
荔枝园智能灌溉决策系统模糊控制器设计与优化
2018-08-31 09:17谢家兴莫昊凡余国雄王卫星
农业机械学报 2018年8期
谢家兴 高 鹏 莫昊凡 余国雄,3 胡 洁 王卫星,4
(1.华南农业大学电子工程学院, 广州 510642; 2.广东省智慧果园科技创新中心, 广州 510642; 3.中国移动通信集团广东有限公司, 江门 529030; 4.广东省农情信息监测工程技术研究中心, 广州 510642)
0 引言
我国荔枝种植总面积60万hm2,占世界荔枝总面积的75%;荔枝总产量190.66万t,占世界荔枝总产量的47.78%,占世界生产总值的57.75%以上,目前仍呈增大趋势[1-2]。荔枝园主要采用的传统漫灌技术对水资源造成较大浪费[3-7]。同时,荔枝园所处环境复杂,受光照、土壤湿度、空气湿度、降雨等条件影响,由人为主观意识产生的判断有较大不确定性及误差,易造成较大经济以及资源浪费。因此,开发一种荔枝园智能控制系统对荔枝园进行现代化管理,以最大化节约资源,势在必行。
目前,郭正琴等[8]设计了基于模糊控制的智能灌溉控制系统,杨翠翠[9]设计了基于无线网络的环境监测与智能控制灌溉系统,张晓光等[10]设计了节水灌溉的模糊系统,高玉芹[11]设计了基于ZigBee和模糊控制决策的自动灌溉系统。以上系统仅设计了基本模糊控制器,而基本模糊控制器稳态性能低,存在稳态误差等。基于此,本文设计基于模糊控制技术的荔枝园智能灌溉决策系统,对基本模糊控制器进行优化,提升其控制精确度与稳定性,对所接收数据进行更好的决策和控制。
1 智能灌溉模糊控制软件设计
模糊专家决策系统接收传感器节点采集的土壤含水率数据,根据专家系统的模糊规则实时推理出灌溉量,进行灌溉。
对荔枝园灌溉环境分析可得,用于荔枝智能灌溉的模糊专家系统为多维的模糊控制专家系统,根据灌溉过程中的人为经验,将专家的经验、知识库抽象化为模糊控制中的模糊规则,选择不确定性推理的确定性模型作为本专家系统的推理机,该模型简单实用,已被应用到一些实用的专家系统之中[7]。模糊专家决策系统的模糊控制流程图如图1所示。
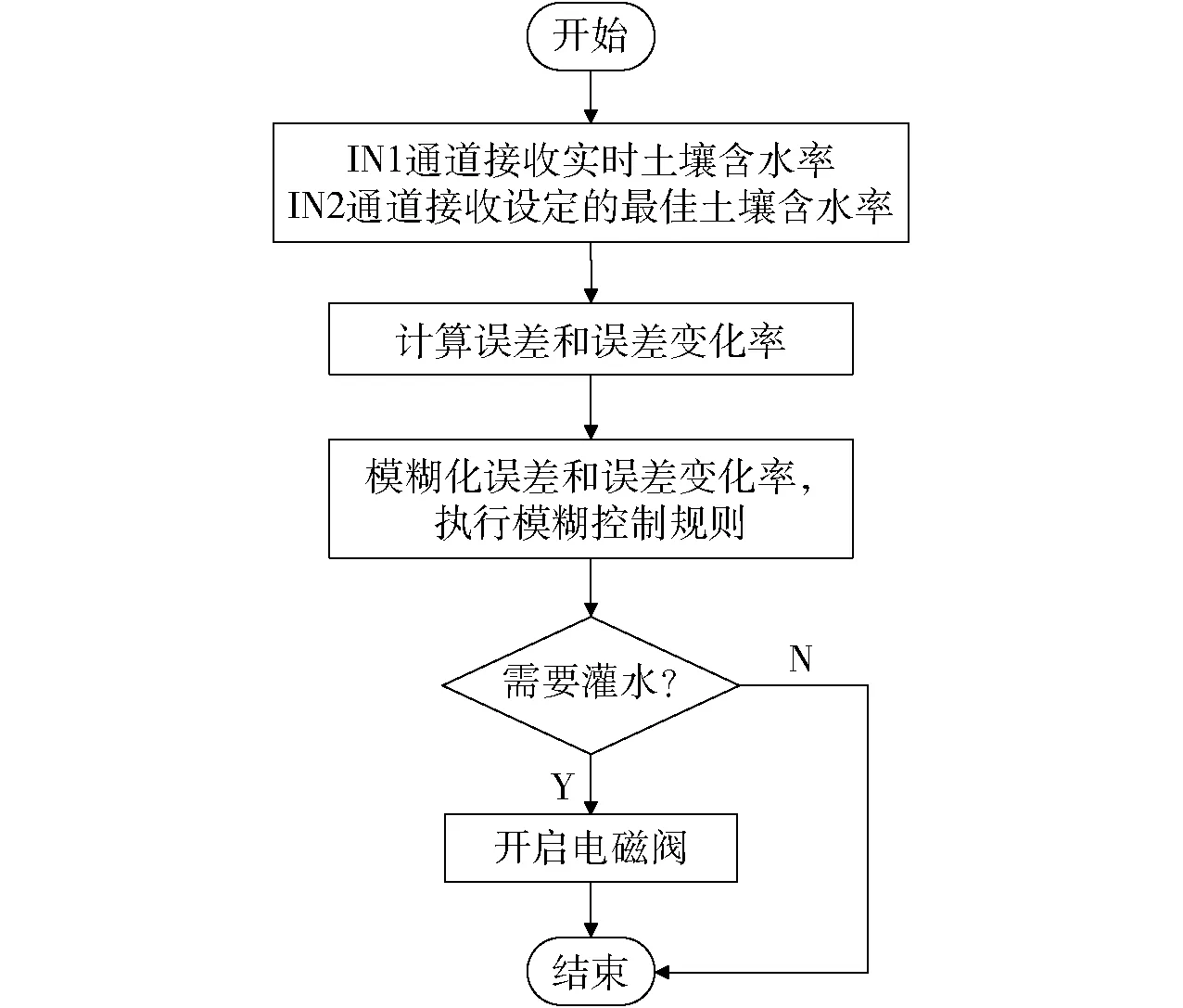
图1 模糊控制流程图 Fig.1 Flow chart of fuzzy control
荔枝园中的环境信息包括温度、空气湿度、光照度和土壤含水率等,影响荔枝生长的关键因素是土壤含水率。在实际灌溉中,通常根据土壤含水率来决定荔枝是否需要灌溉。
荔枝在不同生长周期里所需的土壤最佳含水率均有所不同,所以本系统在确定荔枝的生长周期后,选用该周期土壤最佳含水率与土壤实测含水率的差E,及其误差变化率EC为2个输入变量,土壤需水量U作为其输出量,后将E和EC输入模糊控制器进行模糊化控制,通过模糊决策产生灌溉指令来控制灌溉执行机构,实现灌溉。其中,模块K1、K2、K3起调幅作用,确保系统的稳定性,其总体结构如图2所示。
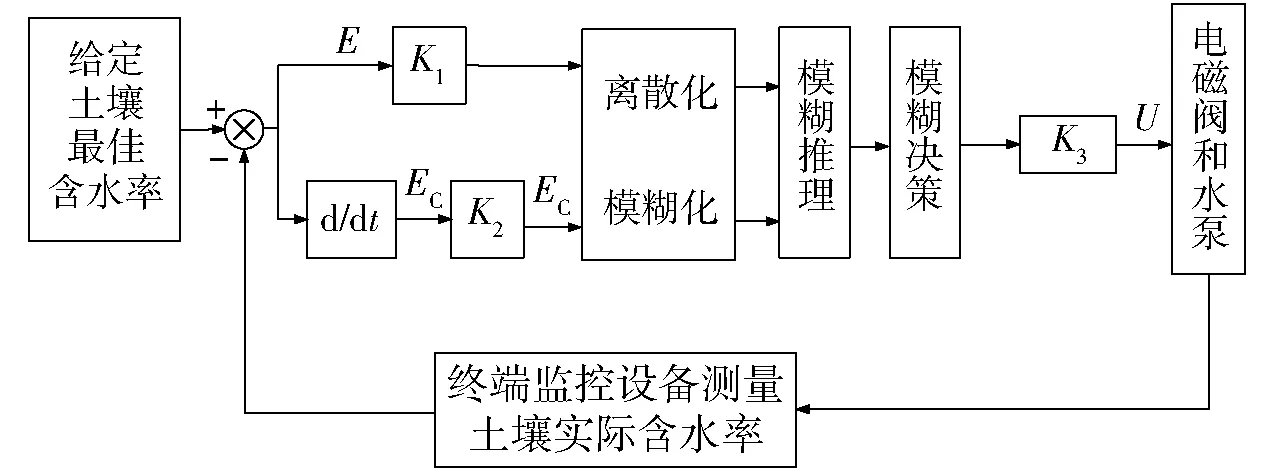
图2 荔枝园智能灌溉系统总体结构图 Fig.2 Overall structure diagram of intelligent irrigation system in litchi orchard
2 智能灌溉模糊控制器设计
2.1 理论基础
模糊控制器是以模糊集合理论和模糊推理为基础,模拟人的思维方式,能总结丰富的操作经验,从而用自然语言表述控制策略或者通过大量实际操作归纳总结出多个控制规则,并用计算机实现自动控制[12-14]。模糊控制是一种非线性控制方法,无需建立精确的数学模型,鲁棒性强,非常适合时变以及滞后系统的控制[15]。
2.2 模糊控制器设计
2.2.1模糊语言变量设计
根据荔枝园灌溉专家经验及周边环境对荔枝灌溉的影响,确定控制量为土壤湿度、降雨量、空气湿度等,由于土壤含水率可以反映土壤中水分的含量,而水分是作物生长不可或缺的因素之一,因而土壤含水率可以作为判断作物缺水与否的最佳条件[16-17]。本文选用给定土壤最佳含水率与土壤实测含水率的差E及其误差变化率EC为两个输入变量。
为了提高控制精度,设置多个语言变量。其中误差E和输出变量U的模糊语言值设定为9个,即{NB(负大),NM(负中),NS(负小),NW(负微),ZO(零),PW(正微),PS(正小),PM(正中),PB(正大)},EC的模糊语言值设定为7个,即{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。E的基本论域为{-15,15},模糊论域D为{-6,-4,-2,0,2,4,6},EC的基本论域为{-10,10},模糊论域X为{-6,-4,-2,0,2,4,6},U的基本论域为{-15,15},模糊论域Y为{-10,-7.5,-5,-2.5,0,2.5,5,7.5,10}。表1是用Matlab软件模糊控制工具箱设计的模糊控制规则表。
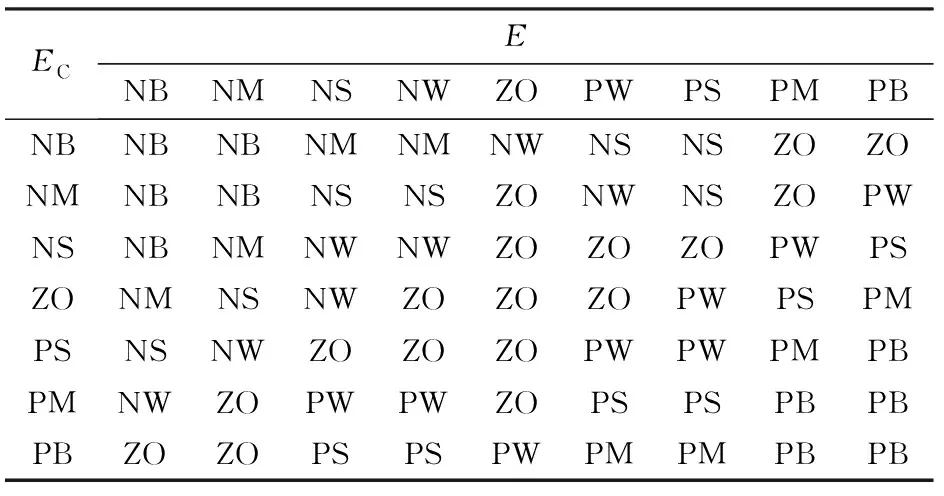
表1 模糊控制规则 Tab.1 Rules of fuzzy control
误差的量化因子Ke、误差变化率的量化因子Kec和控制量的比例因子Ku的计算公式为
(1)
(2)
(3)
式中n1、n2、m——误差E、误差变化率EC、输出变量U的模糊论域最大值
emax、ecmax、umax——误差E、误差变化率EC和输出变量U的基本论域最大值
计算结果为Ke=0.4,Kec=0.6,Ku=1.5。
选择隶属函数时,因三角形隶属函数有简化计算、易于实现的特性,模糊语言变量模糊化的隶属函数类型选择以简单的三角形为主。在误差变量E中还增用了梯形。三角形、梯形隶属函数的解析表达式为
(4)
(5)
其中a、b、c、d均为确定形态的重要参数,且a≤b≤c≤d。
具体隶属函数分布如图3~5所示。
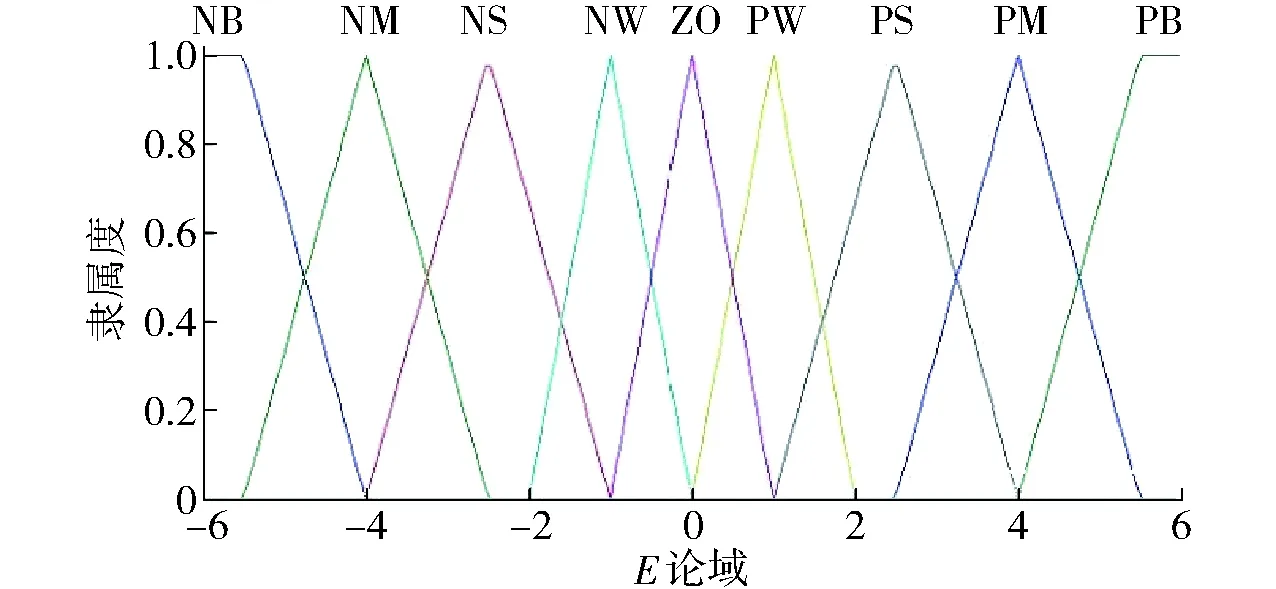
图3 误差变量E的隶属函数 Fig.3 Membership function of fuzzy variables E error
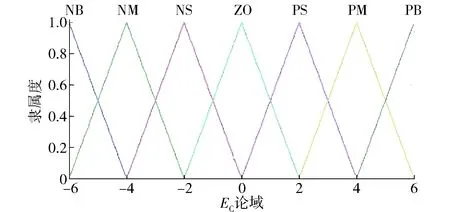
图4 误差变化率EC的隶属函数 Fig.4 Error rate membership function of fuzzy variables EC
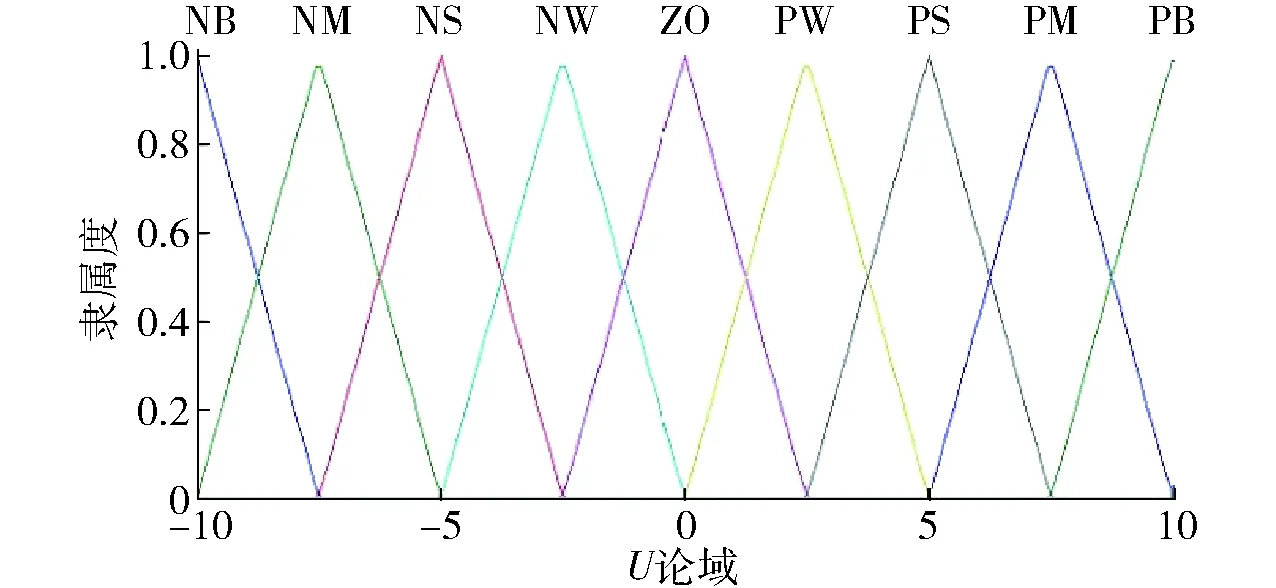
图5 输出变量U的隶属函数 Fig.5 Output membership function of fuzzy variables U
2.2.2模糊规则设计
根据灌溉经验与实测数据,制定出模糊推理规则,规则采用IF-THEN语句,例如,if (EisA) and (ECisB),then(UisC)。其中,A、B、C分别是误差E、误差变化率EC和控制量U论域在X、Y、Z方向上的模糊集。模糊控制表的设计原则为:当误差较大时,控制量的变化应尽量减少误差;当误差较小时,在消除误差外,需要同时考虑系统的稳定性,避免系统产生超调,甚至震荡,确保其稳定性[18]。其详细规则如表1所示。
2.2.3反模糊化
反模糊化是将根据模糊规则决策后的模糊量转换为清晰量的过程,反模糊化的方法有面积重心法、面积平分法、最大隶属度法。其中,面积重心法直观合理,计算数据精确,故本文采用面积重心法进行反模糊化。面积重心法即求出模糊集合隶属函数曲线和横坐标包围区域面积的中心,选该点对应的横坐标Ucen作为该模糊集合的代表值。若论域U={u1,u2,…,un},uj处的隶属度为A(uj),则Ucen的计算公式为
(6)
2.2.4模糊控制器的输出
运用Matlab软件的Simulink工具箱对模糊控制进行仿真。根据建立的模糊库,可以得到如图6所示的模糊规则曲面图。从图6可以看出输入、输出变量的关系,土壤含水率低,所需灌溉量增加,而土壤含水率较高,则所需灌溉量相应减少。
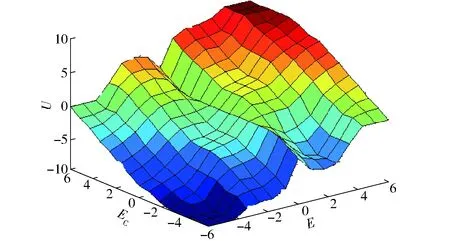
图6 输入、输出变量关系曲面图 Fig.6 Input-output variable relation surface graph
3 仿真与试验
3.1 仿真模型
假定由执行机构和被控对象组成的灌溉系统广义对象的数学模型为典型二阶环节[19],其数学表达式为
(7)
利用Matlab中的Simulink工具箱,构建二维模糊控制系统仿真模型,如图7所示。
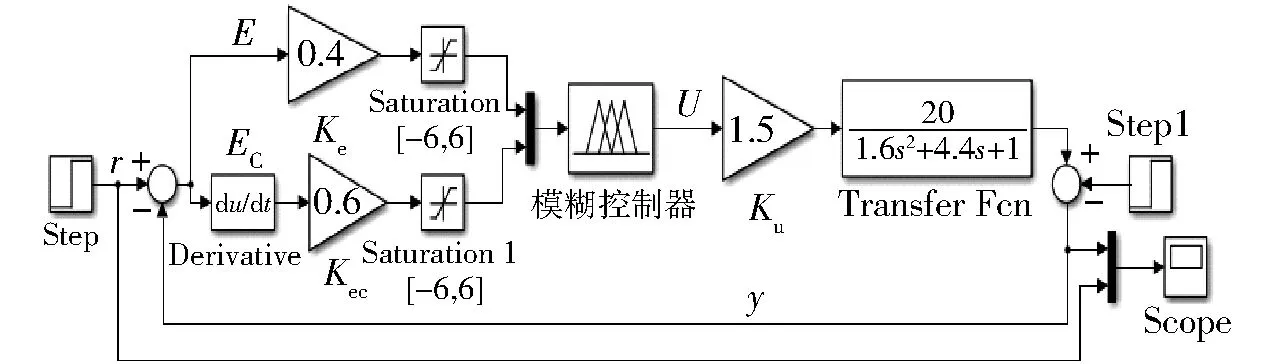
图7 二维模糊控制系统仿真模型 Fig.7 Simulation model of basic fuzzy control system
下面对模糊控制和PID控制的控制性能进行分析比较。对同样的被控系统,建立PID控制,对于该二阶系统,根据多次试验得整定PID控制的参数Kp=0.284,Ki=0.03,Kd=0.626,设置阶跃信号产生时间为1 s。具体的PID控制器系统仿真图如图8所示。在PID控制和模糊控制系统中分别在40 s时以幅值0.3 V的阶跃信号作为干扰信号,仿真时间改为60 s,仿真结果如图9所示。
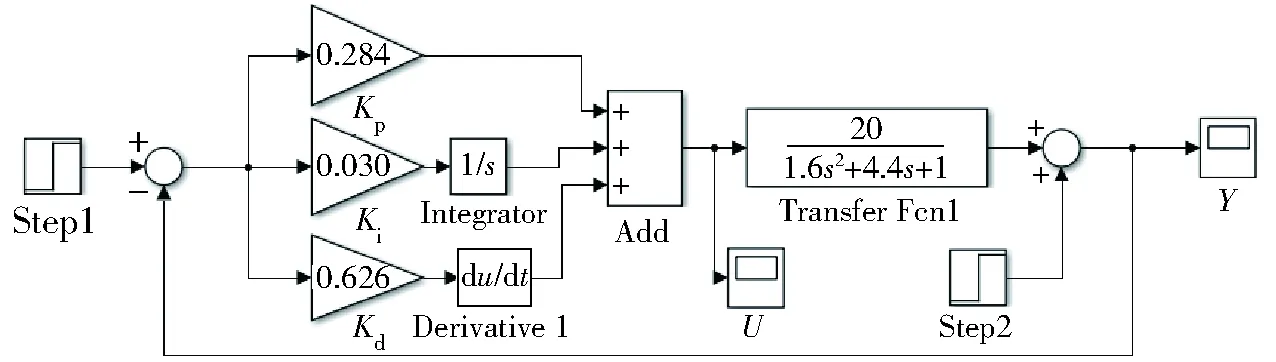
图8 PID控制器系统仿真图 Fig.8 PID controller system simulation diagram
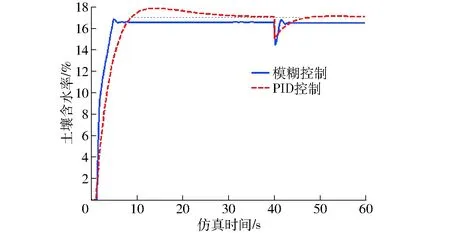
图9 PID与模糊控制仿真比较 Fig.9 Comparison of PID and fuzzy control simulation
在40 s处加入干扰信号可比较两种控制器的抗干扰性,由仿真结果可得出仿真数据,如表2所示。
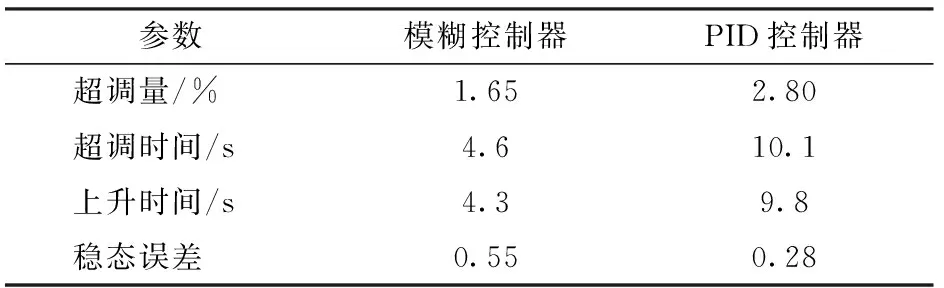
表2 模糊控制器与PID控制器性能指标 Tab.2 Performance index between fuzzy controller and PID controller
由表2可得,模糊控制器和PID控制器都可以实现对被控系统的控制。PID控制超调量大,调节时间长,动态性能差,但控制精度较高,模糊控制则相反,动态性能好,基本没有超调,受到干扰后在更短的时间将信号调整到正常值,即具有更强的抗干扰性。但存在模糊化而引起的稳态误差,总体性能较PID控制器更适应本系统。
3.2 果园试验
为验证该系统的有效性,本文选取华南农业大学园艺学院荔枝园进行实地试验,试验现场采集数据的传感器节点如图10所示。

图10 传感器节点 Fig.10 Sensor node
在荔枝园内的2个区域进行系统智能灌溉性能测试,其中一个区域(A区)部署一个传感器节点和一个电磁阀节点,传感器节点和电磁阀节点采用相同的PCB板,区别为传感器节点外接土壤含水率传感器,电磁阀节点外接双稳态脉冲电磁阀模块,实物图如图11所示。

图11 PBC板、传感器和电磁阀模块实物图 Fig.11 Sensor and solenoid valve nodes
传感器节点每隔30 min监测一次土壤含水率,并智能控制电磁阀对荔枝树的灌溉。另一个区域(B区)部署一个传感器节点,用来监测该区域的土壤含水率,但不灌溉。其中土壤含水率17%为荔枝树生长最佳环境。2016年4月7—24日土壤含水率如表3所示。
由表3可知,在试验期内,A区通过智能灌溉方法,使得该区的土壤含水率平均值为17.85%,均高于荔枝生长的最佳土壤含水率的下限(15.55%),达到预期灌溉效果[20-21],并且高于B区土壤含水率平均值7.75%。A区每次灌溉时,其土壤含水率均会迅速上升,然后缓慢下降,说明系统根据模糊规则及时调节土壤湿度,有较强实时性,反应速度快,较好地满足了荔枝生长的需要。
3.3 模糊控制器优化仿真
Simulink仿真的本质是利用某种求解器对系统状态方程进行求解。S函数能够接收来自Simulink求解器的相关信息,并对求解器发出的命令作出适当的响应,这种交互作用类似于Simulink系统模块与求解器的交互作用。Simulink设计了固定格式的S函数接口,通过S函数可将系统的数学方程表达式与方框图表达形式联系起来[22-25]。显然,S函数是整个Simulink动态系统的核心。
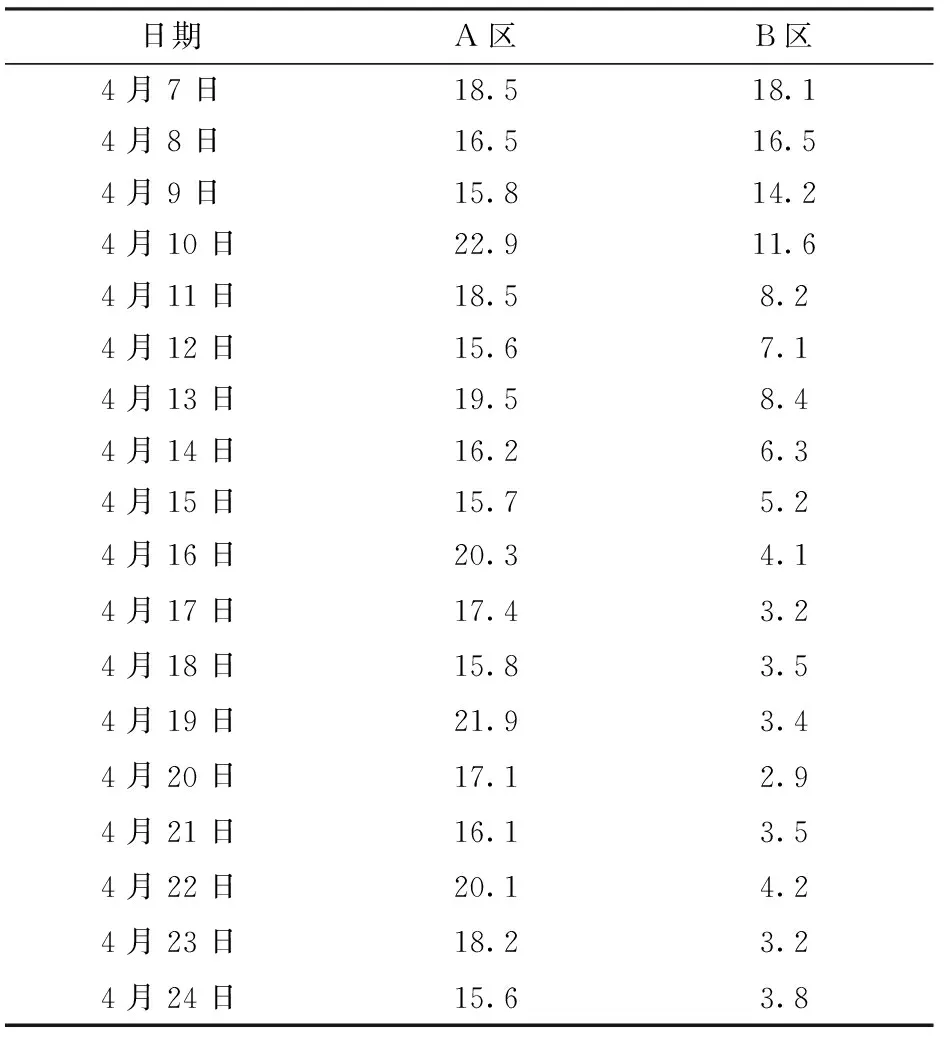
表3 土壤含水率 Tab.3 Soil moisture content data %
在多次仿真中,可得出误差较大时,选择较小的Ke和Kec,减小误差分辨率,而选择较大的Ku,加快系统响应;随着误差变小,Ke和Kec逐渐增大,而Ku逐渐减小。
仿真时,将S函数模块填入该文件,与Simulink工具箱中特定工具组成S函数模块,如图12所示。
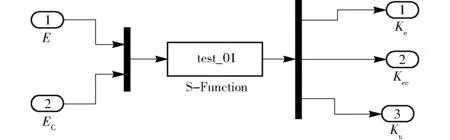
图12 S函数模块 Fig.12 S function module
将该模块与模糊控制器对接,组成优化后的模糊控制器及参数自调整模糊控制系统,如图13所示。其工作流程与上文所述的模糊控制器相似,其不同点为该模糊控制器通过S函数实现了量化因子和比例因子自调整,提高了模糊控制器性能,使其决策更精确。
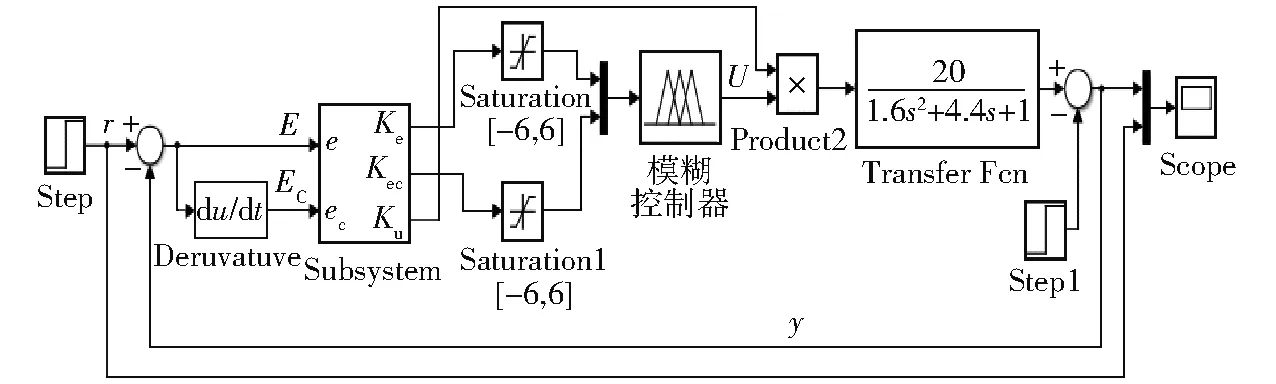
图13 参数自调整模糊控制系统仿真图 Fig.13 Parameter self-tuning fuzzy control system simulation diagram
对上文的模糊控制器和用S-函数优化的模糊控制器进行以同样的阶跃信号为输入,并分别在20 s时以幅值为0.3 V的阶跃信号作为干扰信号,进行仿真,对两种模糊控制器的控制性能进行比较,如两种模糊控制器进行控制时的超调量、超调时间、上升时间、稳态误差和抗干扰性。比较结果如图14所示。
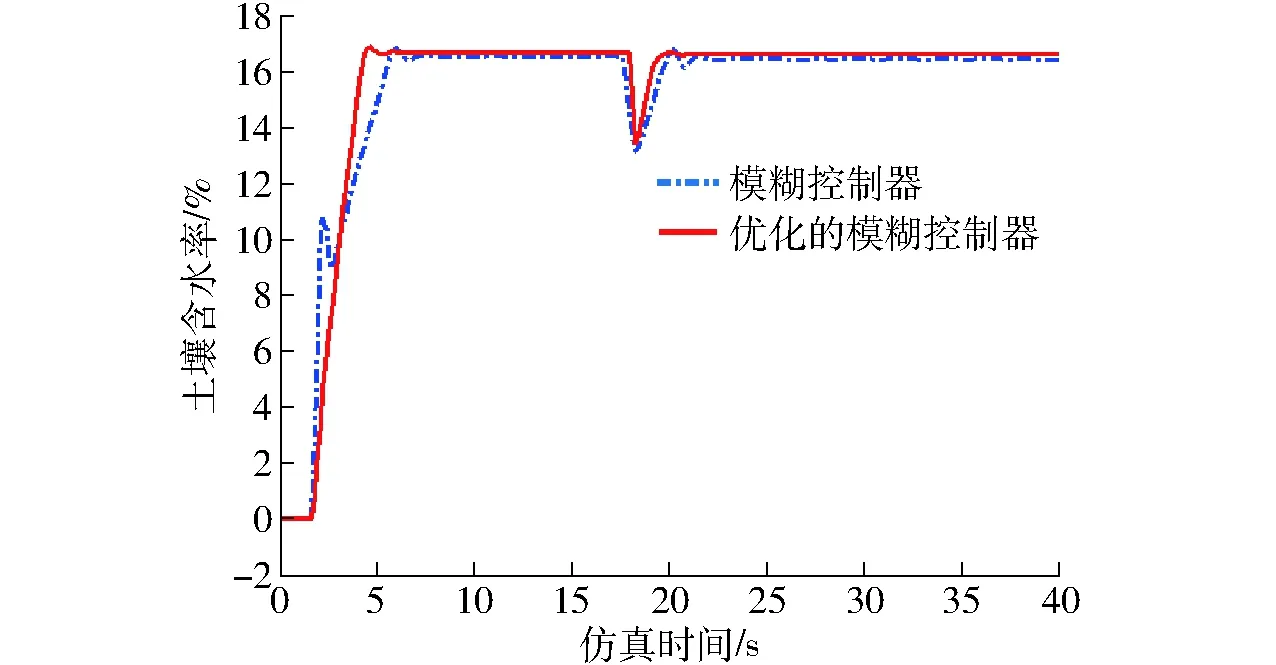
图14 模糊控制器与优化后的模糊控制器性能比较 Fig.14 Performance comparison between general and parameter self-tuning fuzzy controller
由仿真结果得到经S函数优化后的参数自调整模糊控制器的暂态性能指标,如表4所示。
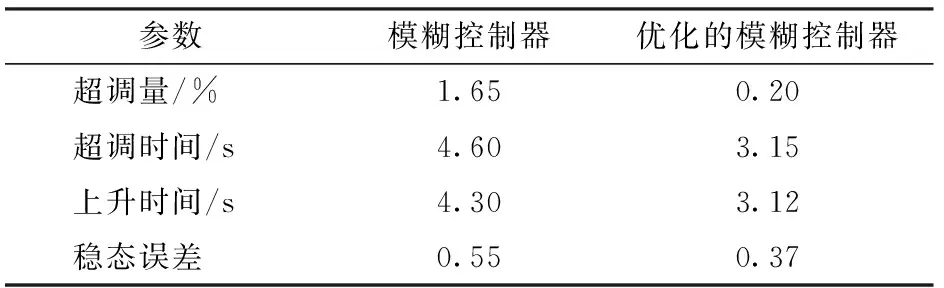
表4 模糊控制器与S函数优化的参数自调整模糊 控制器性能指标 Tab.4 Performance index between fuzzy controller and parameter self-tuning fuzzy controller of S function optimization
由表4可知,用S函数优化的模糊控制器具有较好的暂态性能,如超调量基本趋近于零;较短的超调时间和上升时间;该模糊控制器具有更小的稳态误差;受到干扰后在更短时间内将信号调整到正常值,即具有更强的抗干扰性。
综上所述,用S函数优化的参数自调整模糊控制器的控制精度更高,能提升灌溉模块控制系统的控制性能。
3.4 优化模糊控制灌溉系统田间试验
在试验场地C另加一组试验,该试验场地器材布置、场地环境、土壤环境均与3.2节所述的场地A、B试验环境相同,进行另外一组智能灌溉控制与监测试验,验证利用S函数优化的模糊控制灌溉系统的性能。其监测结果如表5所示。
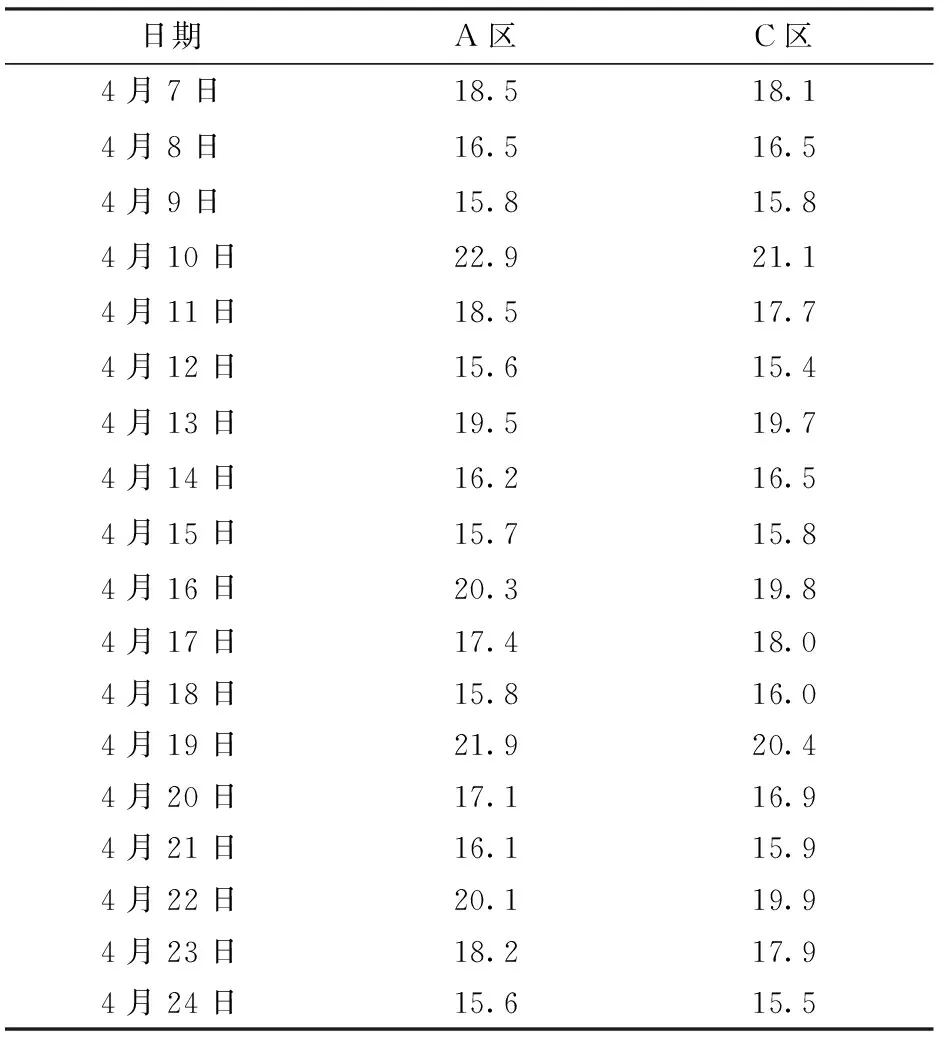
表5 A、C区土壤含水率比较 Tab.5 Comparison of soil moisture content data %
由表5可知,C区采用优化后的模糊控制灌溉系统的智能灌溉方式,土壤含水率的平均值为17.6%,相比优化前模糊控制灌溉系统的灌溉结果,优化后的模糊控制灌溉系统具有更强的稳定性、抗干扰性以及更高的控制精度,并且,在试验中发现,采用优化后的模糊控制灌溉系统,接收到土壤含水率数据之后能更快地调节土壤含水率使土壤含水率接近土壤最佳含水率并趋于稳定,其性能有了明显提高。
4 结束语
经过计算机模拟、实际测试表明,基于模糊控制器的智能灌溉系统对荔枝园灌溉进行了有效控制,使荔枝园土壤含水率维持在17.8%左右,符合荔枝树的生长环境;同时,基于优化后的模糊控制器的智能灌溉系统将荔枝园土壤含水率平均值控制在17.6%,更接近系统预设荔枝园土壤最佳含水率17%。试验证实该系统满足实际要求。
猜你喜欢
岭南音乐(2022年4期)2022-09-15
成都信息工程大学学报(2021年6期)2021-02-12
湖北农机化(2020年4期)2020-07-24
电子制作(2019年16期)2019-09-27
中国(俄文)(2019年8期)2019-08-24
中华建设(2019年5期)2019-07-05
意林·全彩Color(2019年4期)2019-05-11
电子制作(2018年23期)2018-12-26
艺术评鉴(2017年1期)2017-03-24
电子制作(2016年21期)2016-05-17
