
预警卫星与地基雷达协同引导计算及效能分析
2018-09-13 05:04郭继光
中国电子科学研究院学报 2018年4期
潘 越,郭继光
(中国电子科学研究院,北京 100041)
0 引 言
弹道导弹具有射程远、速度快、高度高、突防措施多[1]等特点,地基预警雷达探测精度高但受到部署位置和地球曲率影响,探测范围有限,预警卫星探测范围广但只能探测到助推段飞行目标,单个预警探测装备发现目标能力有限,必须将预警卫星和远程预警雷达进行综合集成,通过预警卫星及时准确引导预警雷达,提高对来袭弹道导弹目标航迹跟踪能力和精度,增强预警系统提供信息的准确性和有效性,确保体系预警效能最优。
本文对预警卫星与远程预警雷达协同探测需求进行分析、对预警雷达在引导信息支持下引导计算以及预警卫星引导预警雷达效能分析开展研究,并通过仿真试验计算了特定场景下引导交接指令,评估了装备引导效能。
1 协同引导需求分析
预警卫星系统用于监视、发现和跟踪敌方弹道导弹发射。在导弹助推段,发动机尾部喷出的炽热火焰红外辐射非常强,预警卫星探测弹道导弹的关键是探测导弹尾焰的红外辐射,该阶段是导弹红外辐射最强的阶段,但该阶段持续时间短,对于典型的洲际弹道导弹来说,该阶段一般仅持续1~2 min。
远程预警雷达多采用相控阵技术体制,合成功率很大,能够得到很大的作用距离,可以实现多目标、高数据率、高灵敏度、多功能探测和跟踪,作用距离远,抗干扰能力强。
预警雷达同时须完成搜索、跟踪任务,雷达资源是有限的,分配过多搜索资源将导致性能下降[2]。导弹预警卫星除提供早期预警信息外,还可以提供目标种类识别信息。利用目标引导信息,调整远程预警相控阵雷达拦截屏厚度、仰角以及数量,提高目标截获概率。预警卫星提供的射向信息存在误差,使得误差管道逐渐增大,远程预警雷达搜索窗口也在不断增大。预警卫星引导远程预警雷达的示意图如图1所示。

图1 预警卫星引导预警雷达示意图
2 协同引导计算
2.1 自主搜索分析
远程预警雷达对于不同作战对象以及不同作战场景,采用不同的搜索模式,主要包括全空域搜索模式、大空域搜索模式、搜索警戒线模式、搜索屏模式和搜索窗模式。
远程预警雷达一般具有极大的功率孔径积,威力覆盖范围大,其多采用搜索警戒线或搜索屏的监视方式。远程预警相控阵雷达没有来袭目标的引导信息时,在全方位角范围内采用搜索警戒线模式搜索,以免漏掉目标。弹道目标发射升空后,穿越雷达事先设置的由若干水平波位组成的搜索警戒线,,如图2所示。
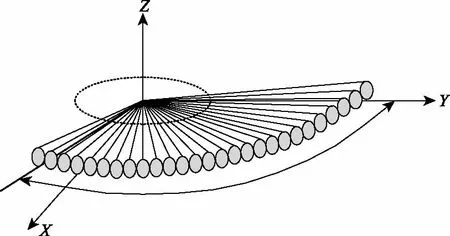
图2 预警雷达无引导搜索示意图
2.2 引导搜索分析
在没有外部预警信息引导的情况下,远程预警雷达搜索目标耗费大量的雷达资源。利用导弹预警卫星预警信息引导远程预警雷达,减小雷达截获屏的大小,将明显提升雷达的资源利用率。
引导搜索时,远程预警雷达利用导弹预警卫星提供的早期预警信息减小搜索范围,提高雷达搜索的效率,增强雷达的目标截获能力,如图3所示。
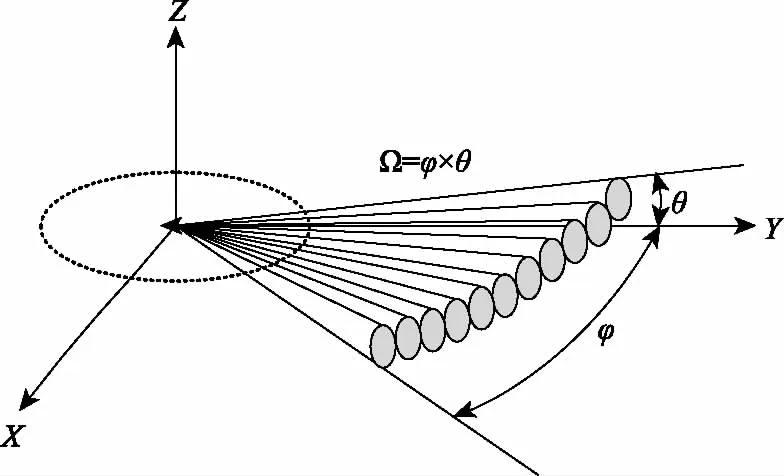
图3 预警雷达引导搜索示意图
为使导弹目标以接近概率1落入截获扇区,截获扇区的方位范围为:
[β-3σ,β+3σ]
其中,β为预警卫星的引导方位角,σ表示射向估计误差均方根。
3 协同引导效能分析
3.1 评价指标
分析预警卫星对远程预警雷达协同引导效能时,选取雷达搜索数据率、发现目标概率及跟踪容量来评价协同引导效能。
(a)搜索数据率
远程预警雷达搜索数据率为搜索时间的倒数,而搜索时间为天线波束按一定波束驻留时间对空域所有波束位置进行搜索所需的时间。
(b) 发现目标概率
远程预警雷达发现目标概率为存在目标时判定为有目标的概率,与漏报概率之和为1。
(c) 跟踪容量
远程预警雷达跟踪容量即在某种资源限制下雷达最大的目标跟踪数量。
3.2 搜索数据率分析
远程预警雷达搜索方程可表示为[4,7]:
其中,Ω为搜索空域立体角,Ts为搜索该空域的总时间:
Ω=φ×θ
式中,φ、θ分别为方位与仰角观测空域。
远程预警雷达搜索时间定义为[5]:
Ts=KφKθ(nsTr)
其中,Kφ、Kθ分别为搜索完φ、θ空域所需要的波束位置数目;nsTr为在每一个波束位置上的驻留时间,ns为在每一波束位置的平均重复周期数目。对于相控阵雷达搜索方式,在TS与Ω一定条件下,波束驻留时间nsTr受到限制。
KφKφ与天线波束半功率点宽度Δφ1/2Δθ1/2的关系近似为[6]:
Kφ=φ/Δφ1/2
Kθ=θ/Δθ1/2
远程预警雷达在有预警卫星引导信息时设置搜索屏方位和俯仰方向波位数分别为Kφ和Kθ。
则远程预警雷达搜索数据率Ds为:
波束半功率点宽度用下式计算:
其中,LALE分别为方位与俯仰方向的天线尺寸,与天线面积At关系为LALE=At,λ为信号波长。
3.3 发现目标概率分析
搜索距离的四次方与波束驻留时间成正比,因此应根据距离远近确定波束驻留时间。远距离的搜索需要较长的波束驻留时间,而近程搜索的波束驻留时间大大减少。
如果远程预警雷达只进行搜索不进行跟踪,则雷达两次搜索同一位置的时间与搜索时间相等。搜索完整个空域所需的时间ts可表示为[6]:
其中,Ω为雷达应完成搜索空域立体角球面度;ΔΩ为雷达天线波束宽度立体角;(nsTr)为在每一个波束位置上的驻留时间,ns为在每一波束位置的平均重复周期数目,Tr为信号重复周期。
远程预警雷达作用距离达到几千公里,相应每个波位上的驻留时间长达几十毫秒,以保证对远距离目标的捕获概率和不模糊测距。此时如果搜索监视的空域过大,搜索波位过多,则导致搜索帧周期过长而带来相当大的目标发现距离损耗。远程预警雷达对弹道导弹目标的搜索通过预设搜索屏的方式进行,这种方式要保证所关注的目标在进入雷达监视空域时都要先穿越所设置的搜索屏,雷达主要是在搜索屏内搜索检测到新目标,本质是在单帧或多帧积累后使某一波位的积累监测概率达到设定值[3]。如图4所示,导弹穿越预设的雷达搜索屏的时间与仰角范围Δε=ε1-ε2、目标距离R、目标速度v、目标飞行方向α有关,即
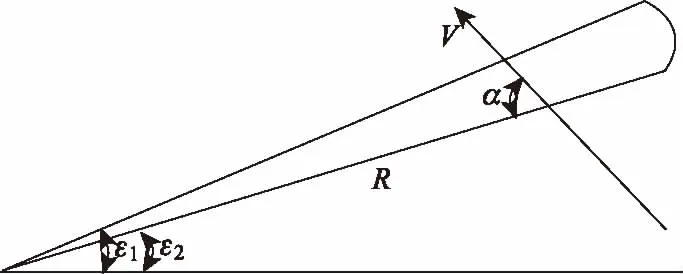
图4 导弹穿越搜索屏示意图
对预警雷达而言,通常Δt≥MTf,即在Δt内可对搜索屏进行M次搜索,且第i次搜索的监测概率为PDi=PD,则Δt内经过M次搜索的积累监测概率为:
导弹目标穿越搜索屏飞行过程中必须至少有2次以上被雷达波束照射机会,这样才能保证目标穿越搜索屏时有更高的雷达发现概率,因此波束驻留时间必须满足:
Δtp≥n·Ts
其中,波束照射次数n一般取2~3次。
3.4 跟踪容量分析
远程预警雷达常工作于搜索加跟踪TAS工作模式,采用“时间分割原理”实现TAS工作模式,在TAS工作方式下搜索时间间隔等于Tsi为[5]:
Tsi=Ts+Tt
式中Ts是搜索时间与Ttt是在搜索时间间隔内用于跟踪多批目标的全部时间。搜索时间与跟踪时间的不同分配,跟踪作用距离也不同。搜索数据率是搜索间隔时间的倒数,相控阵天线波束按一定波束驻留时间对空域内所有波束位置进行搜索需要Ts时长,即搜索时间,由于在搜索过程中必须实现对目标的跟踪照射,因此搜索间隔时间应大于或等于搜索时间,如图5所示。
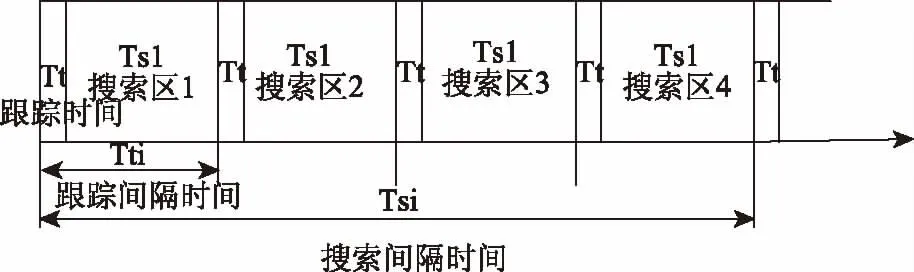
图5 搜索时间与跟踪时间分配示意图
为提高TAS工作模式下的跟踪距离,在搜索时间间隔Tsi保持一定的条件下,减少搜索空域与减少搜索时间Ts,都有利于增加用于跟踪的总时间Ttt,因而有利于增加跟踪作用距离,也即减小了跟踪数据率Dt。
搜索过程被分散在i个不同搜索时间段内完成,即总的搜索时间为:
搜索时间间隔tsi远大于跟踪间隔时间tti,故在tsi时间内要对目标进行多次跟踪照射,若跟踪间隔时间tti与跟踪波束驻留时间ntTr均相同,则在tti时间内用于对NTr个目标进行跟踪照射的总跟踪时间为:
故搜索间隔时间tsi应为:
为对搜索时间与跟踪时间有一个总的估计,设cs、ct分别表示搜索与跟踪方式的时间分配系数,即:
ts=cstsi
ttt=cttsi
tsi=(cs+ct)tsi
cs+ct=1
预警雷达在跟踪加搜索(TAS)模式下,能用于跟踪照射的跟踪波束驻留时间与跟踪照射次数分别为:
跟踪容量如下:
4 仿真试验
4.1 试验场景
以美国弹道导弹试验场景为例,设DSP导弹预警卫星部署于165°W,GBR-P雷达部署于夸贾林环礁导弹试验靶场(9.083°N,167.333°E),民兵Ⅲ弹道导弹导弹发射点为美国沃伦空军基地(41.14°N,104.87°W),导弹落点为夸贾林环礁导弹试验靶场,二三维仿真试验场景分别如图6和图7所示。
4.2 引导交接计算
针对从沃伦基地以标准弹道方式发射到靶场的民兵Ⅲ弹道导弹,DSP地球静止轨道导弹预警卫星对发射基地有效覆盖,GBR-P雷达首点截获方位角61.5°,设预警卫星系统提供导弹射向估计精度(RMSE)为15°。

图6 仿真试验场景二维图
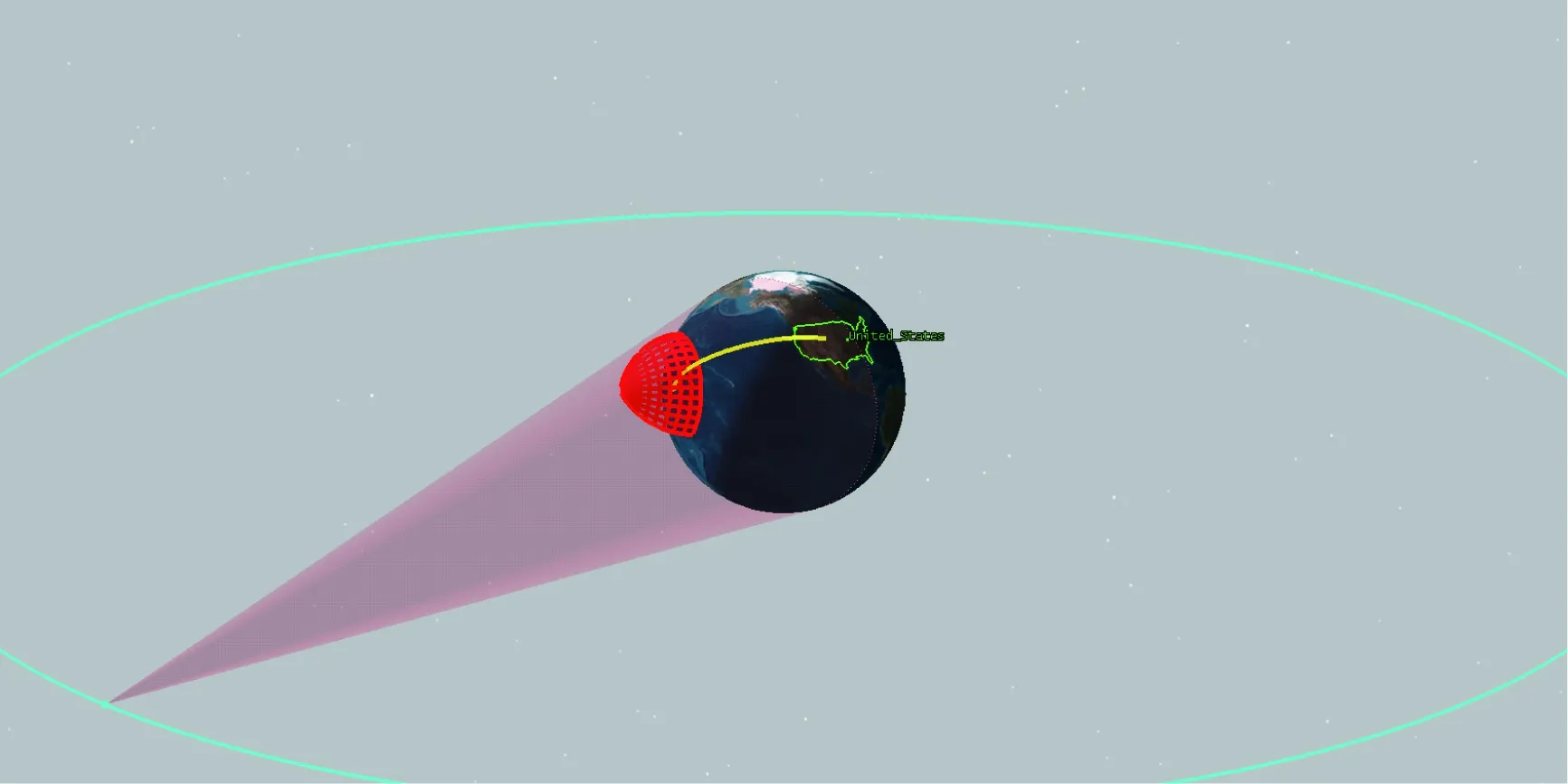
图7 仿真试验场景三维图
根据3σ原理,为使导弹目标以接近概率1落入截获扇区,截获扇区的方位宽度需在[φ-3σ,φ+3σ],其中φ表示预警卫星的引导方位角,σ表示预测方位角的均方根误差。通过计算,GBR-P雷达能够在方位角55.65°~67.35°之间截获目标。
在预警卫星提供早期告警的情况下,GBR-P雷达以搜索屏的方式在指定空域搜索目标。由前述可知,搜索屏方位范围在[55.65°,67.35°]内时能够以接近1的截获概率截获目标,在方位方向上设置9个波位,俯仰方向设置1个波位,即以11.7°×1.3°搜索屏截获目标。
4.3 自主搜索协同效能
4.3.1 搜索数据率
在无引导信息的情况下,GBR-P雷达以全方位120°覆盖的搜索警戒线方式监视空域,俯仰方向设置一个波位厚度。
根据GBR-P雷达性能参数,计算可得雷达信号重复周期Tr为20ms,波束平均重复周期数ns为3,该情况下,GBR-P雷达搜索时间Ts为:
则自主搜索模式下搜索数据率Ds为0.1087Hz。
4.3.2 发现概率
GBR-P雷达以全方位120°覆盖的搜索警戒线方式监视空域,俯仰方向设置一个波位厚度,仰角范围Δε为1.3°,导弹穿越搜索屏时速度v为4.866km/s、目标飞行方向α为43.541°,则穿屏时间为:
考虑搜索时间Ts为9.199s,则导弹穿屏时雷达对目标不能保证至少有1次波束扫描机会,则发现概率小于指标值,即在无引导信息情况下,雷达对导弹发现概率小于90%。
4.3.3 跟踪容量
GBR-P雷达工作于搜索加跟踪TAS工作模式,以全方位120°覆盖的搜索警戒线方式监视空域,俯仰方向设置一个波位厚度,同时保留部分资源用于跟踪多批目标。
在雷达搜索数据率为0.1Hz,即搜索间隔时间tsi为10s的条件下,由前述分析可知搜索时间为Ts为9.199s,则跟踪时间为:
ttt=tsi-tts=0.801 s
目标跟踪容量为:
即在无引导信息情况下,GBR-P雷达跟踪容量为8。
4.4 引导搜索效能
4.4.1 搜索数据率
计算在有预警卫星引导情况下的GBR-P雷达搜索时间:
因此雷达在有预警卫星引导情况下的搜索数据率Ds为1.11Hz。
4.4.2 发现概率
GBR-P雷达设置11.7°×1.3°搜索屏截获目标,导弹穿越搜索屏时速度v为4.866km/s、目标飞行方向α为43.541°,则穿屏时间为:
考虑搜索时间Ts为0.9s,则导弹穿屏时雷达对目标有4次以上波束扫描机会,则雷达在无引导时对目标发现概率计算为:
PDM=1-(1-PD)M=99.99%
即在预警卫星引导下,雷达对导弹发现概率为99.99%以上。
4.4.3 跟踪容量
GBR-P雷达工作于TAS工作模式,雷达设置11.7°×1.3°搜索屏截获目标,同时保留部分资源用于跟踪多批目标。
在雷达搜索数据率为0.1Hz,即搜索间隔时间tsi为10s的条件下,由前述分析可知搜索时间为Ts为0.9s,则跟踪时间为:
ttt=tsi-tts=9.1 s
目标跟踪容量为:
即在预警卫星提供引导信息情况下,雷达对目标跟踪容量为91。
5 结 语
预警卫星和远程预警雷达单独工作时对弹道导弹预警能力有限,通过预警卫星对预警雷达提供交接引导信息,确保预警信息连续、准确,以及最优的跟踪和识别效果。本文对预警卫星和预警雷达对弹道导弹探测流程进行了分析,给出了装备间协同探测交接引导计算方法,构建了预警卫星引导预警雷达评价指标,提供了装备协同探测效能评估方法,最后以美国弹道导弹试验为仿真场景,对预警卫星和预警雷达协同探测交接引导和协同效能进行了分析,通过仿真结果可知,在预警卫星提供概略引导信息情况下,远程预警雷达能够明显提升搜索数据率、发现概率和目标跟踪容量。
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
军民两用技术与产品(2021年10期)2021-03-16
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
学生天地(2018年19期)2018-09-07
海峡科技与产业(2016年3期)2016-05-17
中国农业文摘-农业工程(2016年5期)2016-04-12
舰船科学技术(2015年8期)2015-02-27
