基于表面肌电信号的肌肉疲劳状态分类系统
2018-08-28 08:53:04张珅嘉范赐恩
计算机应用 2018年6期
曹 昂,张珅嘉,刘 睿,邹 炼,范赐恩
(武汉大学电子信息学院,武汉430072)
(*通信作者电子邮箱fce@whu.edu.cn)
0 引言
肌肉系统是人体的重要组成部分,为人体的各项运动提供动力。但肌肉在反复工作后做工能力会显著下降,产生肌肉疲劳[1],从而影响人体的正常运动,甚至会对肌肉自身造成损伤。因此,人体肌肉疲劳状态的准确检测,是肌肉疲劳缓解与治疗的基础,具有重要的运动学和医学意义。
表面肌电(surface ElectroMyoGraphy,sEMG)信号作为肌肉运动时产生的微弱电流信号,其变化与参与活动的运动单位数量、活动模式和代谢状态等因素有关,能够实时准确地反映肌肉活动状态和功能状态[2],在康复医学领域的肌肉功能评价以及在体育科学中的疲劳判定中具有重要实用价值,多被用于检测人体特定部位的肌肉疲劳[3-4]。
近年来,对sEMG进行高信噪比的采集,并利用其时域、频域特征进行肌肉疲劳状态的检测成为了研究热点。针对sEMG的提取,Yamaguchi等[4]利用简易的放大器和模数转换模块来采集sEMG信号,并用存储卡将信号记录下来,提出了超小型低功耗FLA-500-SD系统,适用于全天候、可穿戴的sEMG信号监测,但是其存在信号采集精度低、噪声大,缺乏后续算法处理的问题;王粉娟[5]利用氯化银表面电极,结合以精简指令集计算机(Advanced RISC Machine,ARM)为核心的模拟及数字滤波器,自主设计sEMG检测系统,对本文sEMG硬件采集部分具有一定的参考价值,但是其使用了大量的分立元件,系统比较庞大。针对sEMG的肌肉疲劳检测,现阶段研究多从时域和频域角度提取特征,并取得了良好的效果[6-7]:王奎[8]提出利用时域、频域分析和时频分析结合的方法,综合评价肌肉疲劳程度。针对肌肉疲劳程度的分类算法,Naeem等[9]利用模糊逻辑算法针对50位志愿者进行了肌肉疲劳评估,并发现了肌肉疲劳与受试者年龄的关系;Chowdhury等[10]通过小波分解来识别肌肉疲劳;Li等[11]提出使用Boosting的方式来对肌肉状态进行别;Wu等[3]通过高斯支持向量分类器(Gaussian support vector classifier machine,GSVCM)对sEMG的多项特征进行肌肉疲劳分类,并比较了不同分类器在分类时的准确率和计算时间优劣,对本文的研究方法具有指导意义。但受限于sEMG信号的非平稳特性,上述工作所使用的分类特征在刻画复杂的肌肉疲劳状况变化时会有失准确,影响了整体的分类准确度。
由于肌肉的疲劳过程分为多个阶段,不同阶段的肌肉疲劳的时频特征有所差别,而现有的疲劳检测算法多针对于某一阶段,对于肌肉疲劳的整体检测有所不足;在肌肉疲劳的检测系统设计方面,现有的研究多集中于系统中的各个部分,如sEMG信号的采集,时、频域特征提取等,缺乏一个软硬件高度结合的、完整的检测系统。
针对上述问题,本文基于模拟前端ADS1299建立了一个软硬件结合的、完整的人体肌肉疲劳检测系统,将sEMG的采集、信号特征提取以及分类充分整合起来。首先,本文在人体右臂抓握过程中选取肱桡肌作为sEMG的检测部位,利用氯化银表面电极和ADS1299模拟前端实现对sEMG的采集。其次,进行sEMG的预处理,包括带通滤波和启发式小波阈值去噪。再次,对sEMG信号进行特征提取。在传统时、频域特征的基础上,本文加入了平均瞬时频率 (Mean Instance Frequency,MIF)以及带谱熵 (Band Spectral Entropy,BSE)特征来提高检测准确率,并对不同的特征组合进行分析。最后,本文将各项特征作为输入,采用含突变的粒子群优化算法优化支持向量机(Support Vector Machine optimized by Particle Swarm Optimization algorithm,PSO-SVM)分类算法将人体右臂肱桡肌的肌肉疲劳状态分为了两类——肌肉非疲劳状态和肌肉疲劳状态,取得了良好的效果。
1 sEMG的采集
1.1 sEMG的硬件采集设计与去噪
本系统采用TI公司最新出产的用于测量生物电势的模拟前端ADS1299作为采集前端,一端通过sEMG采集电极与人体肌肉表面相连,另一端通过芯片的SPI接口与作为主控制器(Main Control Unit,MCU)的MSP430单片机相连实现通信。MSP430主要负责通过控制信号(Control Signal,CS)配置ADS1299各个输入端的通断,设置ADS1299的寄存器、可编程放大器(Programmable Gain Amplifier,PGA)的放大倍数以及采样频率的值等。ADS1299数据采集完成之后,MSP430可以通过通用串行通信接口(Universal Serial Communication Interface,USCI)模块的通用非同步收发传输器(Universal Asynchronous Receiver/Transmitter,UART)模式与上位机通信,实现数据的传输以及对ADS1299的控制。硬件设计如图1所示。1.1.1 sEMG 采集电极

图1 sEMG采集硬件设计Fig.1 Design of sEMG acquisition hardware
硬件部分选用电势稳定、重现性高、内阻低、灵敏度高的氯化银贴片电极,通过非侵入式方法提取人体右臂肱桡肌sEMG。同时,采用三电极差分输入的方式,以提高采集信号的准确度。
1.1.2 AD 转换器 ADS1299
本系统采用德州仪器最新出产,用于测量生物电势的模拟前端ADS1299作为A/D转换器。ADS1299具有极低的等效输入噪声以及sEMG采集所需的功能特性,包括8个低噪声数据通道和8个高分辨率的模拟数字转换器(Analog to Digital Converter,ADC)、-110 dB的共模抑制比、灵活的可编程放大器(Programmable Gain Amplifier,PGA)以及串行外设接口(Serial Peripheral Interface,SPI)等。
ADS1299作为一款24位的高精度模拟数字转换器(Analog to Digital Converter,ADC),当参考电压为4.5 V 时最低可分辨的电压可达到0.536 μV。而肌电信号的幅度通常为1 mV左右,因此只需针对模拟信号设计简单的放大电路,就能够有效地进行模数转换,同时能够充分利用ADS1299的24位高精度。这样既避免了多级放大电路对信号的干扰,又缩小了整体电路的体积。放大前后以及滤波后的sEMG如图2所示,其中纵坐标电压表示的是模拟前端采集到的肌肉电信号的幅值。通过图2可以看出,模拟前端可以有效地采集肌电信号并抑制噪声。
1.1.3 微控制单元MCU及数据传输
本系统选用德州仪器出产的16位单片机MSP430作为主控制器(MCU),实现对ADS1299模拟采集前段的控制以及与上位机软件的数据通信。该单片机能够从任何LPMx模式中唤醒,不仅具有极高的稳定性,更有高性能、超低功耗等特点。
通过MSP430单片机与ADS1299构成主从机关系,实现双向通信。通过向MSP430烧录程序,利用主控制器(MCU)控制ADS1299的8个数据通道、选择合适采样频率和AD转换速率、调整可编程增益,以采集到放大后的sEMG数字信号。MSP430与ADS1299之间进行四线制的SPI通信,实现数据的同步收发。同时,MSP430通过USCI模块的UART模式与上位机通信,将AD转换后的sEMG数字信号异步传输至上位机中。
硬件部分各个模块的设计能够保证采集到低噪、高精度的sEMG信号,为后续sEMG时、频域特征的提取以及分类提供基础。
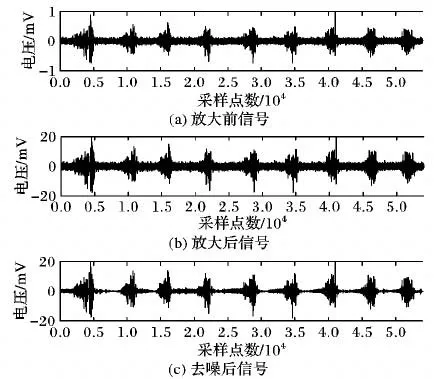
图2 sEMG放大前、放大后、滤波后时域信号对比Fig.2 Comparison of sEMG signals before amplification,after amplification and after filter in time-domain
1.2 小波阈值去噪
表面肌电信号是通过表面肌电电极从人体皮肤表面记录下来的、能够反映神经肌肉系统相关活动信息的生物电信号,其峰值在10 mV以内,有用信号能量分布在10 Hz~500 Hz,非常微弱[2]。在肌电信号采集过程中引入的噪声有工频噪声、白噪声、基线漂移干扰以及脉搏信号干扰,其中最主要的是工频噪声的干扰。工频噪声是由于电力系统引入的一种噪声,它是由50 Hz噪声及其谐波构成的一种固定频率干扰。由于工频干扰的幅度相对于肌电信号大很多,因此去除工频噪声干扰是工作的重中之重。白噪声是指由电子器件热效应产生的在整个频率范围内均匀分布的噪声;基线漂移干扰是指由于人的运动产生的干扰,其频率一般小于1 Hz;脉搏噪声是由于肌电信号采集过程中受到心跳信号的干扰引入的噪声。由于sEMG信号相当微弱,各种噪声尤其是工频噪声对纯净信号的干扰较大,因此需要对其进行有效的滤除。
由于sEMG信号的构成复杂,信号的非平稳部分存储着许多有效信息,如果使用传统的滤波方法则会丢失非平稳部分,导致有效信息缺失。因此本文使用自适应阈值的小波阈值去噪:通过小波的多层分解对小波系数进行削切、阈值化等非线性处理,以此达到滤除噪声的目的。该方法能够在一定程度上避免一般的低通滤波器滤波时造成的信号突变部分模糊的问题,而通过启发式阈值则可以更好地去除噪声。
对于工频噪声以及脉搏噪声,由于其频率相对固定,因此在对应频率段的小波分解系数进行门限处理就可以很好地去除这一噪声干扰。而对于高斯白噪声,根据理论分析,有用信号具有奇异性,即随着尺度增大,小波变换的模极大值的对数也会变大。但是高斯白噪声则相反,其具有负奇异性,因此可以对高频信号进行门限阈值处理来消除高斯白噪声[12]。
本文将sEMG进行10层分解,使用启发式阈值估计进行小波阈值去噪。
2 肌肉疲劳特征分析
肌肉疲劳是指肌肉系统最大做功能力或者最大随意收缩能力暂时下降的现象。本文根据sEMG的基本分析方法[4],使用时域、频域以及时频特征综合刻画肌肉的状态变化情况。
2.1 肌肉疲劳的时域特征
积分肌电图(Integrated ElectroMyoGram,IEMG)以及均方根(Root Mean Square,RMS)可作为时域特征描述肌肉疲劳过程中肌电信号sEMG的幅值变化情况。在最大等长收缩中,由于神经元激活速率的减小,sEMG信号的幅值降低;而在由疲劳造成的持续非最大收缩过程中,肌肉为提供足够的力量,其sEMG幅值呈现初始稳定最终增大的趋势。通过计算IEMG以及RMS可以直观地反映这种变化。IEMG和RMS的计算式为:
2.2 肌肉疲劳的频域特征
sEMG的频域特征主要是将其时域信号通过傅里叶变换转变为频域信号,然后分析信号的功率谱或频谱。sEMG的频域特征主要有中值频率(Median Frequency,MF)以及平均功率频率(Mean Power Frequency,MPF)等,本文在sEMG常用频域特征的基础上,加入带谱熵进行频域分析。
2.2.1 MF 和 MPF
在静态负载状态下,随着肌肉逐渐疲劳,中值频率MF和平均功率频率MPF减小。MF和MPF计算式为:

其中:PS(f)为sEMG信号的频谱;f1、f2为sEMG信号的频率范围。
实验发现,利用短时傅里叶变换得到的MPF和MF在一定程度上能够较好地表征肌肉的疲劳变化情况,但是由于傅里叶变换仅适用于平稳的非突变信号,因此当sEMG信号发生跳变时,基于傅里叶变换的频域特征并不能完全反映肌肉的疲劳变化情况。
2.2.2 带谱熵
带谱熵(Band Spectral Entropy,BSE)作为结合信息熵和带谱分解的方法,可用于人体表面肌肉电流信号sEMG的分析[13]。该方法的基本思路为:
1)选取合适的频带宽度,将采集到的肌肉电流信号频带分解为若干子带,并对子频带编号。
2)利用快速傅里叶变换(Fast Fourier Transform,FFT)对每一个子频带计算谱能量,记为Ei(i=1,2,…,n),并对所有谱能量进行求和,得到总的谱能量E:

3)依照总的谱能量,将各个子频带的能量进行归一化,得到每个频带上的能量分布概率:

4)根据信息熵的定义,肌肉电流信号的带谱熵BSE可表示为:

随着肌肉从正常状态进入疲劳状态,sEMG的带谱熵BSE随时间呈现下降的趋势,并且疲劳程度越高,BSE的下降速率越快,即BSE关于发力动作产生的次数进行线性拟合后,拟合直线的负数斜率越小。因此,可将肱桡肌发力产生的肌肉电流带谱熵BSE随时间的变化进行线性拟合,并以拟合直线的斜率作为判断肌肉是否进入疲劳状态的特征。
2.3 肌肉疲劳的时频特征
傅里叶变换等频域分析方法适合平稳信号的处理和分析,而部分肌电信号具有非平稳特征,因此单独的时域或频域特征无法精细地刻画肌肉的疲劳状态[7]。本文使用集合经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)结合希尔伯特变换 (Hilbert Transform,HT)对sEMG进行分析,得到信号的瞬时时频特征。
2.3.1 EEMD 特征分析
集合经验模态分解EEMD是针对经验模态分解(Empirical Mode Decomposition,EMD)的不足提出了一种噪声辅助数据分析方法。
EMD将复杂信号分解为有限个本征模态函数(Intrinsic Mode Function,IMF),所分解出来的各IMF分量包含了原信号的不同时间尺度下的局部特征信号。该方法依据数据自身的时间尺度特征进行信号分解,无需预先设定任何基函数。因此EMD在理论上可以应用于任何类型的信号的分解,因而在处理非平稳及非线性数据上,具有非常明显的优势。
针对EMD的模态混叠问题,Huang等[14]提出了EEMD这种噪声辅助数据分析的方法。通过向原始数据中加入高斯白噪声信号补充了信号的尺度缺失,使得信号在不同尺度上具有连续性,减小了模态混叠的程度。由于多次加入的白噪声互不相关,因此最终的分解结果不会受到白噪声的影响,唯一持久稳固的部分是信号本身。
为了分析EEMD与EMD的性能,本文从麻省理工大学贝斯以色列医院正常心脉节律数据库(MIT-BIH Normal Sinus Rhythm Database)[15]的sEMG信号数据库中选取了正常人的sEMG信号并截取4000个采样点,对其进行EMD以及EEMD的分解以此探究分解的效果。sEMG信号的原始波形见图3,其中横坐标代表了肌电信号的采样点,纵坐标代表了每一个采样时刻肌电信号的相对幅值。EMD结果见图4(a),EEMD结果见图4(b),其中IMF1,IMF2,…,IMF10为通过经验模态分解或者是集合经验模态分解分解得到的一系列本征模态函数,代表了原始信号在把不同尺度下的信号特征,反映了原始信号由不同尺度的特征信号的构成情况。

图3 MIT-BIH健康人sEMG信号Fig.3 SEMG signals of healthy people in MIT-BIH
对比EMD以及EEMD得到的结果发现,EEMD可以有效解决分解过程中的模态混淆问题,并且分解出的模态具有更加明确的物理意义。以分解得到的第三个本证模态函数(Intrinsic Mode Function,IMF)为例,EMD得到的第三个IMF与EEMD得到的结果相比更加混乱,其中明显混杂了其他的本征模态函数,模态混淆问题比较严重,进而导致信号的物理意义不够明确。

图4 EMD和EEMD对sEMG信号的分解结果Fig.4 Decomposition results of sEMG signals by EMD and EEMD
2.3.2 平均瞬时频率MIF
研究发现,利用本征模态函数IMF的平均瞬时频率(Mean Instantaneous Frequency,MIF)作为表征肌肉疲劳程度的特征,相比频域特征具有更高的稳定性和灵敏度[16]。假设共分解出N个IMF,每个IMF含有n个点,则有:
其中:mif(j)代表第 j个 IMF计算得到的平均瞬时频率(MIF);aj(i)代表第j个IMF第i个点对应的幅度值;ωj(i)表示第j个IMF第i个点对应的瞬时频率。
因此计算MIF的步骤为:
1)向原始的输入信号中加入随机白噪声。
2)将加入白噪声后的混合信号进行EEMD,得到一系列的本征模态函数IMF。
3)重复1)和2),得到多组IMF。
4)将多组IMF的对应的均值作为最终的IMF的值。
5)对最终的IMF进行Hilbet变换,得到IMF中每一个点所对应的瞬时频率ω。
6)利用式(8)计算得到每一个IMF所对应的平均瞬时频率 mif。
7)利用式(9)计算得到sEMG信号的平均瞬时频率MIF。
3 PSO-SVM肌肉疲劳程度分类
3.1 SVM 基础
支持向量机(Support Vector Machine,SVM)在解决高维小样本模式识别中表现出了许多的特有的优势。基于统计学习理论的VC维理论以及结构风险最小原理,支持向量机能够在模型的复杂性以及学习能力之间寻求最佳的兼顾方案,因此特别适合本项目的要求。
通俗来讲,向量机是一种二分类模型,其基本模型定义为核函数映射的特征空间上的间隔最大的线性分类器,即支持向量机的学习策略便是间隔最大化,最终可转化为一个凸二次规划问题。利用拉格朗日法对凸二次规划问题进行求解,得到优化目标以及约束条件为:
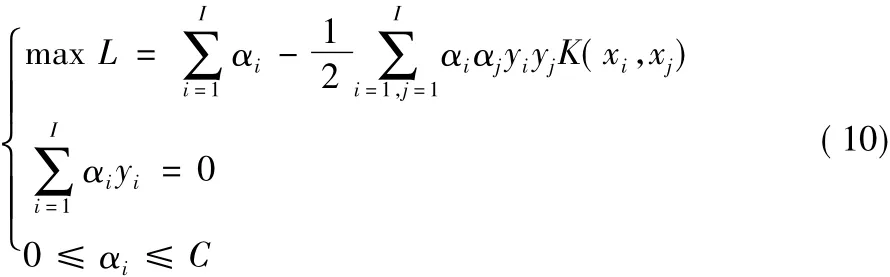
其中:核函数K(xi,xj)= φ(xi)Tφ(xj);C为惩罚系数;αi为拉格朗日乘子;L为特征空间的间隔。
3.2 PSO 优化 SVM
在应用SVM时需要解决两个重要问题:一个是核函数的选择;另一个则是模型参数的优化。本文选择效果较好的高斯核作为核函数,因此需要对高斯核的参数c和g进行优化。其中:c是惩罚系数,代表了对于错误的容忍程度;g是一个SVM核函数的分布参数。
由于参数c和g对SVM的学习能力和推广能力影响巨大,而常用的搜索方法如网格搜索得到的结果往往不是最优解,因此本文使用粒子群优化(Particle Swarm Optimization,PSO)算法对SVM进行参数优化。
PSO是一种进化计算技术,其基本思想是通过模拟鸟群捕食过程中的个体协作以及信息共享来寻求优化问题的最优解。PSO算法的优势在于收敛速度快,并且可以通过调整参数以及引入变异来调整局部搜索能力和全局搜索能力的关系,以此达到最理想的优化目标。
PSO算法首先随机初始化一个种群,每一个粒子在N维空间的位置矢量x代表着问题的一个解向量。每个粒子都有一个由目标函数以及自身位置共同决定的适应度值fitness value根据适应度函数值可以判断粒子的优劣。在第i次迭代中,粒子知道自己目前为止发现的最好位置pbesti和现在的位置xi,除此之外,每个粒子还知道到目前为止整个群体中所有粒子发现的最好位置gbesti。粒子通过自己目前的位置与自己发现的最好位置之间的距离以及自己的位置与种群最好位置之间的距离来决定下一步自己的运动方向,通过迭代寻找最优解。参数更新规则为:

式中:i=1,2,…,N,N是此群中粒子的总数;vi是粒子在第i次迭代中的速度;rand是介于(0,1)之间的随机数;xi指的是粒子在第i次迭代中的位置;c1和c2代表学习因子;gbesti和pbesti分别代表第i次迭代中的所有粒子的最好位置以及目前这个例子的最好位置,粒子根据这两个位置来调节自身的速度;惯性因子ω为一个非负数。ω其值较大,则全局寻优能力强,局部寻优能力弱;其值较小,则全局寻优能力弱,局部寻优能力强。
为了提高寻优结果,采用线性递减权值策略生成动态的ω。

其中:Gk为最大迭代次数;ωini为初始惯性;ωend为迭代至最大进化代数的惯性值。
为了避免结果陷入局部最优,本文引入了粒子突变机制,即粒子会有一定的概率产生突变,以此提高全局搜索能力,避免陷入局部极值。
PSO优化SVM过程如下:
1)随机产生种群、初始位置和初始速度,利用交叉检验计算适应度,并记录个体极值和全局极值。
2)更新种群的速度和位置,并且考虑更新后的速度和位置是否在允许范围内。
3)交叉检验计算适应度,并记录个体极值和全局极值。
4)将部分非最优的粒子进行突变,重新计算适应度。
5)如果未达到最大迭代次数并且适应度全局极值发生了变化,则回到步骤2)。
6)如果达到了最大迭代次数或者适应度全局极值多次迭代过程中保持不变,则停止迭代,输出结果。
7)利用获得的最优参数进行训练,并进行检验。
4 实验结果及分析
4.1 实验设置
本项目针对人体右臂肱桡肌进行实验。以TI公司的ADS1299作为模拟前端,采用AgCl贴片电极进行肌电信号的无创提取。AgCl贴片电极具有电势稳定、重现性好、内阻低、灵敏度高的特点。
本次实验选取15名20岁健康青年,在实验前1天内保证无剧烈运动,肱桡肌肌肉状态为非疲劳无损伤状态。受试者均用右手手持握力计利用肱桡肌发力,握力到达最大后立即放松并记录最大力Fmax。随后受试者仍用右手持握力计,肱桡肌发力达到最大力Fmax的60%后放松,以一次发力 放松作为一个周期T,且保证该周期时间T=3 s。利用EMG采集器采集30 s内10个发力—放松周期T的肌电信号并进行存储,作为非疲劳状态的肌肉电流数据。
为采集疲劳状态下肱桡肌发力的肌肉电流数据,让受试者右手手持握力计保持最大力Fmax的60%力量,持续150 s,确保肱桡肌达到疲劳状态。随后对每个受试者采集3组肌肉电流信号,每组30 s共10个发力 放松周期,并对采集数据进行记录,作为疲劳状态下肱桡肌发力时的sEMG数据。受试者从非疲劳状态到疲劳状态的肌肉电流数据的特征值变化如图5所示,横坐标中每一帧(frame)代表一个发力 放松周期。
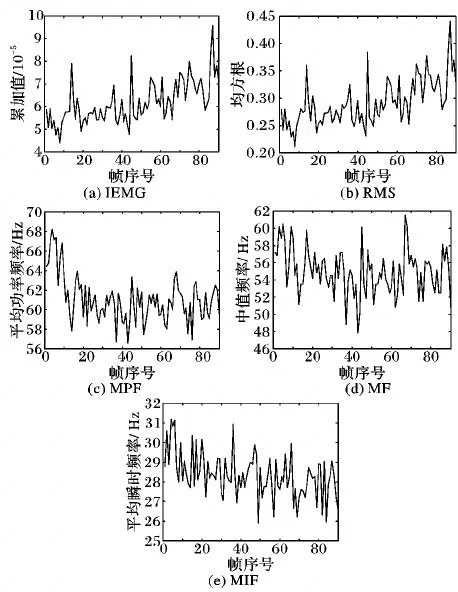
图5 人体右臂肱桡肌特征值变化Fig.5 Feature changes of human right arm brachioradialis
4.2 sEMG特征分析
利用Matlab对实验采集处理后的表面肌电信号进行时域分帧。由于肌电信号的采样率为2000 Hz,肱桡肌发力 放松的周期为3 s,因此将6000采样点的数据作为一帧,每组数据时域上分为10帧。针对一名受试者,分别计算其肱桡肌由非疲劳状态过渡疲劳状态到时sEMG的积分肌电图(IEMG)、均方根(RMS)、中值频率(MF)、平均功率频率(MPF),以及平均瞬时频率(MIF)特征,结果如图5所示。
根据研究可知,当肌肉疲劳时,IEMG和RMS值会增加[17],MPF、MF、MIF 会减少,即在频率谱中左移[16-18]。通过该组数据发现,随受试者肌肉进入疲劳状态,sEMG的IEMG和RMS总体上呈现增长的趋势,MPF、MF也呈总体下降的趋势,并且相对来说MIF具有很好的灵敏性。这是与理论分析以及之前的文献研究一致的。
对采集到的sEMG信号按照时域分帧计算带谱熵BSE。将带谱熵随帧数的变化线性拟合,求出拟合曲线斜率,如图6为前述特征,即同一受试者手臂肱桡肌非疲劳状态以及疲劳状态下10个发力 放松周期带谱熵线性拟合结果。
由图6可见,与疲劳状态相比,该受试者在非疲劳状态下,肱桡肌发力的肌电信号带谱熵无明显变化趋势,拟合曲线斜率为0.0041806。当肱桡肌进入疲劳状态后,肌肉电流带谱熵随发力 放松动作的重复呈明显下降趋势,拟合曲线斜率为负值-0.059139,验证了带谱熵下降程度,即线性拟合斜率可作为判断肱桡肌肌肉疲劳特征的结论。
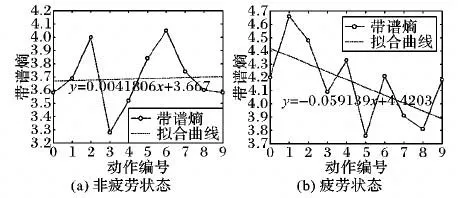
图6 右臂肱桡肌带谱熵Fig.6 Band spectral entropy of right arm brachioradialis
综合以上特征,本文选取不同特征组合进行后续分类,以比较不同特征组合的分类准确度,本文将时频域特征按不同特征类型进行分类,结果如表1所示。
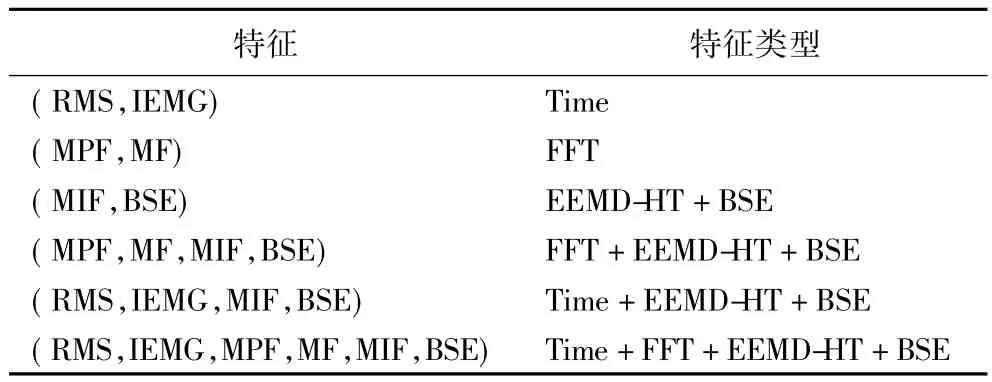
表1 肌肉疲劳特征特征类型Tab.1 Feature type of muscle fatigue features
4.3 PSO-SVM 分类
肌肉疲劳本身具有复杂的特性:疲劳的成因以及疲劳类型多样,例如静态疲劳、动态疲劳、局部疲劳等;不同的疲劳所对应的特征表现也不相同;疲劳类型会随着时间而变化;同时,肌肉收缩对电极存在一定程度的牵扯;肌肉发力方式在发力过程中可能产生变化;外部噪声干扰以及滤波器可能引起信号畸变等。这些因素都会影响到特征的灵敏性和准确性,因此通过单一特征描述整体疲劳特性往往不具有足够的可靠性。本文针对肌肉疲劳分析,在保证所有环境因素和受试者相同的前提下,改变分类的输入特征,设置不同特征类型进行分类实验(表1)。针对肌肉疲劳分析,典型的sEMG特征集中在时域和频域[8],常用的为 RMS、IEMG、MPF 和 MF,因此本文设置(Time+FFT)特征类型作为传统特征组;文献[3]提出针对MIF与(Time+FFT)结合的特征类型进行分类可以达到更高的准确性。而且,传统的频域分析对于非平稳信号的分析存在不足之处,作为时频分析的EEMD-HT可以弥补该不足,因此本文设置(EEMD-HT+Time+FFT)作为特征类型进行分类。文献[13]提出sEMG的带谱熵BSE可以作为肌肉疲劳程度的检测指标,且具有计算简单、实时性强、符合肌电信号非线性的特点,因此本文尝试将该特征与其他特征组合分析,分别设置(BSE+EEMD-HT)、(Time+FFT+BSE)和(Time+FFT+EEMD-HT+BSE)的特征类型,以分析不同特征结合的分类效果。
将上述特征类型通过以高斯核为核函数的PSO-SVM分为两类,即肌肉非疲劳状态与肌肉疲劳状态;同时设置传统SVM,以及网格搜索优化参数后的Grid-SVM进行对比,以分析PSO算法优化SVM参数的效果。在突变的PSO-SVM中,设置以5折交叉检验的准确度的均值作为适应度,将SVM的参数 c和 g作为粒子位置的 x和 y坐标。c1=1.5,c2=1.7,ωini=1,Gk=200,种群大小 sizepop=20,C 的优化范围为[1E -3,1E+7],g的优化范围为[1E -5,1E+5],突变概率为0.2。将得到的分类准确度与普通的SVM以及Grid-SVM进行比较,结果如表2所示。
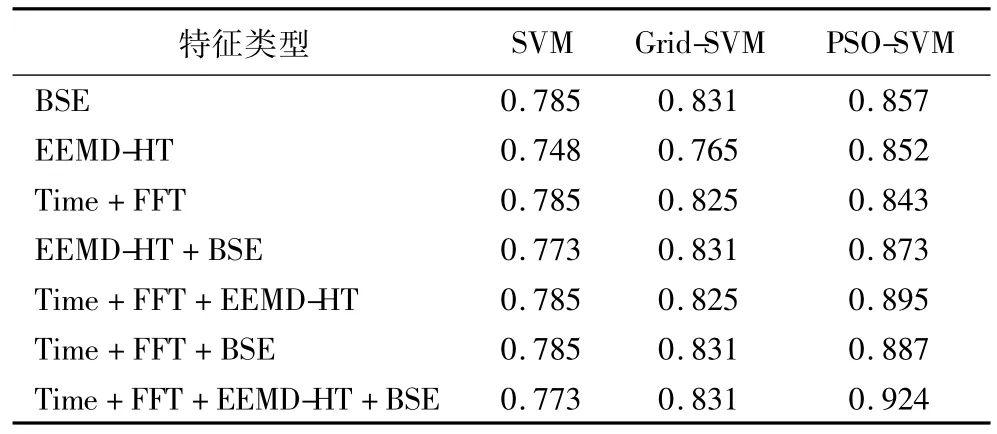
表2 不同算法对不同特征类型的分类准确度比较Tab.2 Classification accuracy comparison of different algorithms for different feature types
从表2中可以看出,在通过PSO-SVM进行分类时,针对sEMG传统时域与频域特征类型(Time+FFT)的分类准确率为0.843。在此基础上,对加入 EEMD-HT的特征类型(Time+FFT+EEMD-HT)的分类准确率为0.895,验证了文献[3]中引入EEMD-HT分析肌肉疲劳状态的正确性;特征类型(Time+FFT+BSE)的分类准确率为0.887,高于传统特征类型(Time+FFT),说明引入BSE特征能够提高传统特征类型的分类准确率;针对所有特征结合的特征类型(Time+FFT+EEMD-HT+BSE)的分类准确度为0.924,高于其他任何一种特征单独分类,或两两组合分类的准确度,说明在传统sEMG时域和频域特征的基础上,加入EEMD-HT和BSE构成新的特征类型,能够更加准确地描述肌肉疲劳状态。相较于文献[18]中提出的BSE单独特征分析,本文提出的(Time+FFT+EEMD-HT+BSE)特征类型解决了“单一特征描述整体疲劳特性往往不具有足够的可靠性”的问题;相比文献[2]中提出的采用(Time+FFT+EEMD-HT)特征类型分析肌肉疲劳,本文在此基础上加入带谱熵 (Band Spectral Entropy,BSE)特征,使分类准确度进一步提高。
为分析PSO算法优化SVM参数的效果,本文利用传统SVM和Grid-SVM对所有特征类型进行分类。根据分类结果表2,分别计算PSO-SVM相对于传统SVM,PSO-SVM相对于Grid-SVM,以及Grid-SVM相对于传统SVM分类提升的准确率,结果如表3所示。
由表3可以看出,PSO-SVM对所有特征类型的分类准确率均比传统SVM和Grid-SVM高。其中,POS-SVM对于特征类型(Time+FFT+EEMD-HT+BSE)的分类准确率,相比未经参数优化的SVM提升0.151,相比Grid-SVM提升0.093,是所有特征类型中分类准确率提升最高的一组,这说明利用PSO算法优化SVM参数,优于网格搜索优化方法,同时在对特征组(Time+FFT+EEMD-HT+BSE)的分类上效果最好,准确率提升最高。
综合以上分析,为了分析肌肉疲劳,本文通过在sEMG传统时域和频域特征的基础上引入EEMD-HT以及BSE,可以更为准确有效地描述人体右臂肱桡肌的疲劳状态;同时,通过PSO算法优化SVM参数,取得比Grid-SVM更好的优化效果,从而实现对肌肉的疲劳状态更为准确的判断。
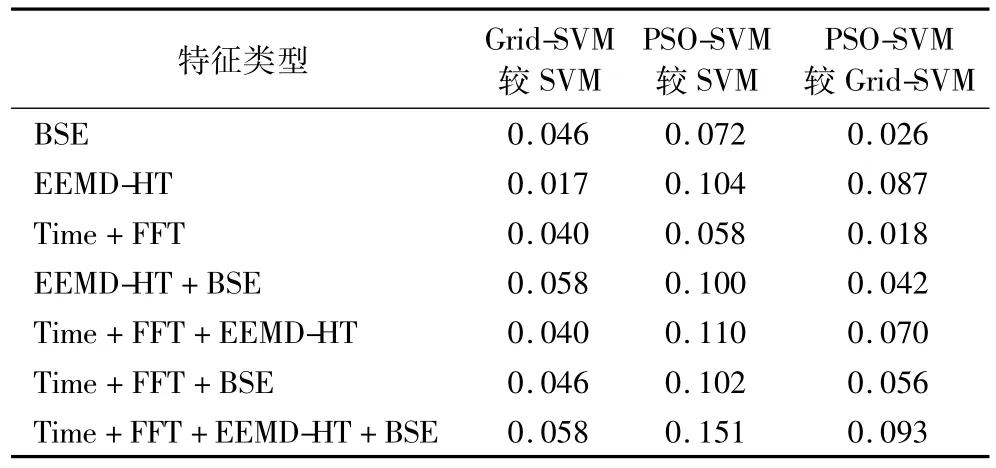
表3 不同算法对不同特征类型的分类准确率提升对比Tab.3 Promotion comparison of classification accuracy of different algorithms for different feature types
5 结语
本文建立了一个基于sEMG的肌肉疲劳状态检测系统,以人体右臂肱桡肌为主要研究部位,对15名健康男青年进行sEMG的采集。为对肌肉疲劳进行分析,在提取传统时域、频域特征(RMS、IEMG、MPF、MF)的基础上,引入 MIF与 BSE特征,并设置不同特征结合的7种特征类型用作对比分析。为划分肌肉疲劳状态,利用PSO-SVM对sEMG不同特征类型进行分类,同时设置传统SVM和Grid-SVM进行SVM参数优化效果对比分析。最终,发现所有特征结合的特征类型(Time+FFT+EEMD-HT+BSE),相比sEMG的传统时域和频域特征(Time+FFT),以及现有的一些特征分析(BSE)和(Time+FFT+EEMD-HT),能够最为准确地反映肌肉疲劳状态。同时,采用PSO算法对SVM参数的优化效果,优于网格搜索算法的优化效果,并且在针对特征类型(Time+FFT+EEMD-HT+BSE)的分类时最为显著。
可用于分析肌肉疲劳状态的sEMG特征还有很多,如肌纤维传导速度(Muscle fibre action potential Conduction Velocity,MCV)、中心频率(Center Frequency,CF)等,综合更多特征进行肌肉疲劳状态分类仍有待探索。此外,本文涉及的时、频域特征分析多为线性分析,目前也有学者利用sEMG的非线性特性进行肌肉疲劳状态的研究,但仍处于较为起步的阶段,有待更加深入的研究。
猜你喜欢
人类工效学(2019年6期)2019-03-21 05:44:48
中国体育科技(2018年6期)2018-12-13 05:02:00
测控技术(2018年11期)2018-12-07 05:49:02
雷达学报(2018年3期)2018-07-18 02:41:34
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
火控雷达技术(2016年1期)2016-02-06 02:17:55
西北工业大学学报(2015年4期)2016-01-19 03:31:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
电测与仪表(2015年3期)2015-04-09 11:37:24
电测与仪表(2015年2期)2015-04-09 11:28:50