
单基站CORS-RTK在矿山沉降观测中的应用
2018-09-06 09:58徐蒋林黄晖赵勇刘可胜余学祥
全球定位系统 2018年3期
徐蒋林,黄晖,赵勇,刘可胜,余学祥
(1.安徽理工大学 测绘学院,安徽 淮南 232001; 2.淮南矿业(集团)有限责任公司,安徽 准南 232001; 3.华东有色测绘院,江苏 南京 210000)
0 前 言
全球导航卫星系统的快速发展,促进了CORS系统的快速发展。CORS系统具有多基站、全天候连续运行以及能够扩大基准站工作范围等特点,因此得到推广并广泛应用。单基站CORS系统和多基站CORS系统均属于CORS系统,网络RTK已逐渐成为实时动态定位发展的主流[1]。但受经济、环境等方面的制约,多基站CORS系统的建造比较困难,因此单基站CORS系统在一些小城市的应用比较多[2]。单基站CORS系统相对多基站CORS系统的建设费用低,数据采集速度快,并且管理和维护也很方便[3-5]。根据《煤炭测量规程》要求,对于首采面和重要的建筑物必须得布设地表移动观测站,便于数据分析来掌握地表移动变形的规律[6]。对于地表移动变形的数据采集比较频繁,而且监测站比较多。考虑到时间和成本的因素[7],文中在淮南某矿建立了单基站CORS系统,进行监测点平面信息的采集以及点位的放样。
1 单基站CORS系统与原理
1.1 CORS系统原理介绍
CORS系统由5个部分构成,分别是基准站、用户、数据处理中心、传输系统和播发系统。对于单基站CORS系统来说,单个基站既要进行数据处理,又要接收卫星信号和发射差分信号。通过基站的服务器可以查看所接收卫星的状态、数据发送情况、存储和差分数据。多基站CORS系统则是将多个基站结合起来,每个基站把接收的卫星信号发送到数据中心,再由数据处理中心软件自动计算流动站和基站的距离,选择最优CORS基站作为参考站进行流动站的差分[8]。单基站CORS系统与多基站CORS系统比较如表1所示。

表1 单基站CORS与多基站CORS比较
1.2 单基站CORS系统组成及工作方式
单基站CORS系统由GPS参考站(基准站)、数据处理中心、通信模块和流动站四个部分组成。基准站又包括GPS接收机、天线、避雷针、电源;数据中心进行系统控制和数据处理,通信采用GPRS/CDMA数据传输终端模块。流动站则是通过无线通讯网络向数据中心发送服务请求,并将流动站的概略位置回传给数据中心。
单基站CORS系统工作方式只需要基准站、流动站接收机以及用于传输数据的网线。基准站通过接收载波信号将其观测值和测站信息一起传送到数据控制中心,流动站在接收载波信号的同时自身也采集GPS数据,流动站通过接收的载波信号在系统内部形成差分观测值然后进行实时处理,进一步得到厘米级的定位结果[9]。单基站CORS系统工作方式如图1所示。
1.3 单基站CORS选址
基准站的选址需要考虑流动站固定解的解算与基准站的公共卫星数的关系,视野必须开阔,在高度角15°以上的可视范围内没有障碍物;要求不能有强磁场;远离大面积水域,以防信号受到干扰;还要选择交通便利且易于保存的地方。根据实际情况在矿区的办公楼楼顶建立单基站CORS系统的基准站,建成永久性观测墩,如图2所示。
2 单基站CORS-RTK在矿山测量的应用
2.1 应用背景
在淮南某矿区工作面有走向观测线、倾向观测线,同时布设控制点和监测点。由于地下煤矿开采会导致开采工作面上方村庄的下沉,故对其上方村庄同样布设了6个控制点和23个监测点。为了及时准确地掌握煤矿的开采对村庄的影响并研究地表移动变形规律以保护村民的安全,采用传统全站仪和常规RTK测量已经很难在规定时间内完成点位布设任务和获取地表沉降变化的规律,故需要在单基站CORS系统下进行RTK点位放样和采集信息,并结合Lecia水准仪进行三等水准测量。
2.2 数据采集与处理
根据已知的控制点和矿区的实际建立单基站CORS控制网,如图3所示。采用北京54坐标系作为平面坐标系统,采用1985国家高程基准作为高程系统。按D级GPS网的要求,控制网中有四个C级GPS点,以单基站CORS为基准站。使用5台中海达三系统接收机,要求静态观测时间不能少于一个小时且连续有效。应用GPS定位所得坐标都是在WGS-84大地坐标系下的,而我国通常采用北京54坐标系或西安80坐标系这两种参心坐标系。通过中海达HGO静态数据处理软件进行数据处理,平差后得到站点当地坐标。将矿区已有的控制点作为已知数据,所建的单基站作为基准站加上几个内插检核点,进行误差分析,平差后站点中误差如表2所示。

站点名中误差N/mm中误差E/mm中误差U/mm ML1911.12 ML250.70.81.4 ML310.912 ML3311.12.3 ML360.70.81.4 ML412.32.64.5 ML451.11.12.2 ML5811.12 ML600.91.11.9 ML620.91.11.9
对静态数据解算得到基线的点位精度均在4 mm及以下,相对误差在0.3 ppm以下。平差后的站点中误差也均在5 mm以下。通过网平差可得,基线最弱边平差为1.61 mm,相对误差为1/35 262,平面最弱点ML33中误差为2.05 mm.χ2=62.2检验通过。《GPS测量规范》要求D级GPS网中误差不小于20 mm,由表2可以看出平差后站点中误差均符合要求。控制网满足设计要求。
控制网符合要求后进行CORS-RTK的精度检核,对矿区10个静态观测的GPS点进行CORS-RTK测量。测量数据经过手簿求取,然后将手簿中10个点坐标导入EXCEL表格,对CORS-RTK测量的坐标与静态解算坐标进行比较。选取的10个静态解算点坐标、CORS-RTK测量点坐标以及坐标差值如表3所示。

表3 静态解算点坐标与CORS-RTK测量点坐标对比
由表3可以看出,静态解算的坐标与CORS-RTK所测量的坐标差值都在13 mm以下,精度满足矿山测量的要求。
同时对CORS-RTK测量点的中误差进行统计,分析结果如表4所示。

表4 单基站CORS-RTK测量点精度检核表
由表4可见,各检测点在X方向中误差最大的为15 mm,最小的为5 mm,平均中误差为9.3 mm;Y方向中误差最大为11 mm,最小为6 mm,平均中误差为7.9 mm;高程误差最大的为30 mm,最小为16 mm,平均中误差为22.5 mm.平面测量精度比较高。
为了获取沉降变形规律,在单基站CORS系统下使用CORS-RTK进行点位的放样并对每个监测点进行数次测量,从测量监测点中选取两个点,平面点相差在2 mm以内求取平均值作为最终测量结果。在采集过程中必须在固定解下测量,并确保PDOP<6.从RTK中导出所测的169个观测点的数据,将测量点的X中误差和Y中误差数据统计分析,为了绘图方便按观测点号顺序编号,中误差数据分布如图4所示。通过计算后的点位中误差如表5所示。
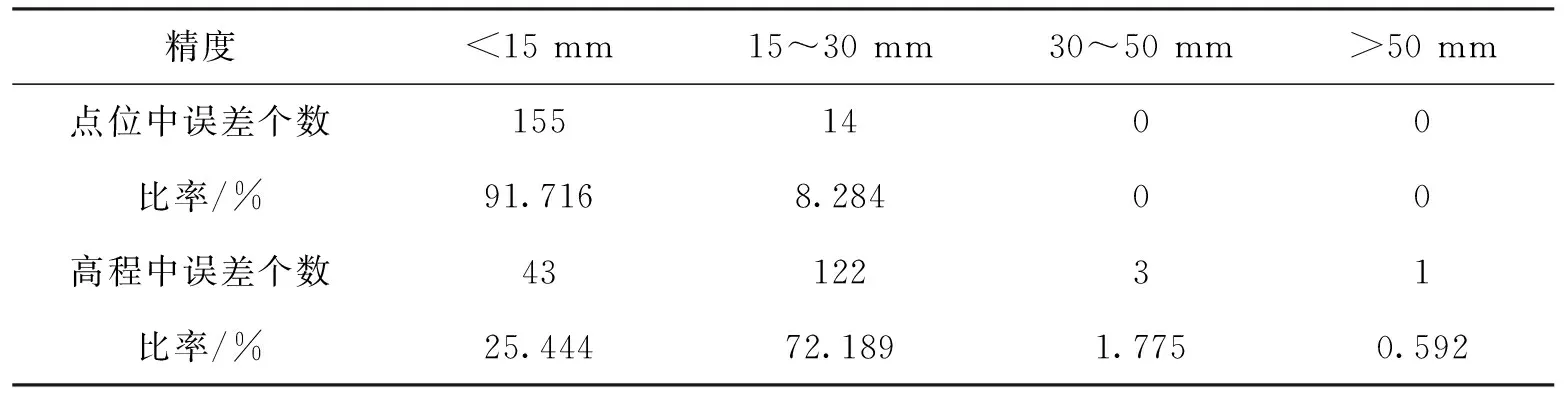
精度<15 mm15~30 mm30~50 mm>50 mm 点位中误差个数1551400 比率/%91.7168.28400 高程中误差个数4312231 比率/%25.44472.1891.7750.592
2.3 精度分析
从图4可以看出,通过RTK测量所得的169个点X中误差在5~22 mm之内,Y中误差在4~22 mm之内且在10 mm左右比较集中稳定。从表5可以看出点位中误差小于15 mm的占91.716%,在15~30 mm占8.284%.国家最新版 《工程测量规范》要求点位中误差小于70 mm,故X方向中误差和Y方向中误差均在允许范围内。规范要求高程中误差要低于30 mm,由表5看出有四个点的高程中误差大于30 mm,故不满足要求。因此在矿山沉降观测时需要通过CORS-RTK点位放样再结合电子水准仪进行矿山高程测量。
3 结束语
单基站CORS系统在矿区的沉降观测中有着重大意义。不仅减轻了外业测量的劳动量,而且提高了工作效率。建立单基站CORS系统作业范围相比于常规的RTK测量范围更大,覆盖面积能达到600~700 km2而且更精准,同时也减少了不少工作时间。本文的实例分析说明单基站CORS系统能够提供较高的矿山测量精度,CORS-RTK测量中误差能够达到测量规范要求,平面精度能够符合等级测量规范,因此单基站CORS系统能够逐步替代传统测量方法。由于单基站CORS系统通讯方式上为GPRS、CDMA方式,信号的强弱会对测量精度有影响。对于在高程方向的测量精度还不能达到要求,在矿山沉降观测过程中还需进一步研究。
猜你喜欢
航空学报(2022年5期)2022-07-04
航天制造技术(2020年4期)2020-09-11
科学导报·科学工程与电力(2019年5期)2019-10-20
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
科技传播(2018年6期)2018-04-17
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
海峡科技与产业(2017年3期)2017-04-13
