基于STC154K单片机的可见光室内定位装置
2018-09-10 04:37:10王江明杨旭辉韩根亮
天津中德应用技术大学学报 2018年6期
关键词:室内定位
王江明 杨旭辉 韩根亮


摘 要:对室外定位常采用GPS来实现,但是对于室内位置由于信号比较弱而无法准确定位。为了准确确定室内位置,采用可见光室内定位,将光照和位置相联系。相比传统的室内无线定位装置,可见光室内定位装置有更多的优势和应用价值。通过16位的数字型环境强度传感器BH1750FVI对经PWM调制过的光信号进行采集,应用154单片机将光信号自动转化成位置信号,精度在3cm以内,达到了预期的效果。
关键词:LED灯;室内定位;PWM调制
中图分类号:TN29 文献标识码:A 文章编号:2096-3769(2018)06-059-04
当前,随着GPS(全球定位系统)在汽车导航、地图定位等多个领域的广泛应用,给人的出行以及生活带来了很多方便。但是对室内的一些场所,比如大型停车场、博物馆、地下超市等室内建筑采用GPS定位效果不是很好。因为目前的建筑墙面都采用钢筋混凝土结构,当无线电信号通过时会发生各种衰减,同时会受到室内一些信号的电磁干扰,从而影响准确定位。因此,室内定位技术已成为研究的热点,目前比较成熟的定位技术有基于红外线的定位技术、超声波定位技术、基于超宽带的定位技术和射频识别定位技术,但是它们都存在一定的局限性。而采用可见光室内定位具有很多的优势,用大功率和高强度的LED灯作为光源,不但可以照明还可以通信,将设在不同位置的光源信号转换为准确的位置。因此,可见光室内定位技术有很大的前景和研究价值。
一、系统方案
1.定位方法工作原理
本系统采用移动检测定位法,分析 3 个 LED 灯的最佳拓扑结构。3 个 LED 灯分别用磁铁装配在木箱顶部,可通过随意移动,确定最佳的定位源位置。类比三边定位的思想,将距离量引申为光照强度。通过传感器采集 3 个 LED 灯的光照强度,对比记录 256 个测试点的数据,反复测试5次,取平均值,建立离线光照强度数据库。并通过单片机程序,将光照强度与坐标位置进行对照,最终确定精确的位置。采用偏差弥补法结合自适应的系统,精准定位传感器位置,防止环境因素对系统造成巨大影响。
2.三边测量定位算法
三边测量定位算法是一种最常用的定位算法。已知三点位置为 (x1,y1),(x2,y2),(x3,y3),未知点 (x0,y0) 到三点距离为 d1,d2,d3,以 d1,d2,d3 为半径作三个圆,根据毕达哥拉斯定理,得出交点即未知点的位置計算公式:(x1-x0)2+(y1-y0)2=d12(x2-x0)2+(y2-y0)2=d22(x3-x0)2+(y3-y0)2=d32
设未知点位置为(x, y),令其中的第一个球形 P1的球心坐标为(0, 0),P2处于相同纵坐标,球心坐标为(d, 0),P3球心坐标为(i, j),三个球形半径分别为r1,r2,r3,z为三球形相交点与水平面高度。则有:
r12=x2+y2+z2 r22=(x-d)2+y2+z2 r32=(x-i)2+ (y-j)2+z2
当z=0时,即为3个圆在水平面上相交为一点,首先解出x:x=(r12-r22+d2)/2d将公式二变形, 将公式一的 z2 代入公式二,再代入公式三得到 y 的计算公式:
y=(r12-r32-x2+(x-i)2+j2)/2j
3.信息发送接收方法
首先,键盘输入数字,经 PWM 调控技术,对应 3 个 LED 灯的亮度值。其次,传感器通过 LED 灯的发光强度,感应传输进入单片机。最后经单片机程序对应转换,精确输出 3 个 LED 发送的数字信息。脉冲宽度调制技术控制简单、灵活和动态响应好,是用微处理器的数字输出对模拟电路进行控制的一种非常有效的技术,从处理器到被控系统信号都是数字形式的,无需进行数模转换,减少干扰,精确定位。
4.抗干扰方法
自然光影响传感器的感应精度,因此需尽量增加3个LED 灯的亮度;对单片机I/O 口在不改变系统逻辑的情况下,避免悬空全部接地或接电源。由于此系统易受其他光源的干扰,在继电器接点两端并接抑制电路;为防止其他干扰,需稳定电源输入,且做到电源隔离、数模隔离、地线加粗、电源线加粗等。
二、总体设计
本系统采用 154K 系列的单片机作为控制器。此系列单片机功能强、自由度大、软件编程灵活,可用软件简单地实现各种算法和逻辑控制。系统主要由 LED 控制系统和接收测量系统组成。采用光强度传感器作为白光 LED 信号接收器,经单片机程序控制将光照强度自行转化成位置信息存储。最后,通过连续获得的多组坐标信息,结合实际的环境信息,取平均数据推算得到传感器的所属区域及坐标。设计框图如图1所示。
1.模块选择
电源模块。由于线性直流稳压电源模块体积小、质量轻,且电压稳定、纹波较小、功耗小、高效率,完全可以满足整个系统的供电需求。因此,系统采用线性直流稳压电源,原理图如图2所示。
显示模块。采用 LCD 液晶屏显示。液晶显示屏具有功耗低、高分辨率、平面直角显示、抗干扰能力强以及影像稳定等优点,且可视面积大,显示内容多。此外,液晶显示器与单片机可直接相连,电路设计及连接简单。采用 LCD 液晶屏进行菜单显示,可使整个控制系统更加人性化。
传感器模块。光强度传感器模块选择 16 位数字输出型环境光强度传感器 BH1750FVI 作为接收系统,光强度传感器可以根据收集的光线强度数据,对区域进行辨别。再经单片机处理,可直接显示数字化量,操作简单方便,实用性极强。此外,其具有高分辨率、光源依赖性弱、误差变动低等优点,符合系统设计要求。原理框图如图3所示。
低通滤波模块。为了减少干扰信号对系统信号的影响,尽可能使信号不失真,得到高质量的信号,对数模转换后的模拟信号采用滤波电路进行处理,硬件滤波电路采用二阶无源RC低通滤波电路,电路原理图如图4所示。
2.电路设计
LED 驱动电路。系统中LED采用贴片式 LED 灯,无需暖灯时间,点亮响应速度较快,电光转换效率高、耗电量小、耐震性佳、可靠度高,且系统运转成本低。驱动电路如图5所示:
音频放大电路。由于测量电路得到的模拟信号经过 A/D、D/A 转化后输出功率很小,扬声器无法被带动起来,因此对其还要进行功率放大,以得到足够的不失真的输出音频。本设计中音频功放采用集成芯片 LM386,为使外围元件最少,则在 1 脚和 8 脚之间加一只外接电阻和电容,使电压增益调为 200,最终可达到放大的效果且接收的语音信号均无明显失真。电路如图6所示:
3.程序设计
根据系统设计要求,先对系统进行初始化,之后不断查询键盘的输入值通过单片机来控制灯的强度,并转化为数字量。再通过光强度传感器采集光的强度最终转化为具体的位置,将信息值在液晶屏上显示出来。设计流程图如图7所示:
三、测试方案与测试结果
1.测试方案
改变3个LED 灯的拓扑结构,进行结构微调,并同时将程序下载到单片机中,进行测试。接着,将传感器置于室内任意位置,通过液晶屏读取数据、记录数据、处理数据并分析误差原因,再由键盘输入阿拉伯数字,对比液晶屏显示的数字信息进行分析。由 MP3输入三路音频信号源,确保任意选择一路进行播放,且用示波器观察语音信号的输出波形,最后接入+12V单电源供电,控制 LED 灯发光,测试其供电功率。
2.测试结果与分析
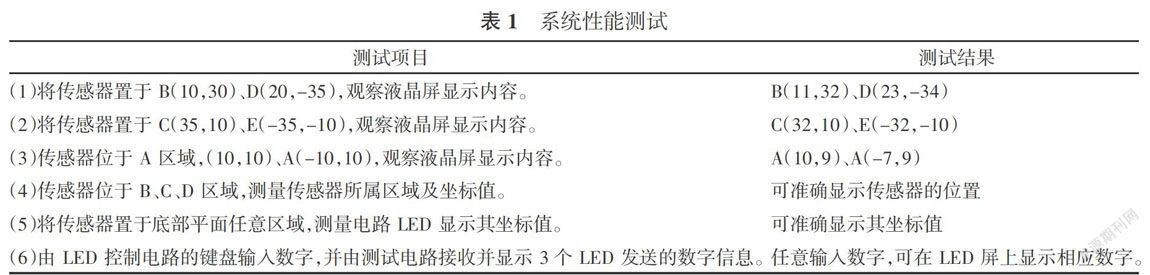
经多点测试,此系统可以准确定位传感器所属区域及坐标,根据绝对误差=|测量值-真实值|进行计算,得出绝对误差小于3cm;与此同时,LED 显示坐标值的分辨率为0.099cm;当键盘输入数字“0-9”后,液晶屏能准确显示 LED 灯发送的数字信息;当输入 3 路音频信号时,可完成题目要求且在液晶屏上显示为哪一路输出;当 LED 控制电路达到 12V 供电时,供电功率为 3.7W。具体测试数据见表 1。
由上述测试结果可以看出,系统可以实现室内定位的功能,满足题目中的所有要求,且电路设计经济简洁、实用性强,但由于定位系统的局限性以及非全封闭空间易受到外界光照的影响,电路虚焊、电阻分布不均匀等诸多因素导致产生了误差。
设计了这种基于STC154K单片机的可见光室内定位装置,通过硬件设计和软件编程,采用移动检测定位法,通过传感器采集光照信号转化为具体位置。实验结果表明能够准确定位,系统也比较稳定,误差控制在3cm以内,达到了预期的效果。
参考文献:
[1]顧嘉,钱钰博,孙厚芳,王婧.工装室内定位技术研究[J].北京理工大学学报,2010(9):1056-1058.
[2]齐立磊,梁智学,冯高峰.一种基于高频RFID的室内定位方法的设计与实现[J].计算机与数字工程,2013(4):673-675.
[3]孙肖子,邓建国.电子设计指南[M].北京:高等教育出版社,2006.
[4]吴楠,王旭东,胡晴晴,何荣希.基于多LED的高精度室内可见光定位方法[J].电子与信息学报,2015(3):727-732.
[5]王学仁.基于LED的CCD校准用光源的设计[D].西安工业大学,2011.
[6]沈芮,张剑.基于可见光通信的室内定位方法[J].信息工程大学学报,2014,15(1):41-45.
[7]汪苑,林锦国.几种常见室内定位技术的探讨[J].中国仪器仪表,2011(2):54-57.
[8]高燕龙,施安存,张运方,等.基于白光的LED室内高精度定位算法的实现[J].半导体光电,2015(1):141-144+14.
Indoor Positioning Device of Visible Light Based on
STC154K Single Chip
WANGg Jiang-ming1,2, YANG Xu-hui2, HAN Gen-liang2
(1.Pingliang Information Engineering School,Pingliang 744000,China;
2.Institute of Sensor, Gansu Academy of Sciences, Lanzhou 730000, China)
Abstract: GPS is often used for outdoor positioning, but the positioning of the indoor location is usually not accurate because of the weak signal. In order to determine the indoor location accurately, indoor positioning based on visible light is used to connect the light with the position. Compared with the traditional indoor wireless positioning device, the visible light indoor positioning device has more advantages and value of practical application. The PWM-modulated optical signal is collected by a 16-bit digital ambient intensity sensor BH1750FVI, and the optical signal is automatically converted into a position signal by using a 154 single-chip microcomputer with an accuracy of less than 3 cm, and the expected effect is achieved.
Key Words: LED Lamp; Indoor Positioning; PWM Modulation
猜你喜欢
科技与创新(2017年1期)2017-02-16 19:22:56
软件(2016年4期)2017-01-20 09:23:15
科技视界(2016年25期)2016-11-25 20:33:17
电脑知识与技术(2016年25期)2016-11-16 14:58:08
电脑知识与技术(2016年23期)2016-11-02 22:41:36
中国科技博览(2016年18期)2016-10-19 06:43:40
电脑知识与技术(2016年21期)2016-10-18 23:35:56
电脑知识与技术(2016年9期)2016-05-18 14:17:02
中国科技博览(2016年5期)2016-04-23 20:33:31
无线互联科技(2015年5期)2016-03-04 20:53:24