
基于DIgSILENT仿真的最大功率跟踪和无功补偿研究∗
2018-08-28 02:50张建兴吴正全蒙帮勇杨昌春马中东刘昌宏
舰船电子工程 2018年8期
张建兴 吴正全 蒙帮勇 杨昌春 马中东 吴 捷 肖 龙 刘昌宏
(1.贵州电网公司都匀供电局平塘供电局 都匀 558300)(2.贵州电网公司都匀供电局 都匀 558000)
1 引言
随着大型风力发电技术的快速发展,变频调速型双馈风力发电技术在跟踪最大功率范围时,具有可变速度的特点[1]。文献[2]利用升压DC-DC转换器,可对变速风力发电机中最大功率跟踪进行一种简单的控制和分析。文献[3]分析了风力发电机的特点和最大风量,提出了一种无风速控制的策略。文献[4]回顾现有的最大风能提取算法,给出了一种智能的最大功率提取算法。
适合大规模风力发电的地区是在网络终端,电网结构在这方面相对薄弱,所以当风力发电设备连接到电网时,大规模风力发电可能会出现一系列的问题。如电压下降,增加系统的短路容量,改变系统的暂态稳定性等。因此,无功补偿功率的改善在电压稳定和提高传动效率中具有十分重要的现实意义。文献[5~7]讨论了SVC和STATCOM的原理结构、控制器模型以及动态补偿效应。
本文将分别建立风力涡轮机模型、轴模型和风力发电机模型的数学形式,利用曲线拟合法和爬山算法分别模拟了风能捕获,并运用DIgSLIENT仿真讨论最大功率追踪问题。通过建立SVC和STAT⁃COM两类设备的DIgSLIENT仿真,比较分析电网故障恢复过程中的无功补偿。
2 数学模型
2.1 风力涡轮机模型
风力涡轮机是将风能转化为机械能的部件。涡轮机以一定的速度和角度,使桨叶旋转从而使风能变成机械能,驱动发电机。风力发电机组将风能转化为机械能的过程是一个复杂的空气动力学过程[8],难以准确描述。根据Betz定律[9],风力涡轮机捕获的机械功率为

其中,P是风力涡轮机捕获的电能,ρ是空气密度,R是涡轮叶片的半径,v是风速。Cp风力发电机组的风能利用系数,其物理意义为:风轮自然风吸收的能量与转子扫掠区内未扰动空气中的风能之间的百分比。Cp是叶尖速比λ和螺旋角β,它可以用下面的非线性函数来模拟:

2.2 轴模型
轴驱动系统主要包括风轮机、驱动齿轮箱和传动轴。一般情况下,变速箱和风力涡轮机相当于一个质量,双馈发电机是一个质量,从而建立了两个质量的轴系驱动模型。如图1所示。

图1 轴模型图
两个质量模型为

其中,w和G分别代表涡轮机和发电机,θ是轴的扭转角,k为刚度系数,Jw和JG分别代表涡轮机和发电机的惯性时间常数,δw和δG分别代表风力机和发电机转子的阻尼系数,Tw是涡轮机转子的机械扭矩,TG是影响发电机转子轴的机械扭矩。已知差分变量的两个质量模型有4个,这将增加工作负荷从而影响仿真速度,因此我们需要令两个惯性时间常数等于1,得到简化轴模型如下:

其中,N为变速齿轮箱。则一个质量模型方程为

2.3 风力发电机模型
考虑到发电机的定子暂态过程和系统的瞬时状态,系统阶次的增加将带来耗时的增加[10]。由于定子的电磁瞬时速度比转子的速度快,对发电机的暂态稳定性影响较小,因此忽略了定子的暂态过程,即定子磁链的变化为零。发电机在两相同步转速旋转坐标系中的电压方程被转换为

将式(5)和(6)相结合,设置风力发电机的三阶方程。三阶模型能充分反映风力发电系统暂态的特点,且精度较高、计算速度快,在DIgSLIENT仿真中,风力发电机机电暂态模型将使用第三阶模型。
3 风能捕获
3.1 方法介绍
MPT的常用控制方法可分为三种类型:叶尖速比[11]、功率信号反馈[12]和爬山搜索[13]。本文试图通过在DIgSLIENT中列出两种不同的实现方法来比较风的MPPT控制。
方法1:曲线拟合法,可对风机的最佳功率曲线进行拟合。风机转速ω作为独立变量,功率P是转度ω的多项式表达,发电机的转速ω和功率P是一对一的关系。对风力发电机组实际有功出力进行反求,可以得到相应的最优转速作为转速参考值,输入转速控制器获得最优功率参考值,然后再输入双馈发电有功控制系统作为有功功率参考值。转速控制器作用:转速参考值与发电机转速测量值之差为误差值,控制器输入值PI获得有功功率参考值。如果实际速度等于参考转速值,则转速控制器输入信号为0,代表着不工作;否则,速度控制器将持续控制,直到风力发电机输出相应的最佳功率。这样曲线拟合函数的最大风能捕获取决于最大功率跟踪模块的实现、转速控制器和双馈电机的功率控制。如图2所示。

图2 MPT与转速控制器模型结构
方法 2:爬山算法[14]的局部优化,具体算法如下:首先,设定发电机转度ω和有功功率P的初始参考值。其次,通过观察P和ω的变化并与以前相比,如果两个变量的变化趋势是相同的,则计算将正常迭代进行。最后,将当前计算数值加上前一个循环的参考值,得到一个新的参考值。
实施过程:在控制周期间隔n和n-1次采样控制周期内,抽样P和ω和观测当前的P和ω进行比较。如果P增加,则继续求解ωstep,否则使步长ωstep反转。最后,当前的ωstep加上前一周期的参考速度,将得到一个新的参考值,参考速度值输入转速控制器且参考有功功率值是由PI控制器得到,然后输入到发电机有功功率控制器。如图3所示。

图3 爬山算法结构图
计算ΔP和Δω:
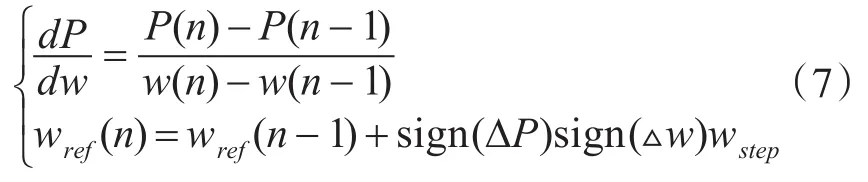
其中,如果 x≥0,则 sign(x)=1;如果 x<0,则sign(x)=-1。重复上述过程,改变发电机的转度,直到系统参数对输出功率不再改变,如果功率变化为零,则系统达到了当前最大功率点的风速。
3.2 实例比较
1)恒定风速13 m/s时,两种MPPT结果的比较如图4所示。

图4 用曲线拟合方法和爬山算法的输出值
结论:上述两个图的坐标系从0.8984~0.8992不等。结果表明,这两种方法的精度都达到了要求,因为间隔范围保留小数点后的3位数。在曲线拟合方法中,输出功率参考值在较小的范围内仍呈近似线性增长;而在爬山算法中,参考值呈现小幅波动。很明显,爬山算法的波输出更稳定,使风力发电机的有功功率输出跟踪更加稳定,解决了风速稳定条件下动力输出平稳的问题。
2)在0s~17s内的风速保持 10m/s,17s时风速跃至15m/s,两种MPPT结果的比较如图5所示。
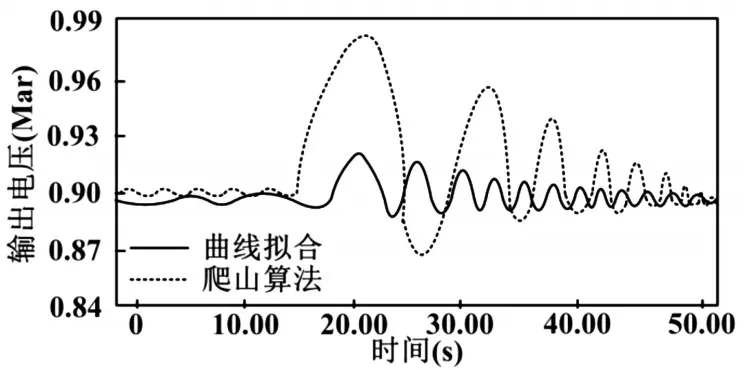
图5 用曲线拟合方法和爬山算法的输出值
结论:爬山算法计算波动的比曲线拟合方法大。在17s时风速突然增加条件下,爬山算法,输出功率参考值的波动从0.9p.u.达到0.975p.u.,然而,在曲线拟合方法中,输出的参考值波动从0.899p.u.达到0.92p.u.。但是爬山算法中,计算时间较短,仅需要大约30s达到稳定状态,而在曲线拟合方法约40s达到稳定状态。因此,可以得出结论,恒定步长下爬山算法适用于风力较少的波动情况,而且风力发电机的惯性不能太大,否则不能及时跟踪到最大功率点。
4 无功补偿
在短路故障过程中风力发电机将触发转子保护,这将使得风力发电机在短时间内异步运行。因此,连续运行的风力发电机需要吸收大量的无功功率,从而降低电网的稳定性和系统的功率因数,并增加线路损耗。因此,无功补偿对改善风力发电系统的稳态和动态性能具有重要的现实意义。本文将对两种应用广泛的无功补偿装置SVC和STAT⁃COM的控制进行简要的介绍和模拟仿真。
4.1 STATCOM
STATCOM的基本原理是通过电阻和电抗或直接连接到电网的自交换桥电路制作的无功补偿装置[15]。根据电容的直流电压和交流电压的接入点,适当调整交流输出电压的幅值,桥接电路吸收并产生满足系统需求的电路无功电流相位,从而实现动态无功补偿的目的。

图6 STATCOM控制框图
如图6所示,观察到STATCOM连接总线交流电压信号的幅度和相位。通过PI控制器与设定参考值的幅度差值,计算PWM控制的信号,但信号需要连接到一个限制器,然后输入PWM。与此同时,锁相环测量的相位角用作使调制波与系统同步。它们在三相逆变桥的每一相位上都控制PWM,使PWM输出调制波的相位变化触发全控制装置(GTO/IGBT)。因此,STATCOM的AC侧通过当前的命令电流Iref改变了它的无功电流跟随。
4.2 静止无功补偿器(SVC)
SVC系统是并联电容器组和晶闸管控制并联电抗(TCR)的组合[16]。电容器组中的电容器可以用晶闸管(TSC)作为开关,也可以是永久连接(MSC)。通过TSC可对无功功率进行合理的分类,得到分级无功功率的变化。此外,TCR可以吸收连续无功功率。如果吸收的无功功率满足系统需要,则断开所有的TSCs。为协调控制TSC和TCR,系统可获得连续无功功率输出。
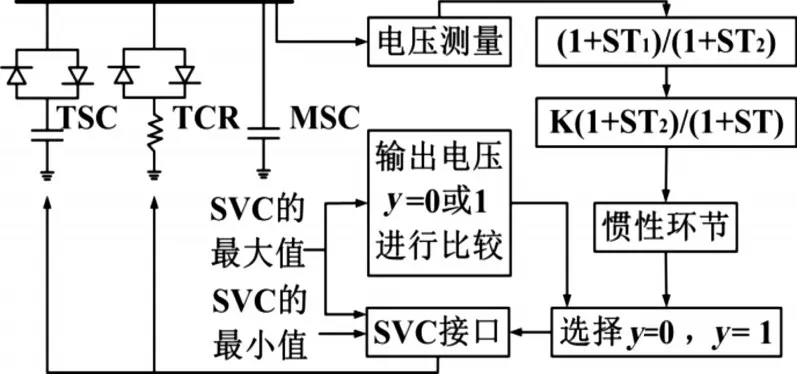
图7 SVC控制框图
如图7所示,SVC安装总线电压测量,测量电压依次发送到超前滞后校正环节、比例超前滞后校正环节和惯性元件,通过选择器输出结果的选择比较,可开启或关闭TCR和TSC的数字信号控制。在DIgSLIENT仿真中,还需要分别设置最小和最大无功功率控制模式的静态无功元件系统。
4.3 实验分析
在DIgSLIENT模拟中不考虑风场各单元之间的尾流效应,并假设每个风轮机加载的风量相同,因此,10个风力发电机组可以等效为1。在风力发电场中,风力发电机的额定电压是690V,通过终端10kV变压器连接到风电场的低电压总线,输电线路过程中每公里设置一个风电场升压站,最终将电压加大到110kV,最后使用20km传输电缆连接到外部电网。
风电场10kV低压总线分别接入相同容量的两种无功补偿装置并单独模拟。在风速达到13m/s的速度时,第二个升压站的110kV输电线路中发生短路故障,并将故障类型设定为三相短路故障:电压降为0.39p.u.,故障在5s内开始,持续100ms直到故障清理,本文主要对总线电压和无功补偿设备发出的功率进行比较分析:1)STATCOM无功补偿如图8和图9所示;2)SVC无功补偿如图10和图11所示。

图8 STATCOM补偿后总线电压波形
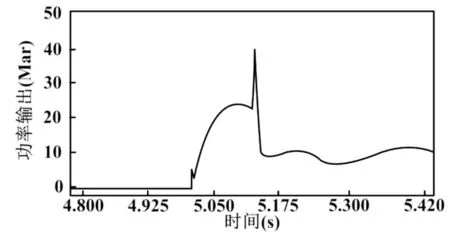
图9 STATCOM无功功率补偿
仿真结果分析:
1)与无补偿装置的情况相比,在故障期间,STATCOM电压从0.39p.u.提高到0.503p.u.,并产生大量的无功功率约20Mvar。在5.2s时故障消除,将对无功功率产生较大影响,因为电压恢复需要大量的无功功率。STATCOM动态补偿防止风力发电机作为异步发电机运行,由于低电压保护动作,吸收电能更多的转化为无功功率,使电压趋于稳定。
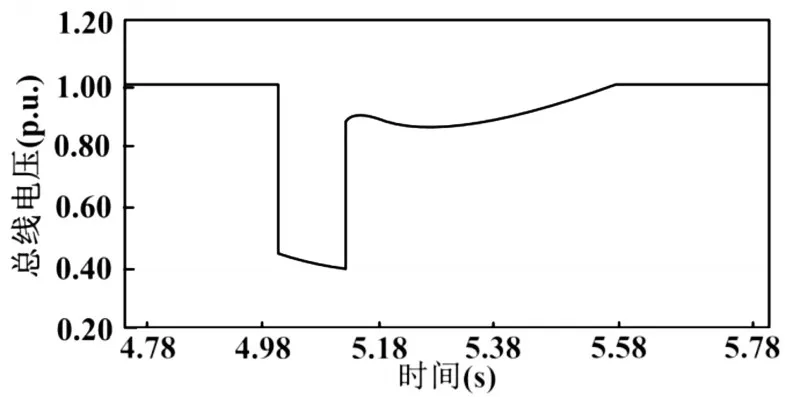
图10 SVC补偿后总线电压波形

图11 SVC无功功率补偿
2)SVC输出无功功率与总线电压的平方成正比。当故障发生时,总线电压降低使SVC补偿无功功率减少,电压从0.39p.u.变化到0.403p.u.,SVC的补偿能力将从14.35 Mvar提高到20Mvar,以帮助系统恢复电压。
3)从图中可以发现SVC和STATCOM可以控制无功功率,有效的维持系统电压稳定,提高系统功率因数。相比之下,STATCOM具有明显的优点:STATCOM补偿效果更好,可以获得更多的补偿,但STATCOM的控制更加复杂,变频器的成本也更高。
5 结语
本文分别对最大功率跟踪和无功补偿进行了DigSILENT仿真分析,利用曲线拟合方法和爬山算法分别对MPT建模进行求解,提高了爬山算法的控制,得出了爬山算法的输出更加稳定,且爬山算法比曲线拟合方法收敛速度更快。通过建立SVC和STATCOM模型仿真,比较分析了电网故障案例中这两类装备,STATCOM补偿能力的动态恢复更块,恢复且效果更明显。这些结论对实际工程应用具有一定的参考和指导意义。
猜你喜欢
医学美学美容(2021年21期)2021-11-20
现代计算机(2020年31期)2020-12-28
小天使·聪聪画刊(2020年4期)2020-09-10
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年31期)2018-12-06
价值工程(2017年31期)2018-01-17
中国实用医药(2017年10期)2017-05-15
科教导刊·电子版(2016年3期)2016-03-14
恋爱婚姻家庭·养生版(2013年2期)2013-05-14
