
基于无人机三维重建现状模型的风景园林设计研究与教学探索
2018-09-05 11:37:24刘通黎展荣
风景园林 2018年6期
刘通 黎展荣
数字和信息的时代已经来临,在建筑学与城乡规划学的相关领域,数字技术的运用已深入到学科行业的各个环节,技术应用层面不断拓展[1]。随着无人机数字技术的发展,无人机在风景园林学相关领域中的应用也不断深入。在风景园林规划设计工作中,无人机逐渐成为必不可少的硬件设备。在规划设计的前期分析工作中,可以用无人机对场地现状进行航拍,帮助设计师综合分析场地现状。在工程建设过程中,可以用无人机进行定期、定点航拍,记录施工过程,发现施工问题,为设计修改提供基础资料。在工程建设完成后,可以用无人机进行园区监控,为园区的管理维护工作提供便利。在风景园林设计教学工作中,将传统教学内容与前沿科学技术相结合,对提高学生能力、训练学生思维和开阔学生视野有重要的作用和积极的意义。本文以第十二届中国(南宁)国际园林博览会矿坑花园为规划设计案例,以北京林业大学园林学院2013、2014级毕业设计为教学案例,以无人机三维重建现状模型为结合点,研究并展示无人机技术在风景园林设计工作中的应用价值,探究风景园林设计教学内容与前沿科学技术的融合[2]。
1 无人机三维重建模型
1.1 相关概念
无人机(Unmanned Aerial Vehicle,简称UAV),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机可分为:固定翼无人机、多旋翼无人机、无人直升机和无人飞艇等。它具有体积小、造价低、使用方便及对场地要求较低等优点[3]。
无人机航空摄影,是以无人机作为空中平台,以机载遥感设备,如高分辨率CCD数码相机、轻型光学相机、红外扫描仪等获取信息。无人机航摄作业往往是低空飞行的,具有数码彩色航摄相机及GPS定位数据等,能够实现高分辨率影像的采集。
无人机三维重建模型,是利用无人机航拍采集建模目标数字影像,应用多种数据处理手段和计算机技术,通过专业数据处理软件,在计算机中建立三维模型,数据处理可按实际需要,处理出数字高程模型(Digital Elevation Model,简称DEM)、数字表面模型(Digital Surface Model,简称DSM)、数字正射影像(Digital Orthophoto Map,简称DOM)这几种结果。
DEM即地形表面形态的数字化表达,它是用一组有序数值阵列形式表示地面高程的一种实体地面模型。DSM是包含了地表建筑物、桥梁和树木等高度的地面高程模型。DEM只包含了地形的高程信息。DSM是在DEM的基础上,进一步涵盖了除地表以外的其他地表信息的高程,真实地表达地面起伏情况。图1-1包括了植被和建筑等信息,图1-2去掉了植被和建筑等信息[4]。
DOM是对航空(或航天)像片进行数字微分纠正和镶嵌,按一定图幅范围裁剪生成的数字正射影像集,它同时具备地图几何精度和影像特征(图2)。
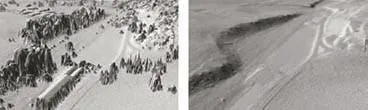
1 DSM与DEM比较Comparison of DSM and DEM1-1 DSM包括植被和建筑等信息DSM includes the information of plant and architecture, etc1-2 DEM不包括植被和建筑等信息DEM does not include the information of plant and architecture, etc

2 DOM范例Example of DOM
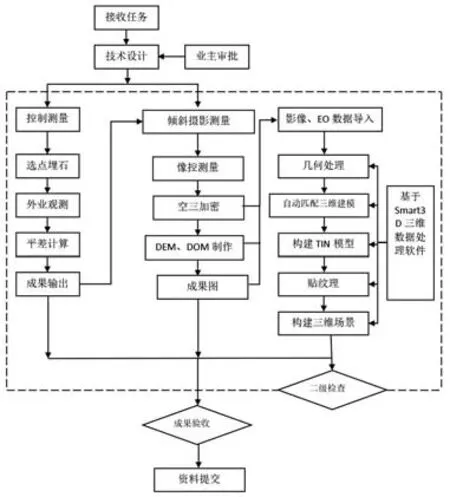
3 技术流程Technical process

4 Smart3D Capture工作流程示意图Workflow of Smart3D Capture
1.2 技术流程
无人机航拍影像数据需要专业数据处理软件进行处理,涉及技术较为广泛且复杂,主要有空中三角测量软件和倾斜摄影测量软件两种类型。下面以Smart3D Capture为例,说明技术流程(图3)。流程利用无人机倾斜摄影测量系统获取的高分辨率的地物多视角多方位影像数据,运用Smart3D Capture基于数字影像密集匹配技术的快速三维场景运算功能,进行倾斜摄影空中三角测量解算、地面景物的逼真实景三维重构,最终实现全要素的三维数字模型及场景生产。
1)首先收集整理测区的范围和已有控制点资料,向相关部门申请航飞批文,按规程要求与相关部门协调。
2)地面控制测量组开始进场踏勘,查找控制起算点并进行控制网埋石和观测。航飞得到许可后,安排飞机和航摄仪设备进场并安装调试。起飞进行航飞数据采集和倾斜摄影。各项指标严格按照航飞设计指标进行,如果出现漏飞、数据质量差等问题,立即进行补飞或重飞,如果原航线满足补飞要求,可按原航线补飞,也可以按新航线补飞[5]。
3)利用后处理POS数据、地面控制点数据、影像数据(包括垂直影像和倾斜影像)进行空中三角测量,得到每张航片的精确外方位元素。
4)利用垂直影像、倾斜影像数据结合空中三角测量加密成果,运用影像密集匹配技术,生产出基于真实影像超高密度点云数据。对于这种海量数据需要对其进行切块分割,按照设置的优先等级对分割的区块内的密集点云构建不规则三角网TIN,并生成带白膜的三维模型。对三维模型自动赋予纹理,由于所有影像均具有精确定位信息,该过程可自动快速将影像贴在对应位置的三维模型表面,最后输出模型纹理清晰逼真的三维瓦片。
5)利用模型编辑软件对模型进行补漏、修改等精细化处理后,再导回到模型结构中,生产出全要素的三维数字模型及场景[6]。
1.2.1 三维模型自动生成
在航拍及像控点测量完成后,利用Smart3D Capture进行三维模型的自动生成,其工作流程示意图如图4所示:
1)影像导入,导入相机检校文件与每张像片的外方位元素,创建摄区空三工程文件。根据外方位元素得到摄区像主点位置。将摄区外业像控点量测到空三工程中,根据刺点点位信息将控制点量入软件模块。
2)空中三角测量计算,将所有倾斜摄区影像、像控点全部参与空三计算。每张像片(包含倾斜影像)的外方位元素使用POS数据处理结果进行计算。
3)Smart3D Capture软件AT模块经过提取特征点(Extracting Keypoints)、提取同名像对(Selecting Pairs)等步骤的运算处理,得到摄区空中三角测量成果。为提高空中三角测量成果的精度,可以使用软件对摄区进行二次空三运算,最终得到更精确的摄区空三结果报告。
4)空三加密成果输出,空三成果以加密分区进行整理,成果内容包括:相机文件,像片控制点坐标,连接点或测图定向点像片坐标和大地坐标,每张像片的内、外方位元素,连接点分布图,保密检查点大地坐标等。
5)输出三维模型,可以得到贴图信息的三维模型,可以导出为通用的三维模型数据。
1.2.2 三维模型修复
根据航摄获取的影像数据制作三维模型成果,可以真实还原地物的空间位置、形态、颜色和纹理。但自动三维模型生成,难以避免地会出现以下错误:
1)一些错误的模型,会飘在正常三维模型上方。
2)模型空洞,主要出现在水域,这些区域,软件一般无法进行特征点生成和匹配。
3)严重的房屋变形和扭曲。
对于这些错误,需要将模型数据导入到三维模型编辑软件中进行修改,包括调整三维网格数据,重新进行局部贴图等。
2 无人机三维重建模型的优势
传统的地形图,以平面的方式,用高程点和等高线表示竖向高差变化情况,用各种图例符号表示地表情况。在精度要求不高的总体规划环节,平面地形图基本能满足设计师的要求。但在精度要求较高的工程方案设计环节和精度要求更高的施工图设计环节,平面地形图精确度、直观性和完整性不足的缺点便越发明显。尤其在现场地形复杂的项目中,这些缺点更加突出。要求测绘单位进行更高精度的测绘,不仅意味着时间的损耗和项目成本的增加,最关键的是,得到的更高精度地形图也不一定能解决问题。例如在第十二届中国(南宁)国际园林博览会矿坑花园项目中,矿坑的现状情况非常复杂:山丘、崖壁和凹坑的高差变化剧烈,崖壁结构含泥量高、土石结构松散不稳定,时有坍塌,现状处于不断变化的过程中。图5为矿坑花园平面地形图局部,图中东侧山丘最高点标高105.42m,坑底最低点标高52.41m,高差53.01m(设计为峻崖潭)。西侧山丘最高点标高96.96m,坑底最低点标高71.29m,高差25.67m(设计为飞瀑湖)。南侧无山体,地面标高71m左右,坑底最低点标高48.36m,高差22.64m(设计为台地园)。平面地形图在表达该地块现状时的劣势显露无疑,精确度、直观性和完整性都达不到要求,大量现状场地的细节内容无法表达充分。这主要是由于平面图例符号表达能力较弱,以及很多区域人工测量难以达到。若只以此图为基础进行深入设计将存在较大误差,设计反复调整和修改将额外增加相当大的工作量,分散了设计师在设计核心问题上的时间和精力。
相较于传统的地形图,无人机三维重建模型具有显著优势:准确、直观和详实。以点云数据的方式生成模型,模型上每个点的位置和高程都具有良好的精度。三维模型的表面附有基于航拍照片生成的贴图,还原度较高,效果逼真直观;现状场地的丰富细节被最大程度地保留并呈现,细节损耗较少,内容完整度较高;浏览模型时可以旋转和缩放,方便各个角度观察和研究模型细节。无人机能适应各种复杂的地形,对人工难以到达的区域进行测量工作,将丰富的场地细节呈现出来,图6是图5相同区域的无人机三维重建现状模型,可以看到该模型不仅准确地反映了现状山丘、崖壁和凹坑的地形高差情况,更以模型贴图的形式清晰直观、逼真详实地反映了场地内泥土、石块、地被、树丛、水体、建筑等细节情况。这为设计师进行低误差、高精度的精细设计提供了良好的基础。
3 基于无人机三维重建现状模型的风景园林设计研究
3.1 现状分析阶段
在矿坑花园项目中,设计师基于该现状三维模型,结合现场踏勘的直观判断和拍摄的照片,对场地进行细致入微的现状分析,包括:现状崖壁安全性、现状崖壁观赏性、现状水体、现状植被、现状路径和现状平地等(表1、图7)。
3.2 设计构思阶段

5 矿坑花园的平面地形图(局部)Topographic map of mine garden (part)

6 矿坑花园的无人机三维重建现状模型(局部)UAV 3D reconstruction of current model of mine garden(part)
基于矿坑花园现状高差变化剧烈、土石结构不稳定的总体情况,设计师以保证安全、最大程度结合现状、最小干预和扰动为原则,提出土石清理、崖壁修整、植被修复、安全避让、路径介入、特色创造的设计策略。对采石作业遗留的杂乱现场进行整理,清理表土和碎石,突显岩体结构的完整形态,增强景观视觉效果,废弃石材可用作景观构筑材料。对重要节点周边风貌欠佳的崖壁进行适度调整,通过局部加固、放缓坡度、植被覆盖等方式,增加崖壁结构的稳定性,避免过度使用工程措施,突出崖壁的自然风貌,部分改造为瀑布叠水。釆用人工干预结合自然演替的植被恢复策略,以南宁地区本土植物及适宜在南宁种植的园林植物为基础,营造多样的矿坑植被特色。通过对现状崖壁土石结构和坡度等条件进行分析判断,选取适宜的游览路线和活动场地,避开存在滑坡、落石等隐患的危险区域。结合现状条件适当增设人工构筑设施,不破坏矿坑的原始风貌。平台、栈道、廊架等通过恰当的介入,与场地环境相融合,提供丰富、安全、惊险、刺激的游览体验,创造强烈的吸引力。延续场地的采石记忆,强调矿坑生态文明,设置契合园博会主题的科普教育内容,提取本土文化要素融入景观环境设计,创造独具特色的矿坑生态文化(图8)。
3.3 设计推敲阶段
结合现状分析和设计策略,设计师在具体推敲设计时,将设计内容模型叠加在现状三维模型上,设计的平台、栈道、廊架、建筑、水体、植物与现状崖壁、水体、植被、路径、平地情况仔细对应,具体包括:平台、栈道、廊架和建筑的位置、形状、大小、高度、视线方向、观赏界面、观赏点位、观赏角度、围合方式、材料和结构;水体的水位控制、补水点位置、抽水点位置、水泵位置、瀑布位置、面积、体积及观赏界面;植物的种类、种植区域、植物群落组合、林冠线、视线豁口、色彩和季向变化等(图9、10)。
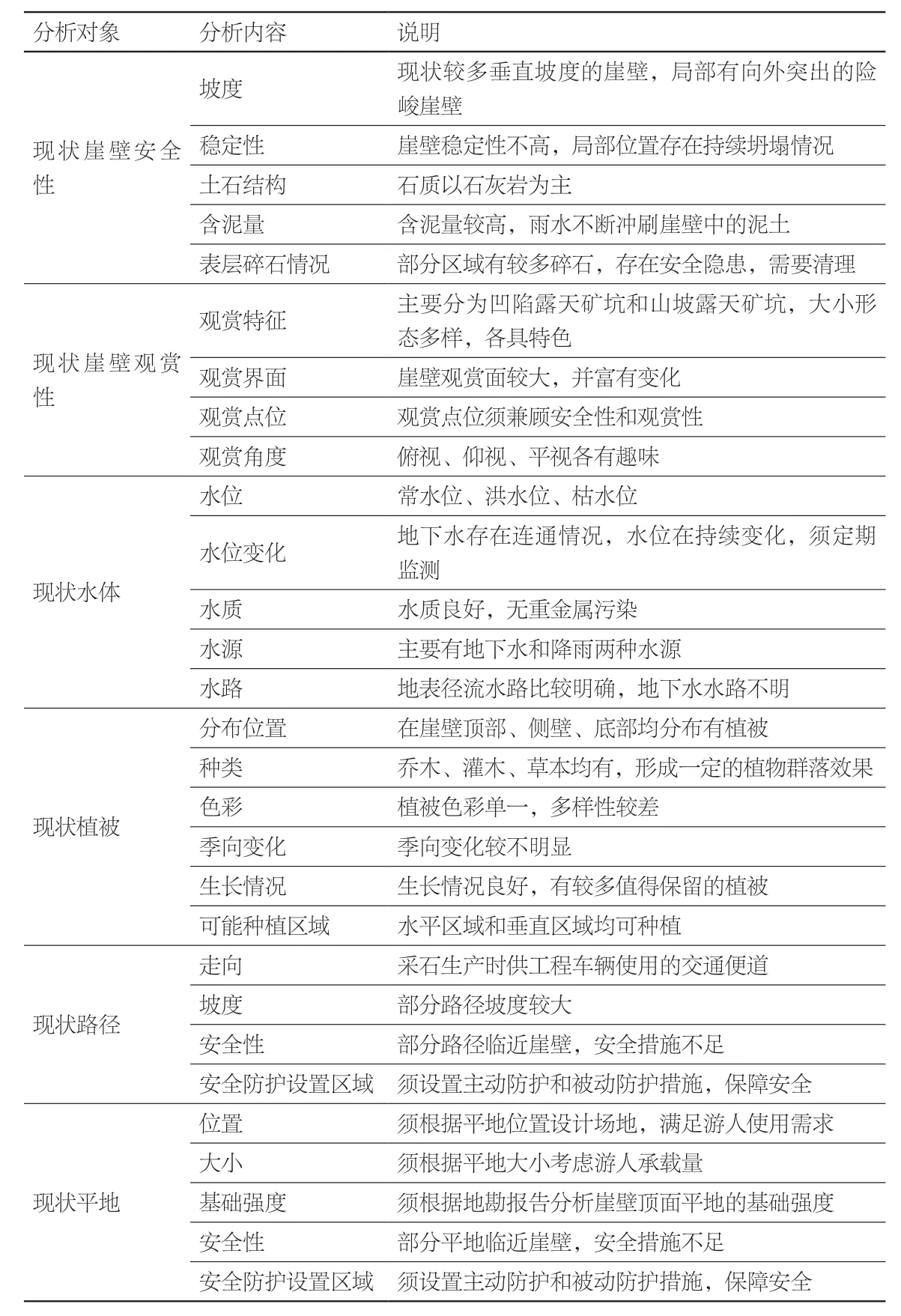
表1 矿坑花园现状分析表Tab. 1 Present situation analysis of mine garden

7 峻崖潭现状分析Present situation analysis of Cliff Lake
受交通距离和交通条件的制约,设计师现场踏勘的次数有限;受时间和体力的限制,设计师现场踏勘时很难做到无死角和全覆盖。在矿坑花园项目中,复杂的现状更是充满了危险,大多数区域都只能远看和拍照,无法接近。通过引入准确、直观、详实的无人机三维重建模型技术,为设计师提供了一个可以随时仔细研究的现状全信息模型,弥补了现场踏勘和现状照片的不足,使设计精度和工作效率得到显著提升。通过该项目也具体地展示出无人机三维重建现状模型技术与风景园林设计的结合方式和效果。
需要特别说明的是,在矿坑花园项目中,现状地面的乔木数量不多,对地面遮挡较少,无人机三维重建现状模型应用较好。当现状地面有大量乔木、树林以及树冠之下的地面被较多遮挡时,就需要DEM的辅助,并进行一定程度的人工踏勘,探明被树冠遮挡的地面情况。
4 基于无人机三维重建现状模型的风景园林教学探索
美国著名风景园林设计师、教育家约翰·奥姆斯比·西蒙兹(John Ormsbee Simonds)在其著作《景观设计学—场地规划与设计手册》中提到:“人们在景观规划中最核心的就是体验,通过体验认识场地、确定用途,其次才是有意识地进行空间划分和形式设计,并且空间和形式都是由最终目的所决定的,而最终目的就是要获得绝佳的空间体验。”
可以说,风景园林设计教学中首要任务就是让学生掌握体验的方法,学会通过体验认识现状场地。由于学生经验有限,对场地空间缺乏把控能力,难以很好地体验和感知场地空间的尺度、结构、布局和关系。虽然学生进行了现场踏勘和调研,并拍摄了照片,但在实际设计过程中,仍然无法将设计构思与现状场地空间很好地结合。与二维的现状地形图相比,现状三维模型更加形象;与目前常用的等高线生成的现状三维模型相比,无人机航拍生成现状三维模型,更加准确、直观和详实。通过无人机三维重建现状模型的构建,帮助学生更有效地进行现状场地空间的体验,把握其空间特征,弥补二维现状地形图和等高线生成的现状三维模型在表达场地空间时的不足。
设计师的工作流程是高校风景园林设计教学的参考范式。结合无人机三维重建现状模型的技术特点,以北京林业大学园林学院2013级毕业设计《第十二届中国(南宁)国际园林博览会广西园设计》和2014级毕业设计《第十二届中国(南宁)国际园林博览会矿坑花园设计》为教学经验,本文提出可以将设计教学范式调整为:1)研究CAD现状地形图和其他现状基础资料;2)携带地形图纸质版进行现场踏勘,复核资料,拍摄人视角度现状照片,用无人机航拍现状照片;3)用无人机航拍现状照片生成三维模型,整理CAD现状地形图,绘制现状分析图,开展前期分析工作;4)基于无人机三维重建现状模型和地形图纸质版进行草图设计;5)基于无人机三维重建现状模型进行设计模型推敲,完成精细设计。其中,4、5两个环节包括了概念规划方案、工程设计方案和施工图设计的全部工作内容。通过让学生学习、理解和掌握该工作流程,实现无人机三维重建现状模型技术辅助和促进风景园林设计教学。

8 峻崖潭设计策略Design strategy of Cliff Lake

9 峻崖潭设计模型推敲Polishing the design model of Cliff Lake

10 峻崖潭建设过程Construction process of Cliff Lake
具体到教学内容上,需要给学生增加的讲授和实操内容有:1)无人机技术概述、无人机技术原理介绍和主流无人机产品介绍(1课时);2)主流无人机产品操作实习(外业1课时);3)无人机三维重建现状模型技术流程介绍(1课时);4)无人机三维重建现状模型技术流程操作实习(4课时);5)基于无人机三维重建现状模型和地形图纸质版进行草图设计(与评图课时一致);6)基于无人机三维重建现状模型进行设计模型推敲(与评图课时一致)。
5 总结
综上所述,在风景园林设计与教学中引入无人机三维重建现状模型技术,将设计工作流程、设计教学内容与前沿科学技术相结合,对于风景园林设计与教学的提升有积极作用。
风景园林设计方面包括:
1)提高设计工作精度。风景园林设计注重因地制宜,无人机三维重建现状模型准确、直观和详实,模型点云的空间位置和高程精度高,模型贴图逼真直观,弥补了现场踏勘和现状照片的不足,做到现状情况全信息、无死角和全覆盖。以此模型为基础进行设计深化和模型推敲,设计准确性好、精度高。
2)提升设计工作效率。现状信息和高程数据的准确,一方面减少了设计师现场踏勘的次数,提高了现场踏勘的效率,设计师把重点区域踏勘后,剩下区域交给无人机完成;另一方面极大地降低了设计工作中的误差,减少设计反复调整和修改所产生的额外工作量,提高工作效率,使设计师可以投入更多的时间和精力聚焦在设计核心问题上。
风景园林教学方面包括:
1)提高学生设计能力。风景园林设计教学的首要目标是让学生学会体验和认识现状场地,无人机技术的引入为学生认知场地提供了全新方式,对于学生把握场地空间结构,分析场地现状问题,思考设计解决方案有着积极的促进作用,帮助学生在实际设计过程中将设计内容与现状情况充分结合,达到提高学生设计能力的教学效果。
2)开阔学生综合视野。风景园林是一门综合性很强的学科,与多门学科都有交叉和联系。无人机技术作为测绘学科的关键技术,是测绘学科和风景园林学科的重要交叉点。通过无人机三维重建现状模型技术的学习,开阔学生视野,看到风景园林学科的发展与创新,激发不断探索研究和拓展学习的兴趣。
注释:
① 图1~4由作者自绘或改绘;图5~10为作者根据第十二届中国(南宁)国际园林博览会筹办工作指挥部、北京多义景观规划设计事务所提供的资料绘制。
② 表1为作者自绘。
猜你喜欢
住区(2022年6期)2022-02-15 08:48:02
软件(2020年3期)2020-04-20 00:56:34
现代园艺(2018年2期)2018-03-15 08:00:55
现代园艺(2018年3期)2018-02-10 05:18:31
文学港(2018年1期)2018-01-25 12:31:06
文学港(2018年1期)2018-01-25 12:30:50
现代园艺(2017年13期)2018-01-19 02:28:33
光学精密工程(2016年6期)2016-11-07 09:07:56
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
居业(2015年16期)2016-02-24 19:37:17
