
基于光纤陀螺的大坝安全监测随机漂移误差
2018-09-10 15:55向超蔡德所沈玮
人民黄河 2018年6期
关键词:安全监测
向超 蔡德所 沈玮

摘 要:光纤陀螺仪是在面板堆石坝面板挠度变形监测中应用的一种新型仪器,它在预先埋设的管道中运行。随机漂移是捷联惯导系统在大坝安全监测中运用的主要误差源,为了有效减小光纤陀螺的误差,需要对光纤陀螺的随机误差建立模型。根据时间序列建模基本原理,建立自回归滑动平均模型( ARMA),在此基础上运用卡尔曼滤波算法对光纤陀螺随机漂移信号进行滤波降噪。滤波结果和Allan方差分析表明,滤波效果较好,光纤陀螺的精度得到提高,能更好地反映大坝运行的真实情况,从而为大坝运行状况的客观评价提供可靠依据。
关键词:安全监测:光纤陀螺;随机漂移;ARMA模型;面板堆石坝
中图分类号:TV698.1
文献标志码:A
doi:10.3969/j.issn.1000- 1379.2018.06.032
随着大坝建设中坝体的不断增高,大坝监测周期持续延长,面板堆石坝的面板挠度变形监测显得尤为重要。面板挠度在蓄水初期向凌空面变形,随着蓄水逐渐增多,逐渐回落向坝体内部变形,最后向坝体内部整体回落。常规仪器监测往往以点式监测为主,使用寿命较短,所以急需寻找一种新的仪器进行有效的安全监测。光纤陀螺系统具有造价低、连续分布式监测、使用寿命长等优点,具有重要的工程应用价值[1-5],已经在思安江、水布垭、猴子岩等面板堆石坝取得了丰硕的监测成果,但是受其自身特性的影响,在监测数据采集过程中易产生随机漂移。为减少光纤陀螺的随机漂移误差,根据时间序列建模的原理,建立自回归滑动平均模型,再用卡尔曼滤波算法对随机漂移信号进行滤波降噪,从而达到减少随机漂移误差的目的。
1 时间序列建模
1.1 时间序列建模基本原理
设{X(t)}为平穩、正态、零均值的时间序列,在t
模型描述:在t时刻观测值xt的输出与之前p个时刻的观测值和t时刻进入系统的扰动存在关系,与之前进入系统的扰动无关。
若令ψi=0(i=1,2,3,…,p),则ARMA(p,q)模型转变为滑动平均模型MA(q):
模型描述:在t时刻观测值xt的输出与受到t时刻和之前q个时刻进入系统的扰动有关,与之前的观测值无关。
综上所述,AR(p)模型和MA(q)模型均为ARMA(p,q)模型的特殊情况。
1.2 模型识别
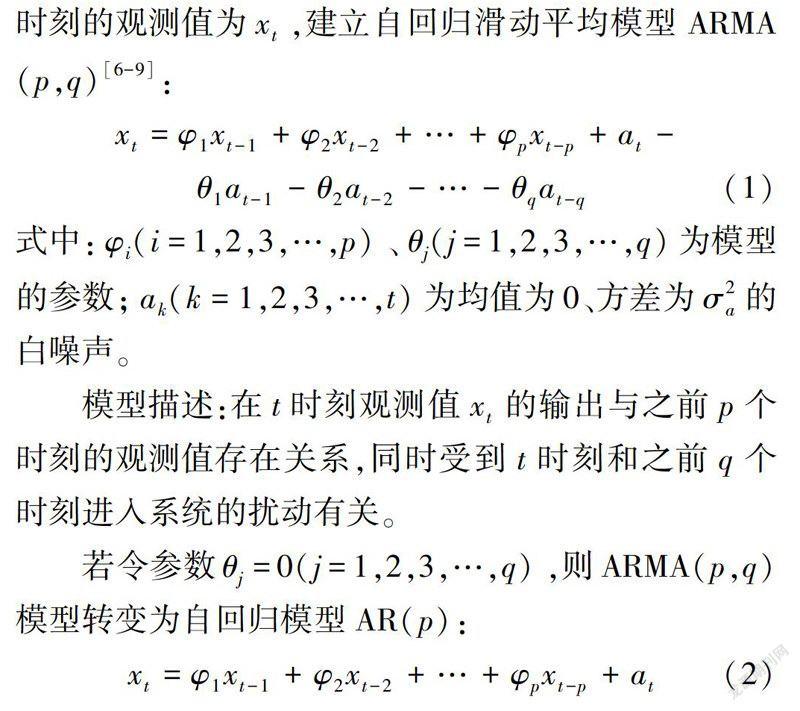
本次试验的光纤陀螺仪为单轴陀螺仪,是由光纤陀螺和加速度计组成的捷联惯导系统,其采样频率为300 Hz,标度因数为52 114.7。选取20 min的稳定信号序列X(t),共计360 000个数据,原始波形见图1。
根据时间序列模型的特点,应用平稳时间序列的自相关函数和偏自相关函数的性质,可以识别平稳时间序列的模型。平稳时间序列{X(t)}的自协方差函数为
通过计算平稳时间序列{X(t)}的自相关系数和偏相关系数,根据3种时间序列模型的特性(表1),可以对平稳时间序列{X(t)}适用的模型进行识别。
由表1可知,若计算出{X(t)}的自相关系数拖尾,且偏相关系数在k=p处截尾,则为AR(p)模型;若自相关系数在k=q处截尾,偏相关系数拖尾,则为MA(q)模型;若偏相关系数和自相关系数均拖尾,则为ARMA(p,q)模型,其模型阶数需另外求解。
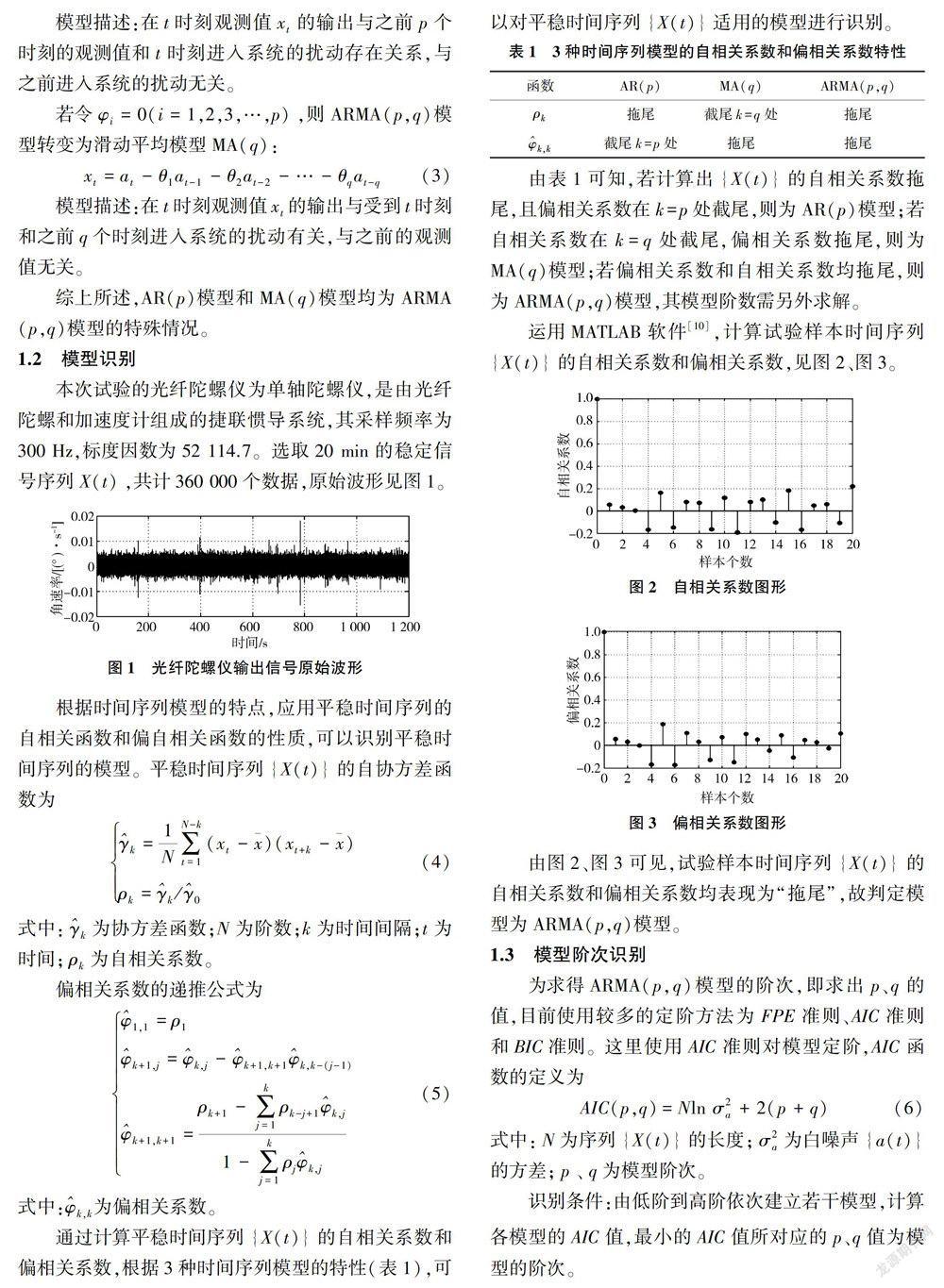
运用MATLAB软件[10],计算试验样本时间序列{X(t)}的自相关系数和偏相关系数,见图2、图3。
由图2、图3可见,试验样本时间序列{X(t)}的自相关系数和偏相关系数均表现为“拖尾”,故判定模型为ARMA(p,q)模型。
1.3 模型阶次识别
为求得ARMA(p,q)模型的阶次,即求出p、q的值,目前使用较多的定阶方法为FPE准则、AIC准则和BIC准则。这里使用AIC准则对模型定阶,AIC函数的定义为
识别条件:由低阶到高阶依次建立若干模型,计算各模型的AIC值,最小的AIC值所对应的p、q值为模型的阶次。
根据光纤陀螺随机漂移序列模型一般不超过3阶的经验,对样本{X(t))分别建立以阶次p=0,1,2,3和q=0,1,2,3的ARMA(p,g)模型,并分别计算其AIC值,见表2。
图5与图4对比可见,运用卡尔曼滤波算法对光纤陀螺随机漂移信号进行滤波之后,随机漂移的幅度明显减小,幅值原来约为6×10 -3,滤波后变为5×10 -3,且滤波前漂移信号的方差为1.87×10 -6,滤波后变为7.22×10 -7。采用Allan方差法对滤波前和滤波后的光纤陀螺输出信号进行分析可知(表3),由于光纤陀螺自身精度比较高,因此其输出信号的角度随机游走、零偏不稳定性、角速率随机游走、速率斜坡、量化噪声均很小且经过滤波之后速率斜坡及量化噪声降低了一半左右。
3 工程应用
猴子岩面板堆石坝是世界上同类型的第二高坝,坝顶高程1 848.5 m,最大坝高223.5 m。以猴子岩面板堆石坝1 805 m高程、0+117.5断面的坝体沉降监测为例,采用光纤陀螺仪和水管式沉降仪两种仪器进行监测。图6是蓄水前和蓄水过程中两种监测仪器的监测结果对比。
由图6可以看出,光纤陀螺监测系统所监测的沉降曲线与水管式沉降仪的测点沉降曲线具有较好的重合性,说明运用光纤陀螺监测大坝沉降变形趋势与常规仪器相一致,且沉降曲线符合大坝变形规律,测量精度较高。
4 结语
本文研究了光纤陀螺的随机误差,运用时间序列ARMA对光纤陀螺随机漂移建模,采用Kalman滤波算法对光纤陀螺信号进行滤波,结合Allan方差对滤波后的数据进行分析。分析结果表明,光纤陀螺的随机漂移误差明显减小,精度得到有效提高。工程应用表明,用光纤陀螺系统监测面板堆石坝变形能够较好地反映面板堆石坝的真实运行情况,为大坝的安全评价提供可靠依据。
参考文献:
[1] 廖铖,蔡德所,李苗,等,基于光纤陀螺的水布垭水电站大坝面板挠度变形规律分析[J].水利水电技术,2015,46(11):97-100.
[2]王德厚,大坝安全与监测[J].水利水电技术,2009,40(8):126-132.
[3] 郦能惠,高混凝土面板堆石坝设计理念探讨[J].岩土工程学报,2007,29(8):1143-1150.
[4] 秦鹏,光纤陀螺系统在水布垭工程中的应用及系统升级研究[D].宜昌:三峡大学,2014:2-12.
[5] 蔡德所,李昌彩,卫炎,等,三维光纤陀螺系统分布式测量思安江面板堆石坝挠度[J].水力发电学报,2006,25(4):79-82.
[6] 霍元正.MEMS陀螺仪随机漂移误差补偿技术的研究[D].南京:东南大学,2015:19- 24.
[7]郭港,光纤陀螺随机误差辨识及信号处理技术研究[D].北京:中国科学院研究生院(光电技术研究所),2016:41-47.
[8] CHEN Xiyuan. Study on FOG-SINS/GPS Integrated AttitudeDetermination System Using Adaptive Kalman Filter[J].Springer-Verlag, 2006(1):417-425.
[9] 陳永冰,查峰,刘勇,光纤陀螺随机误差的重叠分段Allan分析方法[J].中国惯性技术学报,2016(2):235-241.
[10] 韩路跃,杜行检,基于MATLAB的时间序列建模与预测[J].计算机仿真,2005,22(4):105-107.
[11] 吕常波,陈晓曾,翟永波,小波滤波在光纤陀螺信号处理中的应用[J].中国西部科技,2010(6):24-25.
[12] 巫大利,孙付平,李海峰,等,激光陀螺随机漂移的渐消Kalman滤波[J].电光与控制,2011(3):91-93.
[13] 李家垒,许化龙,何婧,光纤陀螺信号的小波包去噪及改进[J].光学学报,2010(8):2224-2228.
[14] 任春华,熊林香,赵雪江,等,小波阈值滤波在光纤陀螺信号处理中的应用[J].压电与声光,2010(6):957—959.
[15] 袁瑞铭,孙枫,陈慧,光纤陀螺信号的小波滤波方法研究[J].哈尔滨工业大学学报,2004(9):1235-1238.
猜你喜欢
职工法律天地·下半月(2017年2期)2017-02-20
中国高新技术企业(2016年35期)2017-02-10
现代电子技术(2016年24期)2017-01-19
建材发展导向(2016年6期)2017-01-17
东方教育(2016年15期)2017-01-16
科技视界(2016年6期)2016-07-12
科技视界(2016年13期)2016-06-13
物联网技术(2015年10期)2015-11-10
中国高新技术企业(2015年14期)2015-04-29
