
基于图像处理的草莓匍匐茎定位技术研究
2018-09-10 02:18周伟崔明
粮食科技与经济 2018年9期
周伟 崔明


[摘要]草莓匍匐茎定位技术是草莓匍匐茎扦插繁苗机器人顺利完成扦插任务的关键。本文对草莓匍匐茎的定位技术进行研究,首先提取匍匐茎图像在HSV颜色空间模型下的H分量图像,并利用图像分割技术获得匍匐茎区域图像;然后对匍匐茎区域图像进行形态学处理和连通域特征分析,获得匍匐茎根部区域图像;最后利用基于距离变化的分水岭算法完成草莓匍匐茎目标区域的分割和定位。实验结果表明,所采用的方法对草莓匍匐茎的定位实时性好、定位精度高,能够满足实际生产需求。
[关键词]草莓;匍匐茎;定位;图像处理
当前革莓育苗方式中,草莓匍匐茎繁殖是最主要的繁殖方法[1]。当前针对草莓的扦插移栽技术主要采取人工分拣续苗法和穴盘苗投放法。人工分拣续苗法采用人工方式进行子苗的扦插,具有劳动强度大、作业效率低下和人力成本较高等缺点;穴盘苗投放法是将穴盘苗从高密度穴盘向低密度穴盘或者花盆里自动移栽,作业效率高,但此类移栽设备的本体是固定不能完成穴盘苗移栽至设施种植区域的任务[2]。
随着图像处理技术的快速发展,视觉检测和定位技术开始广泛应用于农业领域,比如病虫害检测、采摘机器人等,大大推动了农业机械化、智能化的进程[3-4]。本文针对草莓匍匐茎扦插技术的机械化、智能化需求,对自然状态下的草莓匍匐茎扦插子苗进行识别与定位,以期提高草莓匍匐茎扦插繁苗智能分拣技术的适用性。
草莓匍匐茎图像及根部特征区域见图1。如图1(a)所示,草莓匍匐茎主要包括根、茎、叶等部分,为了提高匍匐茎定位算法的稳定性,同时考虑到匍匐茎根部为扦插育苗的关键区域,因此选择特征稳定的根部目标区域为研究对象完成匍匐茎定位,如图1(b)所示。
1 硬件系统构成
草莓匍匐茎定位系统主要包括硬件系统和软件算法两部分。硬件系统上,需要针对特定的检测和定位要求选择分辨率合适的相机、镜头和光源,其中光源为自然光条件下,硬件系统结构见图2。
(1)相机和镜头。根据定位精度要求,选择分辨率为的2048×2048像素的工业CCD相机,根据视野和工作距离选择焦距为25mm的computar工业镜头。
(2)工控机。图像处理终端,主要完成图像采集与图像处理,工控机的性能直接决定图像处理的效率,这里选择研华ARK-2150L型高性能无风扇嵌入式工控机。
2 软件算法设计
软件算法是图像处理的核心和关键,直接决定了图像处理的速度和效率,主要包括图像采集和图像处理[5]。图像采集是图像处理的前提,主要任务是获取高质量的图像[6];图像处理主要包括图像预处理、图像分割、ROI区域提取、区域特征分析等步骤,具体的软件算法流程见图3。
2.1 颜色空间变换
HSV模型能够用来捕述图像的色调、饱和度和透明度,是一种常用的颜色空间模型[7]。鉴于自然条件下图像拍摄的亮度存在变化,因此选取HSV空间中与亮度无关的色调和饱和度通道进行分析。HSV颜色空间图像见图4,在HSV模型空间图像中,H空间图像中的匍匐茎区域相对背景区域差异最为明显,同时考虑到单通道图像处理速度更快,所以选择H通道图像进行分析。
2.2 阈值分割
常用的阈值分割方法有全局阈值法和局部阈值法,全局阈值法又分为手阈值法和自动阈值法,鉴于局部阈值法计算量比较大,同时为了提高图像检测的白适应性,这里选择基于最大类间方差法的全局自动阈值法[8]。
设图像的大小为M×N,各灰度级的概率为pi=ni/MN。设阈值为k,将图像二值化为区域C1和C2,他们的均值分别为u1和u2,概率分别为p1(k)和p2(k),则:
其中01(k)u1+P2(k)u2
(2)
目标函数为: g(k)=u=P1(k)(u1-u)2+P2(k)(u2-u)2
(3)
最大类间方差法选择满足g(k)最大时的k值作为分割阈值,分割效果如图5所示,可以看出基于最大方差的阈值分割法可以有效地提取目标,便于后续的进一步处理。
2.3 形态学处理
图5显示阈值分割后的图像存在噪声干扰,为了顺利完成后续的测量与分析,需要去除图像中的噪声区域。对于二值图像,常用的去噪方法有形态学中的膨胀、腐蚀、开和闭方法[9]。膨胀操作能够使图像的物理边界扩大;腐蚀操作与膨胀作用相反正,其会消融图像的边界;开运算和闭运算是膨胀和腐蚀的结合,其中开运算是先腐蚀后膨胀,可以使图像的轮廓更加光滑,并能够消除小于结构元素的干扰;闭运算与开运算正好相反,其对图像先膨胀后腐蚀,具有弥合狭窄间断和填充孔洞的作用[10]。
形態学处理结果见图6。根据上述分析,为了祛除图像中的噪声干扰区域,首先对图像进行形态学开运算,结果如图6(a)所示;鉴于一般情况选定白色区域作为前景,因此对图像进行取反操作结果如图6(b)所示;为了提取根部区域,对图像进行开运算,祛除了茎部区域,为了便于后续的区域特征分析,对各区域进行孔洞填充处理,结果如图6(c)所示。
2.4 区域特征分析与提取
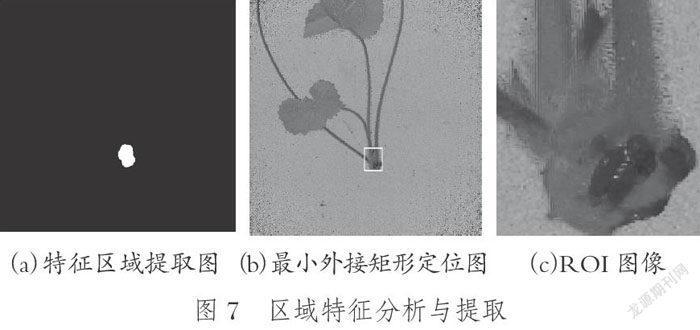
由图6(c)可以看出,经过二值化和ROI提取后的图像包含了目标区域和噪声区域,其中根部区域为日标区域,其他区域为噪声区域。将灰度值一致,且满足8邻接的像素判定为相同区域,即X={Zi}Mi-1,其中Zi表示第i个连通区域。为了提取目标区域,对连通区域的特征进行分析,常用的连通域特征包括面积、圆度、紧密度、凸状性、轮廓边界、轮廓矩等[11]。通过对连通区域的特征进行分析,同时考虑到图像处理速度,这里采用面积特征实现根部目标区域的提取。
区域特征分析与提取结果见图7。根据公式(4)提取出像素面积在(SMin,SMax)的目标特征区域X1,提取出的连通区域如图7(a)所示。鉴于目标区域集中在提取出的根部区域,为了提高图像处理的速度,这里将目标区域的最小外接矩形区域设置为感兴趣区域(ROI),区域最小外接矩形如图7(b)所示,ROI图像如图7(c)所示。
2.5 目标区域定位
为了进一步提取根部目标特征区域,图像处理的关键问题是完成特征区域的分割,本文提出了一种基于距离变换的分水岭算法。
首先对图像进行阈值分割,阈值分割及特征区域提取结果见图8。为了提高图像分割的白适应性,采用最大类间方差阈值分割法,图像分割结果如图8(a)所示。可以看出,经过阈值分割后的图像区域包含很多噪声干扰区域,其中目标区域的面积最大,因此对连通区域面积特征进行分析,提取面积最大的区域作为目标区域,区域提取结果如图8(b)所示。可以看出,根部特征区域包含一些连通的小块区域,且不同区域块的深度信息不同,为了提高图像定位的准确度和精度,优先提取面积最大的特征区域完成匍匐茎定位。图像处理的关键问题转化为如何祛除区域之间的联通区域,进而提取面积最大的特征区域。
距离变换是通过计算目标像素和背景像素的距离关系将二值图像转化为灰度图像,对提取的ROI区域图像进行距离变换,可以计算出目标点与背景区域的距离信息[12]。这里定义二值图像I的连通区域为S,目标区域为O,背景区域为B,其距离变换D的计算公式如式(5)所示。
D(p)二Min(disf(p,q)) p∈O,q∈B
(5)
经过距离变换后的图像灰度值范围较小,根据公式(7),对图像f(x,y)做灰度拉伸处理,图像处理结果见图9。
G(x,y)=255×|f(x,y)-Min|/|Max-Min|
(7)
通过距离变换,原本相互连通的特征区域之间出现了更为明显的隔离,为了进一步分离相连通的特征区域块,本文采用了一种基于阈值标记的分水岭分割方法,结果见图10。其中图像分割结果如图10(a)所示。通过图像分割,原本相互连通的区域被分开,为了提取面积最大的连通区域,这里对连通区域的面积特征进行分析,提取面积最大的连通区域,结果如图10(c)所示。
3 结果与分析
3.1 实验结果
本课题巾对草莓匍匐茎的定位检测要求:定位误差为±0.5mm。为了验证算法的实现效果,实验运行环境CPL为Inler Core i7-3517UE CPU2.20GHz,内存为8GB,操作系统为Windows7,采用VS 2010平台完成了算法的实现,系统软件运行见图11。
计算系统从采集到处理一帧图像的时间不到0.2s,以看出系统定位的实时性较好。为了验证系统的稳定性,这里在不同光照环境下重复检测定位同一草莓匍匐茎,计算每次检测的特征区域中心位置,得到的结果见表1。
其中估计误差是根据目标区域中心位置像素与平均像素的欧式几何距离汁算得到,考虑相机标定,根据相机CCD尺寸、拍摄距离和镜头焦距等参数可以汁算出当前相机的空间分辨率为0.073mm/pix,可以看出不同光照环境下的重复定位误差完全能够达到检测要求。
3.2 误差分析
(1)阈值分割误差。在不同光照环境下,目标区域定位过程中通过最大类间方差法计算得到的阈值也会不同,因此不同光照环境下的阈值分割可能会存在微小的偏差。
(2)分水岭阈值误差。本文采用的分水岭分割方法需要设定合适的分水岭阈值,分水岭阈值的高低影响了分割区域的变化。
4 结论
本文基于图像处理技术对草莓匍匐茎定位技术进行分析,提取H空间模型图像进行分析,通过图像分割、形态学处理和区域特征分析方法提取匍匐茎根部区域,利用基于距离变换的分水岭方法完成草莓匍匐茎目标区域的检测和定位,通过对算法的验证性分析,表明该算法能够实时、准确的完成草莓匍匐茎的定位,能够满足草莓匍匐茎的在线检测定位需求。
参考文献
[1]本刊编辑.草莓繁苗田的管理措施[J].北方园艺,2017 (9):52.
[2]杨涛,张云伟,苟爽.基于机器视觉的草莓自动分级方法研究[J].食品与机械,2018 (3):146-150.
[3]马瑛,杨旭.草莓采摘机器入成熟果实识别及避障控制系统研究——基于ARM与FPGA[J].农机化研究,2017 (2):181-185.
[4]张凯良,杨丽,王粮局,等.高架草莓采摘机器人设计与试验[J].农业机械学报,2012 (9):165-172.
[5]胡波.利用机器视觉防治草莓苗期杂草的研究[J].微计算机信息,2007 (29):197-198.
[6]张凯良,杨丽,张铁中.草莓采摘位置机器視觉与激光辅助定位方法[J].农业机械学报,2010 (4):151-156.
[7]杨春德,郭帅.改进基于HSV空间的阴影检测算法[J].计算机工程与设计,2018 (1):255-259.
[8]李扬,杨长辉,胡友呈,等,基于凸壳及距离变换的重叠柑橘目标识别与定位方法[J].现代制造工程,2018 (9):82-87.
[9]赵梦超,孔令成,谭治英基于改进Otsu法的镀膜金属带缺陷分割[J].计算机工程与设计,2018 (9):2811-2816.
[10]李良,杨洁明.基于HSV空间与形态学的石油套管计数方法[J].现代电子技术,2018 (15):79-82.
[11]李克斌,余厚云,周申江.基于形态学特征的机械零件表面划痕检测[J].光学学报,2018 (8):260-266.
[12]徐少平,刘小平,李春泉,等,基于区域特征分析的快速FCM图像分割改进算法[J].模式识别与人工智能,2012 (6):987-995.
猜你喜欢
农业工程学报(2022年7期)2022-07-09
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
杂文选刊(2018年1期)2018-01-09
阅读与作文(小学高年级版)(2017年10期)2017-10-11
中学生数理化·高一版(2017年1期)2017-04-25
雕塑(1996年3期)1996-07-12
