基于H∞最优控制理论的粒子群优化算法在造纸定量控制中的应用
2018-09-10 19:58李二林淑怡张卫东
中国造纸 2018年4期
李二 林淑怡 张卫东


Abstract:Basis weight control system in paper manufacturing process is a high order nonlinear system with time delay and complicated interference. According to the characteristics of basis weight control system, this paper proposed a PSOPID parameters tuning method based on H∞ optimal control theory. By introducing the liner decreasing inertia weight ω to optimize the PSO′s global and local searching ability. Simulation results verified that the proposed strategy could find a group of PID tuning parameters efficiently, thereby reducing the searching scope. Furthermore, compared to conventional PID parameter tuning methods, this strategy had a better convergence rate and computation precision; robustness and response speed of the system were improved as well.
Key words:H∞optimal control theory; PID parameter tuning; particle swarm optimization; quantitative control
在工业生产过程中,比例积分微分(PID)控制策略在所有的控制策略中所占的比例超过90%。PID通过调整比例、积分和微分三项参数,使控制系统获得良好的闭环控制性能。目前存在许多PID 参数整定方法,如Zigler和Nichols 提出的ZN法,飞升曲线法,临界比例度法,衰减曲线法[1]等。这些传统方法计算过程繁琐,难以实现参数的最优整定,存在超调量大、调节时间长等缺点,且控制效果往往无法得到有效的保障。
造纸过程具有非线性、大时滞、强耦合等特性,生产过程往往会受到各种各样的干扰作用,如当浆料、化學品、添加剂的质量以及环境条件等的变化,工艺过程的模型参数也会随之发生变化, 传统PID参数整定方法很难满足控制要求,事先整定好的控制器参数在变化了的生产条件下会导致控制效果变差,甚至出现振荡现象。目前已提出了一些鲁棒PID控制器设计方法[2-4],通常对滞后时间小的系统有较好的控制效果,但对于大滞后过程无法获得令人满意的输出性能。对于大时滞系统,一般需要采用改进的Smith 预估控制算法[5-6]、动态矩阵控制算法[7]、广义预测控制算法[8-9]等。这些算法具有调节过程较快和扰动抑制能力强的特点,但是仍然很难克服造纸过程非线性、时变、耦合等诸多不利因素的影响。
经过不断改进,结合智能进化算法在PID参数整定实践中取得了传统优化算法无法比拟的结果,结合遗传算法的PID控制在许多应用场景中取得了较好的结果[10]。但遗传算法也存在着算法容易陷入局部最优、编码和解码过程计算量大和参数依赖性强等缺点。相比之下,粒子群优化算法(Particle Swarm Optimization, PSO)[11]以其简洁的原理、程序易于实现、参数调整较少等优点而被广泛应用于工程领域[12-14]。
1 造纸过程定量控制工艺
纸张品质好坏的评价包括纸的定量、水分、灰分、颜色等。定量表示单位面积纸的质量,以g/m2表示,定量波动越小,纸张就越均匀,质量就越好。定量控制分为横向(Cross Direction, CD)定量控制和纵向(Machine Direction, MD)定量控制。横向定量控制是由流浆箱稀释水阀来完成的;纵向定量控制是由上浆泵控制上浆流量来完成的。定量纵向波动产生的主要原因为:纸机速度的变化,上浆量的变化,浆料浓度的变化等。当纸机正常生产时,纸机车速是稳定的,因此考虑纵向定量控制时一般不考虑纸机速度的变化。当纸浆浓度发生变化时,定量就会产生偏差。储浆池送往流浆箱浆流量的变化是影响纸张纵向定量波动的最主要的原因,通常采用上浆管路上的调节阀在线添加稀释水,达到稳定纸浆浓度的目的。当纸浆浓度和车速一定时,纸张的定量取决于单位时间内上网浆流量的绝干量,因此,纸机的上浆是通过流量计输出控制变频泵上料来稳定上浆量的。
纵向定量控制系统如图1所示。由图1可知,以进入卷取前的定量控制环节为例,浆池的纸浆通过浆泵输送到配浆箱,根据扫描架测得的定量与设定值的差值,经过 QCS 系统进行计算,以输出控制变频泵上料的方式来稳定上浆量,达到纸定量稳定控制的效果。
纸张定量控制系统是一个非线性、大时滞、多阶的系统。流量、压力等非线性模拟量信号传递过程中容易受到电磁干扰,容易造成检测误差,进而影响控制系统的准确性;温度的变化,流量的抖动,阀门的磨损等时变性因素,使得过程对象与模型存在时变与不确定性;控制作用与过程响应间的时滞性会大大增加控制难度。鉴于此,寻找适合大时滞过程,对模型依赖小和鲁棒性强的算法是提高纸张抄造质量的关键。
PSO是一种新型的进化计算技术,能有效地找到优化问题的全局最优解,通过其对PID参数的优化可以使定量控制系统获得优良的控制效果。但是标准PSO可调参数较少,参数的调整易对算法的收敛性造成较大影响;同时,标准PSO的搜索空间多是依据经验设定, PID初始参数选择具有盲目性、搜索空间范围大和搜索效率低的缺点;另外,标准PSO也存在着易陷入局部最优解、后期收敛慢的缺点。为弥补其不足,提出一种改进的PSO,对PID控制器的参数进行优化。
3 PSO
PSO在鸟类群活动行为观察基础上,利用群体中个体对信息的共享使整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得最优解。该算法可以很大程度实现全局和局部优化,容易实现并且没有过多参数调节。
3.1 标准PSO简介
公式(22)表明,粒子的速度主要分为三部分:第一部分反映了对上一次速度的继承,乘以惯性权重表示粒子由于自身的惯性而继续运动;第二部分是自我认知,是粒子对自身的思考,表示自身对历史最优值的靠近;第三部分是社会部分,表示粒子群之间的信息共享与合作,是对群体最好位置的靠近。PSO首先初始化一群随机粒子,通过粒子群在解空间内追随最优的粒子飞行,在每一次的迭代中,粒子通过跟踪两个“极值”(Gt,Xt)更新粒子的当前位置,在迭代过程中,不断改变其在解空间内的速度和方向,直到找到最优解。在寻求最优解的认知过程中,粒子不仅积累自己的经验,同时其他同伴的经验也会影响各个粒子的搜索行为。粒子在纵向上向自身的历史最好看齐,在横向上向好的同伴学习,最终种群的搜索方向取向一致。在每一维,粒子都有一个最大限制速度vmax,如果某一维的速度超过设定的vmax,那么这一维的速度就被限定为vmax。最大速度vmax决定当前位置与最好位置之间的区域分辨率(或精度)。如果太快,则粒子有可能越过极小点;如果太慢,则粒子不能在局部极小点之外进行足够的探索,会陷入到局部极值区域内。这种限制可以达到防止计算溢出、决定问题空间搜索的粒度的目的。其中,当C1=0时,则粒子没有了认知能力,变为只有社會的模型,被称为全局PSO。粒子有扩展搜索空间的能力,具有较快的收敛速度,但由于缺少局部搜索,对于复杂问题比标准PSO更易陷入局部最优。当C2=0时,则粒子之间没有社会信息,模型变为只有认知模型,称为局部PSO。该算法由于个体之间没有信息的交流,整个群体相当于多个粒子进行盲目的随机搜索,收敛速度慢,因而得到最优解的可能性小。由公式(22)和公式(23)作为基础形成了PSO 的标准形式。
3.2 基于PSO改进策略
PSO的参数改进主要集中在速度更新公式(22)中,其中学习因子的调节、惯性权重的调节是改进PSO的关键。一般说来,对于一个优化算法,就是在开始时有较强的能力找到一个较好的可行解,然后在可行解附近搜索最优解。因此选择合适的惯性权重因子ω,有利于平衡PSO全局和局部的寻优能力,提高算法性能。
当惯性权重因子ω大,利于全局搜索和算法的收敛速度,但削弱了算法的局部搜索能力,不容易得到最优解;当惯性权重ω小,便于局部搜索,易于找到局部最优解,而错失全局最优解。为了使PSO的计算速度和全局最优,SHI等人[20]采用LDIW策略,即在PSO迭代过程选择线性递减的策略,惯性权重ω的值设置为从初始0.9到末期的0.4。在算法开始时具有良好的全局寻优能力,在后期具备良好的局部寻优能力。惯性权重线性递减如公式(24)。
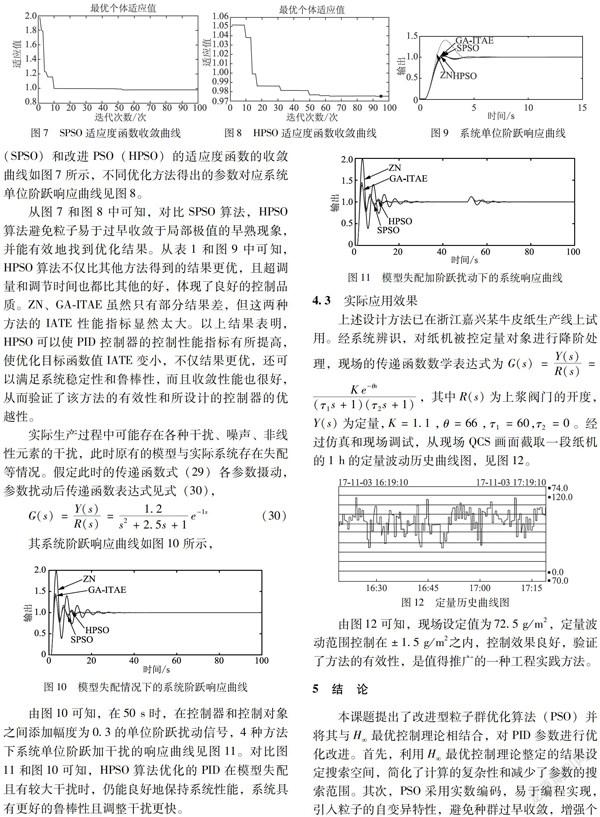
从图7和图8中可知,对比SPSO算法,HPSO算法避免粒子易于过早收敛于局部极值的早熟现象,并能有效地找到优化结果。从表1和图9中可知,HPSO算法不仅比其他方法得到的结果更优,且超调量和调节时间也都比其他的好,体现了良好的控制品质。ZN、GAITAE虽然只有部分结果差,但这两种方法的IATE性能指标显然太大。以上结果表明,HPSO可以使PID控制器的控制性能指标有所提高,使优化目标函数值IATE变小,不仅结果更优,还可以满足系统稳定性和鲁棒性, 而且收敛性能也很好,从而验证了该方法的有效性和所设计的控制器的优越性。
由图10可知,在50 s时,在控制器和控制对象之间添加幅度为0.3的单位阶跃扰动信号,4种方法下系统单位阶跃加干扰的响应曲线见图11。对比图11和图10可知,HPSO算法优化的PID在模型失配且有较大干扰时,仍能良好地保持系统性能,系统具有更好的鲁棒性且调整干扰更快。
4.3 实际应用效果
上述设计方法已在浙江嘉兴某牛皮纸生产线上试用。经系统辨识,对纸机被控定量对象进行降阶处理,现场的传递函数数学表达式为G(s)=Y(s)R(s)=Ke-θs(τ1s+1)(τ2s+1),其中R(s)为上浆阀门的开度,Y(s)为定量, K=1.1,θ=66, τ1=60,τ2=0。经过仿真和现场调试,从现场QCS画面截取一段纸机的1 h的定量波动历史曲线图,见图12。
参 考 文 献
[1] KNOSPE C. PID control[J]. IEEE Control System Magazine, 2006, 26(1): 30.
[2] Tan W. Unified tuning of PID load frequency controller for power systems via IMC[J]. IEEE Transactions on power systems, 2010, 25(1): 341.
[3] Alcántara S. IMClike analytical View the MathML source design with S/SP mixed sensitivity consideration: Utility in PID tuning guidance[J]. Journal of Process Control, 2011, 21(6): 976.
[4] ZHAO Qianmei, CHEN Shuaishuai, HU Muyi, et al. The Expertfuzzy PID Control System of Pulp Concentration[J]. China Pulp & Paper, 2015, 34(12): 53.
赵倩梅, 陈帅帅, 胡慕伊, 等. 纸浆浓度的专家模糊PID控制系统[J]. 中国造纸, 2015, 34(12): 53.
[5] Zhang Weidong, He Xing, Xu Xiaoming. Smith Predictor Design for SelfRegulating and NonselfRegulating Plants[J]. ActaAutomatica Sinica, 2000, 26(4): 485.
张卫东, 何 星, 许晓鸣. 自衡和非自衡时滞对象Smith 预估器解析设计[J]. 自动化学报, 2000, 26(4): 485.
[6] ZHENG Enrang. Control on Smith Controller of Papermaking Process Water and Basis Weight[J]. Control and Instruments in Chemical Industry, 2002, 22(3): 19.
郑恩让. 基于Smith预估器的抄纸过程水分定量控制[J]. 化工自动化及仪表, 2002, 22(3): 19.
[7] LIU Tao, HUANG Jingtao, ZHANG Xiangyang, et al. A Dynamic Matrix Control Algorithm with Delayed Model Prediction Error[J]. Computer Simulation, 2015, 32(8): 347.
刘 涛, 黄景涛, 张向阳, 等. 基于模型预测误差延迟动态矩阵控制算法[J]. 计算机仿真, 2015, 32(8): 347.
[8] Song Chonghui, Chai Tianyou. A weighted predictive Control Algorithm with Guaranteed Stability[J]. ActaAutomatica Sinica, 2004, 30(6): 807.
宋崇辉, 柴天佑. 一类具有稳定性的广义预测控制算法[J]. 自动化学报, 2004, 30(6): 807.
[9] JIANG Suying, ZHENG Enrang. Predictive Control of Quantification and Moisture System in Paper Process[J]. Computer Simulation, 2015, 32(10): 350.
姜苏英, 鄭恩让. 抄纸过程定量水分系统的预测控制[J]. 计算机仿真, 2015, 32(10): 350.
[10] ShiFeng, Wang Hui, Yu Lei, et al. 30 Case Studies of Matlab Intelligent Algorithm[M]. Beijing: Beihang University Press 2011.
史 峰, 王 辉, 郁 磊, 等. MATLAB智能算法30个案例分析[M]. 北京: 北京航空航天大学出版社, 2011.
[11] Kennedy J, Eberhart R C. Particle Swarm Optimization[C]. Proceedings of IEEE International Conference on Neural Networks, Perth, Australia, 1995.
[12] Eberhart R C, Shi Y. Particle swarm optimization: Developments, applications and resources[C].Congr. Evol. Comput, 2001(1), 81.
[13] CHEN Qianyu, CHEN Weirong, DAI Zhaohua, et al. Reactive Power Optimization Based on Modified Particle Swarm Optimization Algorithm for Power System[J]. Proceedings of the CSUEPSA, 2014, 26(2): 8.
陈前宇, 陈维荣, 戴朝华, 等. 基于改进PSO算法的电力系统无功优化[J]. 电力系统及其自动化学报, 2014, 26(2): 8.
[14] Wang Qingyan, Ma Hongzhong, Cao Sheng. Application of Multi Strategy particle swarm optimization in magnetic levitation bearing machine[J]. Proceedings of the Chinese society of electrical engineering, 2014, 34(30): 5416.
王庆燕, 马宏忠, 曹生让. 多策略粒子群算法在磁悬浮承重装置中的应用[J]. 中国电机工程学报, 2014, 34(30): 5416.
[15] Yang Z, Chen Z T, Fan Z P, et al. Tuning of PID controller based on improved particleswarmoptimization[J]. Control Theory & Applications, 2010, 27(10): 1345.
杨 智, 陈志堂, 范正平, 等. 基于改进粒子群优化算法的PID控制器整定[J]. 控制理论与应用, 2010, 27(10): 1345.
[16] ZHANG Weidong. Research on Analytical Design Method of Process control[R]. Shanghai: Postdoctoral Research Report of Shanghai Jiao Tong University, 1998.
张卫东. 过程控制解析设计方法研究[R]. 上海: 上海交通大学博士后研究工作报告, 1998.
[17] OU Linlin, ZHANG Weidong, GU Danying. The Robustness Analysis of Firstorder Systems with Time Delay under PID Control[J]. Journal of Shanghai Jiao Tong University, 2006(11): 1.
欧林林, 张卫东, 顾诞英. PID控制作用下一阶时滞系统的鲁棒稳定性分析[J]. 上海交通大学学报, 2006(11): 1.
[18] Zhang W D. Quantitative Process Control Theory[C]. CRC Press, 2011. 77.
[19] Ou L, Zhang W, Gu D. Sets of Stabilising PID Controllers for Secondorder Integrating Processes with Time Delay[J]. IEE ProceedingsControl Theory and Applications, 2006, 153(5): 607.
[20] Shi Y, Ebethart R C. Empirical study of Particle swarm ptimization. Evolutionary Computation, 1999[C]. Washington DC: IEEE Service Center, 1999.
[21] CHEN Guimin, JIA Jianyuan, HAN Qi. Study on the Strategy of Decreasing Inertia Weight in Particle Swarm Optimization Algorithm[J]. Journal of Xi′an Jiao Tong University, 2006, 40(1): 53.
陳贵敏, 贾建援, 韩 琪. 粒子群优化算法的惯性权值递减策略研究[J]. 西安交通大学学报, 2006, 40(1): 53.
[22] Ni Ruijun. Research on Improved Particle Swarm Optimization Algotithm for Power transmission network expansion planning[D]. Hangzhou: Zhejiang University, 2013.
倪瑞君. 基于改进粒子群算法的输电网扩展规划研究[D]. 杭州: 浙江大学, 2013.
[23] ZHAN Feng, WEI Xing, GUO Jianquan, et al. PID Parameters Tuning based on Improved PSO Algorithm[J]. Power System Protection and Control. 2005, 33(19): 23.
湛 锋, 魏 星, 郭建全, 等. 基于改进粒子群优化算法的PID参数整定[J]. 电力系统保护与控制, 2005, 33(19): 23.
(责任编辑:吴博士)
猜你喜欢
山花(2022年5期)2022-05-12
中学生数理化·高一版(2022年4期)2022-05-09
散文诗(2020年1期)2020-07-20
电子技术与软件工程(2018年12期)2018-02-25
分析化学(2018年12期)2018-01-22
东方艺术·国画(2016年3期)2017-02-08
中学生数理化·高一版(2016年8期)2016-12-07
软件(2016年3期)2016-05-16
飞碟探索(2015年8期)2015-10-15
学生天地·初中(2009年5期)2009-06-29