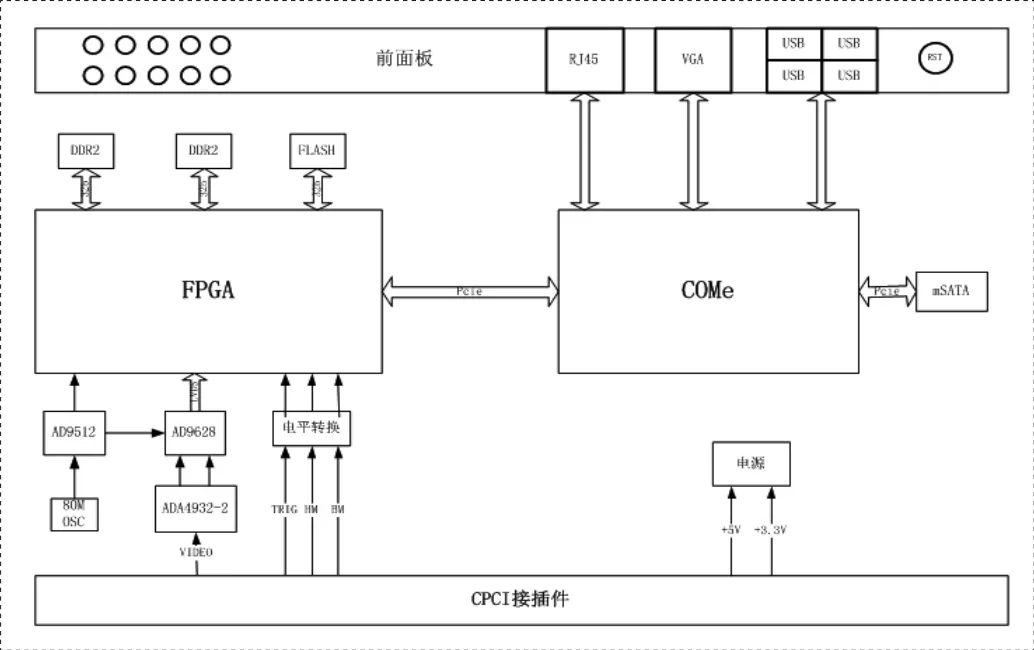
图1 船用导航雷达信号处理系统的硬件结构
3 软件设计
软件设计包括信号预处理、信号处理、目标跟踪三部分。
3.1 信号预处理软件
信号预处理软件基于FPGA的平台实现,其功能主要包括:信号采集、方位码计算、噪声抑制等。
(1)信号采集
模拟视频信号通过ADC转化成数字视频信号,FPGA控制其采样时序,并依据重频状态,将相应的数字视频数据存储至内部FIFO中,当读信号有效时,读出FIFO内的数据,供其他模块使用。
(2)方位码计算
方位码计算模块接收触发、船艏、方位信号和本舰船艏向信息和船艏校正信息,生成一个高精度的16位基于船艏方位码和基于正北方位码。此高精度方位信号,满足跟踪和显示精度的需求。
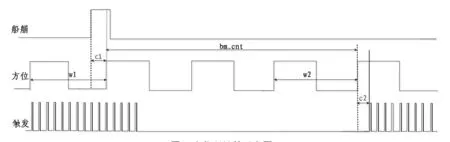
图2 方位码计算示意图
如图2所示,当前触发上升沿到来时刻基于船艏的方位码为:

(3)噪声抑制
由于噪声在空间上均匀分布,且往往幅值较小,可通过相邻多个脉冲间相同距离上的视频幅度取均值,用以抑制噪声。但是如果每个脉冲都重新计算N条脉冲的均值,计算量和数据存储量都是很大的考验。为了提高运算效率,节省存储量,设计时采用滑窗的方法来实现脉间积累的累加操作。
3.2 信号处理软件
信号处理软件基于CPU的硬件平台,在linux系统上进行开发,其实现的功能主要包括:杂波抑制(海浪抑制、雨雪抑制)、增益控制、点迹凝聚等,并发送数据给目标跟踪模块和雷达主机板。
(1)杂波抑制
由于杂波和干扰剩余是时变的,并且非均匀的分布在空间中,不同区间的杂波强度具有较大差别,所以船用导航雷达信号处理系统采用单元平均恒虚警算法进行杂波抑制。
(2)增益控制
增益控制模块接收雷达主机板的增益控制命令,对杂波抑制后的杂波剩余数据进行增益控制,滤除噪声,得到除去杂波和噪声的视频数据。
(3)点迹凝聚
点迹凝聚模块接收每个脉冲的报文数据,经过脉冲内凝聚和脉冲间凝聚,从雷达回波视频数据中,将真实目标的回波以点迹的形式提取出来,将点迹数据以扇区为单位输出给目标跟踪模块。
3.3 目标跟踪软件
目标跟踪软件对凝聚后的点迹数据进行数据关联,将同一目标在不同扫掠间的点迹关联在一起,然后对目标的运动信息进行滤波平滑,形成一条可以形容目标运动态势的航迹,并通过串口发送给雷达主机板进行显示,为操作人员提供参考信息,指导航行、规避危险目标,保障航行安全。其中,数据关联采用的算法是最近邻关联法,航迹滤波采用α-β匀速滤波器。
4 结束语
今后,船舶导航雷达的趋势将是由雷达天线和雷达信号处理板以及普通PC机及显示器组成一部性能优异的雷达[3]。其中雷达信号处理板将是影响雷达性能的关键部分,因此雷达信号处理板的性能优劣将直接影响雷达的整体性能。本文的导航雷达信号处理系统可以完成实时处理较大数据量的信号,并进行非常快的数据传送工作,针对现代雷达信号的特点设计的算法抗干扰能力强、灵敏度高、运算效率高,可靠性好,满足船用导航雷达的需求,实际应用效果良好。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
山东冶金(2022年1期)2022-04-19
科学与信息化(2021年30期)2021-12-24
柴油机设计与制造(2018年3期)2018-10-13
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
兰台世界(2017年9期)2017-06-01
西北工业大学学报(2015年3期)2015-12-14
