长江下游航道风雾情监测系统的设计与实现
2018-08-28 08:55:14穆强
世界海运 2018年8期
穆 强
一、引言
长江航道是我国水路运输的主干道,内河水运量居世界之首。长江航道流经九省二市。长江流域是中国多雾的地区之一,且多为团雾(指局部范围内出现的更“浓”、能见度更低的雾)。长江下游地区江面宽阔,一般都超过2千米。航道内气象要素与陆地上气象站的监测数据相比有较大区别,具有监测站点少、预测难度大的特点。雾会导致能见度下降,影响船舶航行安全,加之长江下游船舶通行量大,航行船舶多有“扎雾”的习惯,大雾消散后,船舶都会立即发航,所以在局部时间的局部区域内,往往会形成船舶流量极其密集的局面。在众多的海损事故调查分析中获知,两船间发生的碰撞有90%以上是在能见度不良的情况下发生的[1]。
风浪对船舶航行安全也有较大影响,船舶进入大风浪区域航行时,船舶将出现较剧烈的摇荡运动、降速、航向不稳定,以及由此引发的其他操纵方面的困难,甚至出现难以预料的危险。长江下游地区夏季乃至春末秋初,强对流天气容易引起大风。2015年“东方之星”号客轮翻沉事故正是因为局部强对流天气形成的龙卷风造成的[2]。
为了保障长江下游航道的安全畅通,本文研究了特征站的能见度、风速、风向等气象要素的监测技术和手段,开发了航道风雾情监测系统,并在数字航道系统中应用,为长江航道部门应急调度指挥提供了重要的决策依据。
二、功能需求
目前,长江下游数字航道系统已经实现了航标基础信息的维护管理、800余座航标遥测遥控、船舶动态监测、部分辅助决策功能等,通过数字航道系统建设能实现航道作业管理的标准化、程序化、规范化。
然而,对于航道的实时风速、风向、能见度等对航道应急调度指挥具有非常重要意义的气象要素的检测,在数字航道系统中尚未实现。本文旨在研究一种风雾情监测系统,以弥补该方面的不足。
结合长江下游航道特点以及目前数字航道系统的欠缺,风雾情监测系统具有如下的功能需求:
(1)在长江航道重点地段实施风雾情监测,测量数据应达到中国气象局规定的航道作业标准。
(2)长江江面水气大,检测硬件应能适合临水环境,必须达到相关防护等级。
(3)系统需24小时无间断作业,当监测终端出现机器故障或断电时,能提供存储备案保证数据正常存储,以备决策部门查阅。
(4)系统需要留有接口,能供数字航道系统调用,作为数字航道系统的扩展功能模块。
三、系统结构
如图1所示,航道风雾情监测系统包括了前端设备、后台服务器以及客户端三大部分。其中前端设备主要包含能见度传感器、风速风向传感器、数据采集器、GPRS无线通信模块和光伏供电系统。[3,4]在其工作模式中,前端的检测传感器先将数据交给数据采集器进行打包,接着数据包经由GPRS模块发送到服务器端;服务器端的GPRS接收服务器接收数据并传入应用服务器,应用服务器进一步对数据包进行解码、重构和发布,用户再通过客户终端(如数字航道系统)获得数据产品。
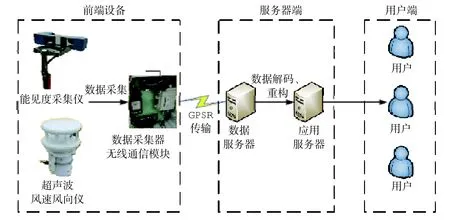
图1 系统拓扑结构图
四、前端检测硬件设备
(一)能见度仪
根据长江下游沿岸湿度大、腐蚀性强、局部团雾多等特点,选用TP-VISI1能见度传感器。该传感器量程达到10千米,测量误差在±10%以内,具备全天候工作、高智能化、高稳定性、防腐等优点。主要参数为:测量范围1~10 000米,准确度±2%(≤1 000米)、±10%(>1 000米),分辨率1米(≤1 000米)、100米(>1 000米)。
(二)风速、风向传感器
风速、风向传感器主要有机械式(风向标与风杯)和超声波式两种。其中超声波式风速、风向传感器相比于传统的机械式风速、风向传感器,测量精度更高,受环境影响更小,对于风速、风向的突变更为敏感,比较适合在长江沿线安装实施,综合比较,选用WS200-UMB型设备。其主要技术参数为:启动风速±0.3米/秒,风速精准度±0.3米/秒(0.6米/小时),风向精准度±3°。
(三)数据采集器
数据采集器是可用于远程监控和控制的小型系统,我们选用了CR300型数据采集器。该款采集器是入门级采集器,设计小巧紧凑,包含丰富的指令集,扩展性强,可兼容大部分水文、气象传感器。
(四)G PR S无线通信模块
GPRS无线数模块是采用GSM/GPRS网络为传输媒介的一款基于移动GSM短消息平台和GPRS数据业务的工业级通信终端。它利用GSM 移动通信网络的短信息和GPRS业务为用户搭建了一个超远距离的数据传输平台,标准工业规格设计,提供RS232标准接口,直接与用户设备连接,实现中英文短信功能、彩信功能、GPRS数据传输功能。
五、后台软件实现
(一)软件结构
风雾情检测系统软件主要由航道自动站程序、风雾情监测系统网站等部分构成,如图2所示。其中,数据采集器采集的数据通过GPRS方式接入后,传输到一个航道自动站程序,自动站程序将数据解码、重构后录入SQL Server数据库中。API程序则从数据库获取数据发布到接口,风雾情监测系统网站从接口获取数据后进行展示,为用户提供服务。
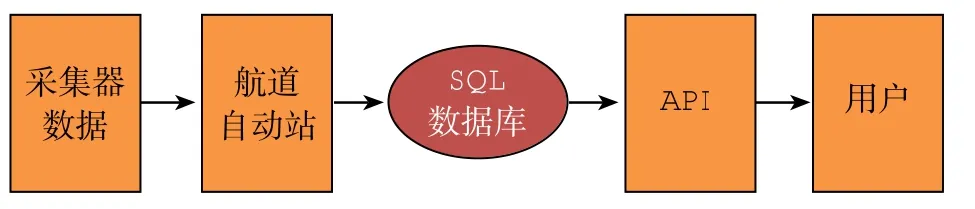
图2 系统软件结构图
(二)航道自动站程序
航道自动站程序是航道风雾情监测系统的核心程序。该程序有三个主要功能:
(1)读取串口通5.3转码的数据;
(2)把数据重构后,存入主数据库;
(3)监测当前站点数据和历史纪录查询。
图3显示了其设备管理界面,用于配置管理串口,添加、删除及管理数据采集器。图4显示了其历史纪录查询界面。

图3 设备管理界面

图4 历史数据查询界面
(三)风雾情A PI程序
为了强化系统的灵活性,将风雾情监测数据产品封装成风雾情数据接口供用户系统调用。数据接口的结构如表1所示。
数据接口将以JSON的形式返回,图5是接口调用一个示例,在该示例中包含了三个监测站在2018年4月26日10点30分左右的工作状态、风速、风向、能见度等监测数据。
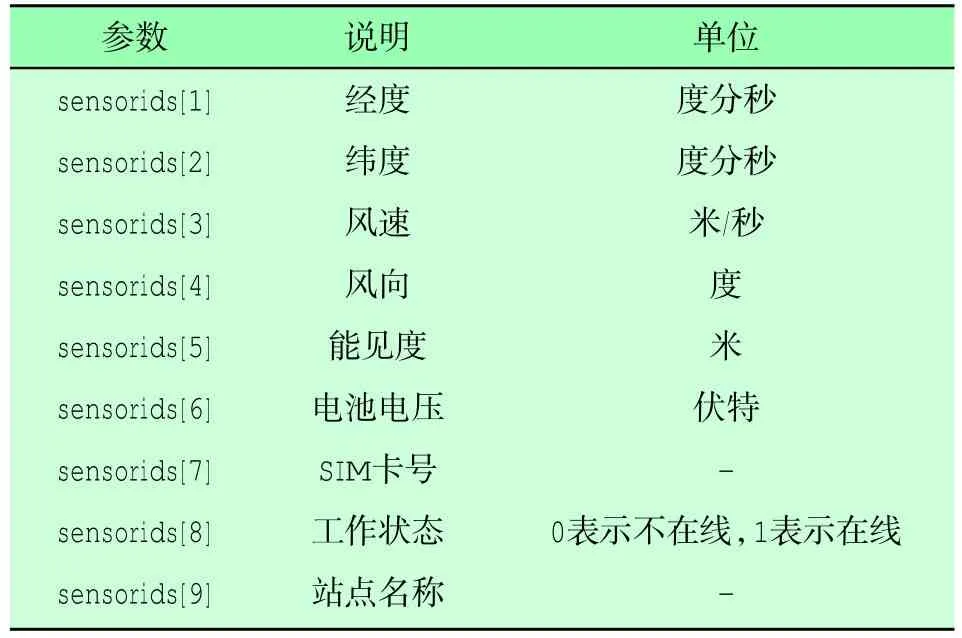
表1 数据接口结构
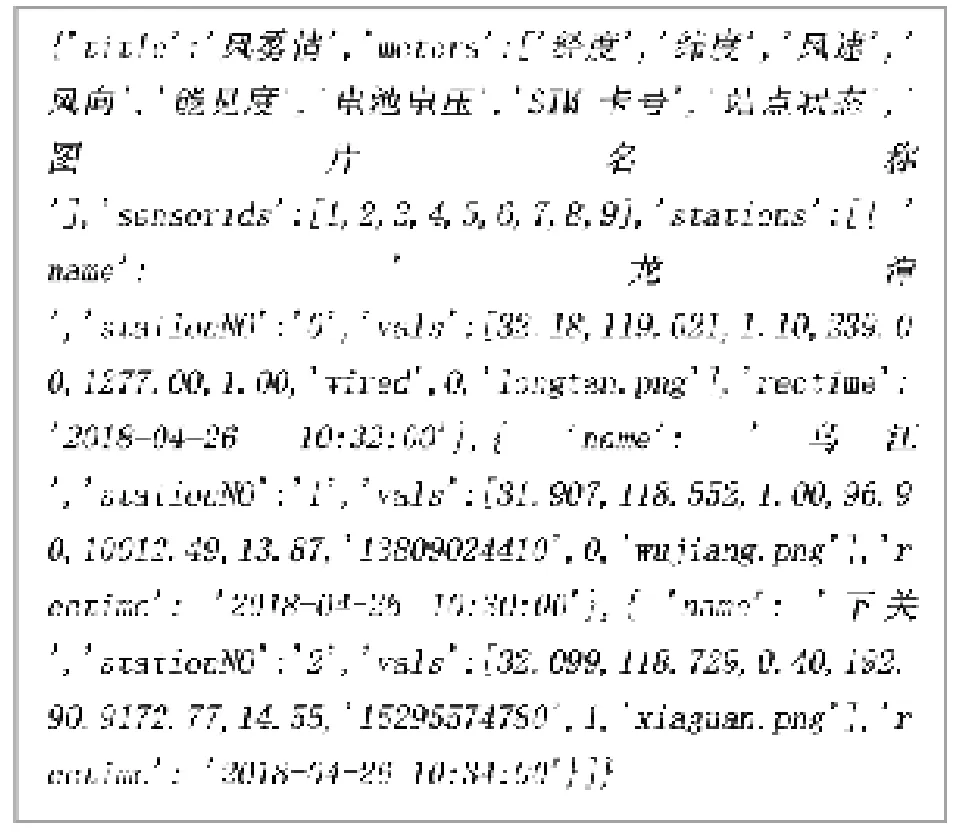
图5 接口调用一个示例
六、系统的示范应用
风雾情监测系统能够实时监测航道上的风速、风向、能见度,对航道维护工作船舶作业安全、过往行轮航行安全有重要意义。风雾情监测系统将前端采集的数据封装成接口,并在长江数字航道系统中做了示范应用,为航道部门应急指挥调度提供参考依据。
(一)应用部署
长江下游地区地势平坦,江宽水深,选择应用示范点时,选取了辖区内上、中、下三个特征区域,并分别选择了辖区下游的龙潭水道、中游的南京水道和上游的凡家矶水道,作为航道风雾情监控点[5]。
1.龙潭气象站
龙潭气象站部署在龙潭示位标三层平台。龙潭示位标是一座大型多功能岸标,高40.5米,位于长江右岸、龙潭港区起点处。该气象站的风雾情监测范围可覆盖长江南京段下游龙潭水道、仪征水道及南京四桥桥区航道水域的风雾情状况。岸标内接有市电及光纤,为站点部署提供了便利条件。受场地限制,将传感器安装于三层平台上。数据经RS232串口转RJ45网口进行传输。
2.下关站
下关站部署在#142红浮。#142红浮位于大胜关水道、南京水道和南京大桥水道的交汇点,紧邻下关中山码头至浦口轮渡航线,可反映出长江南京段中游草鞋峡水道、大桥桥区航道、南京水道、宝塔水道、大胜关水道的风雾情状况。#142红浮是一座直径6米的大型浮标。与普通浮标相比,6米浮鼓的浮面可利用空间大、稳性好、安全性好,比较适合风雾情监控系统硬件部署。传感器和数据采集器模块安装在浮标顶层,不影响航标功能,也不妨碍航标维护作业。浮标下层安装了光伏供电系统,为整个采集模块提供不间断的供电。数据通过GPRS传输。
3.乌江站
乌江站部署在乌江左右通航浮。乌江左右通航浮位于凡家矶水道、乌江水道的交汇处,可反映出长江南京段下游水域的风雾情状况。系统部署方案同下关站。
(二)在数字航道系统中的应用效果
长江下游“上浏段”数字航道系统于2016年12月31日上线试运行,该系统根据长江南京航道局辖区河段特点,对传统航道业务流程做到了程序化、模块化管理,以一条业务主线贯穿始终,将各项任务都串联起来,实现了航道监测到维护调度的联动,使系统从监控层面上升到监管层面。为了更好地聚焦公益服务,提升服务品质,系统除了对传统航道业务监管外,还添加了视频监控、桥区通航要素监控等作为辅助管理手段[6]。
我们在“上浏段”数字航道系统中调用风雾情API,根据辅助决策的功能需要,实现了以下3个主要功能:
(1)风雾情实时显示。在数字航道系统中加入风雾情模块,并在电子航道图的实际位置添加龙潭站、下关站、乌江站3个监测站。点击监测站图标,可显示出监测点的实时信息,如图6所示。
(2)技术参数分析。如图7所示,其下方的功能区内能展示出十分钟平均风速、风向、能见度信息及电池电压,并能根据历史数据自动绘制出24小时内的变化趋势,其中风速、能见度采用折线图,而风向采用风玫图。
如图7所示,根据风速、风向、能见度的等级对照表,用红、黄、绿3种颜色对数据设置预警级别,绿色底纹显示的数据代表正常,黄色底纹显示的数据代表一般预警,红色底纹显示代表严重预警,不宜开航。以此,可为用户提供简单易懂的决策依据。
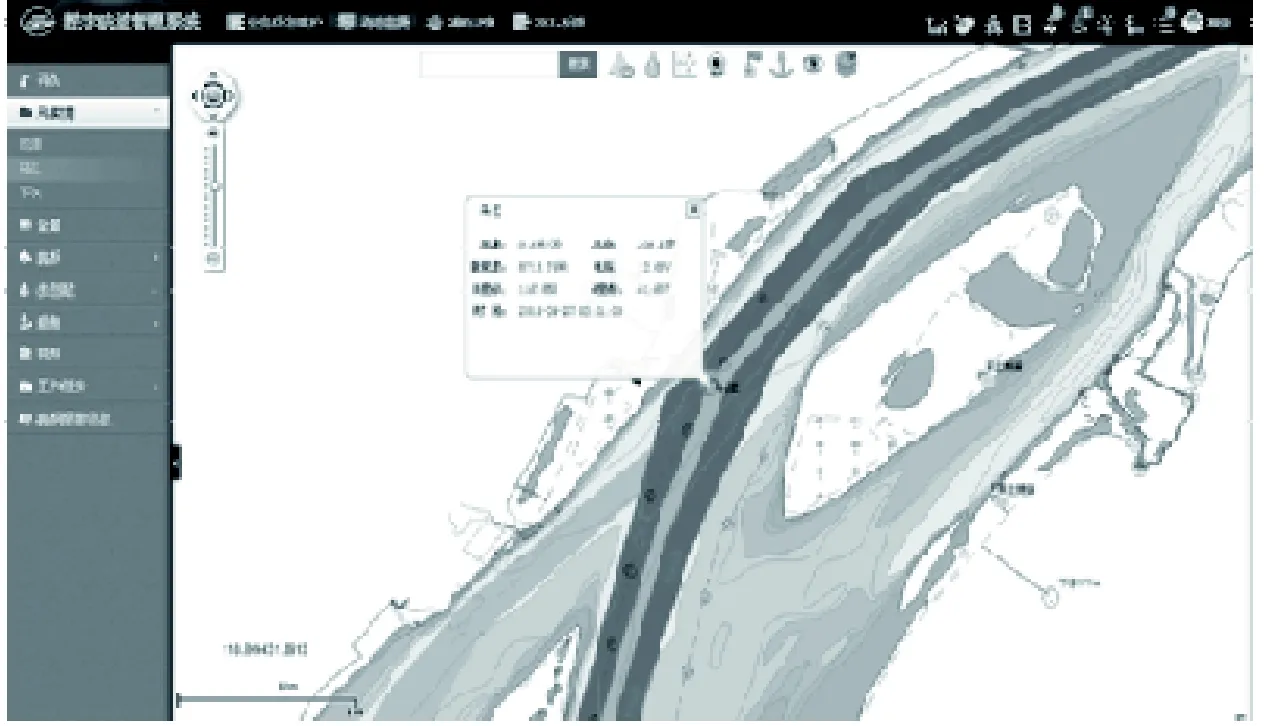
图6 数字航道系统风雾情模块主界面
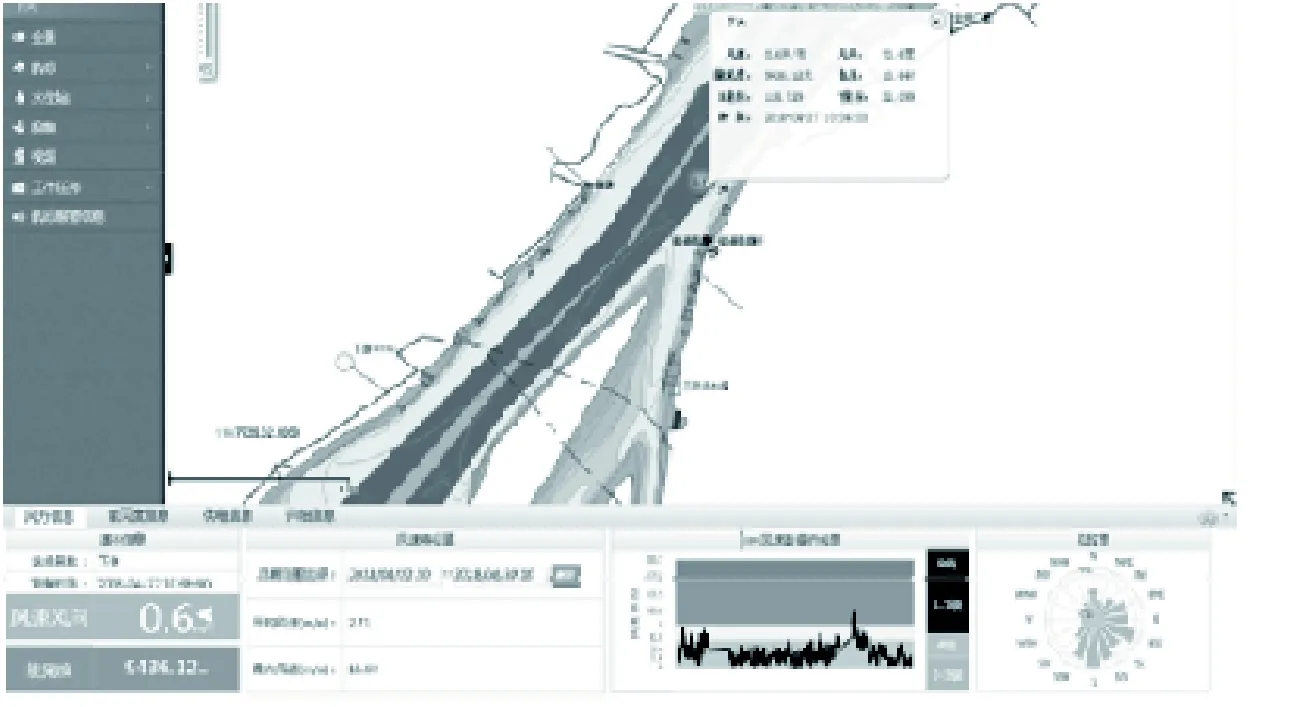
图7 数字航道风雾情数据分析界面
七、总结与展望
本文主要研究了长江航道风雾情监测系统建设的相关技术,研究了航道维护管理部门对风速、风向、能见度等气象要素监测信息的需求,完成了系统功能的设计,进行了传感器设备的选型。在软件设计时,从用户需求出发,开发前端设备管理和接受的航道自动站程序以及数据解码、重构和发布的监测数据API程序,可方便地在已有的数字航道系统中进行集成应用。最后,根据长江下游的特征选择了3个站点对系统进行示范应用,实现了在“上浏段”数字航道系统对风雾情的实时监控和预警分析,从而为航道应急调度指挥提供决策依据,使得系统的辅助决策功能得以补充。
虽然目前已经完成了风雾情监测系统的设计开发和示范应用,但受限于技术和安装环境等因素,系统仍有一些问题未得到很好的解决,在今后的发展过程中,系统主要有以下几个方面需要改进和完善:
(1)无线通信信号不稳定。前端采集器通过GPRS/GSM网络与服务器通信,在使用过程中发现通信信号不太稳定,时常离线。经研究发现与通信基站的布置有关,下一步可以和通信商进一步沟通或采用其他更稳定的无线通信方式传输数据。
(2)示范的监测站点分布过少,目前监测站的监测数据只能真实反映局部气象。长江水面上气象条件与陆地不同,常有团雾发生,本文中在长江南京段上、中、下游分别设置的示范监测站点并不能覆盖到长江南京段全线。下一步将在港区、桥区、锚区等重点水域增加监测站点,或采用更大量程的数据采集器应对。
猜你喜欢
中国石油大学学报(自然科学版)(2022年3期)2022-07-26 00:41:50
现代仪器与医疗(2021年1期)2021-06-09 05:53:54
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
小猕猴智力画刊(2018年2期)2018-02-26 17:21:49
计算机测量与控制(2017年6期)2017-07-01 16:24:05
计算机测量与控制(2017年6期)2017-07-01 16:24:04
中国三峡(2016年11期)2017-01-15 14:00:07
中国交通信息化(2016年6期)2016-06-06 07:11:30
海洋气象学报(2016年3期)2016-02-28 14:27:42
气象研究与应用(2016年4期)2016-02-27 12:23:16