无动力助行外骨骼的机构设计和运动分析
2018-08-27 10:24梁观坡邹泽华
机电信息 2018年24期
梁观坡 邹泽华
(福州大学,福建福州350116)
0 引言
本文所探究的无动力助行外骨骼是立足于迫切的社会需求以及我国人口老龄化问题的严峻形势而产生的,依托于目前外骨骼机器人的综合控制技术及智能化机器人技术日渐成熟的背景,进行无动力助行外骨骼的开发设计是合理也是可行的[1]。
1 人体解剖学的相关术语
1.1 人体的三个基本平面及三条基本轴
三个基本平面与三条基本轴分别为矢状面、额状面、水平面,矢状轴、额状轴、垂直轴。
1.2 人体下肢关节的各种运动
髋关节可以实现屈曲(弯曲)及后伸(伸展)、外展及内收、外旋及内旋六种基本的人体下肢运动,而膝关节只有屈曲及伸展两种运动形式。
踝关节与髋关节的自由度数目一样,都是三个,它实现的是背伸、跖屈、内翻及外翻。
2 人体下肢的运动机理及步态分析
2.1 人体下肢运动机理
为了能实现无动力助行外骨骼与人体下肢的高度协调统一,自由度数目与分布以及下肢的关节为完成不同运动模式而做出的不同运动形式等方面二者都要保持一致。
在此基础上,再进行人体下肢的正常步态分析。
2.2 人体下肢步态分析
从图1不难看出人体完整的步态周期被划分为了支撑相(也称站立相)与摆动相两个时间段,即相位。
支撑相的定义为:地面与一侧脚掌接触的所有时间段,换言之就是从一侧足部的足跟着地开始算起到该足尖离开地面不接触的时间段,这就是平时所说的站立姿态。
对于摆动相,顾名思义,就是摇摆状态,与支撑相刚好相反,即从一侧足部的足尖离开地面开始算起到该足部的足跟接触地面的时间段。
其中,支撑相约占整个周期的60%,摆动相约占整个周期的40%。
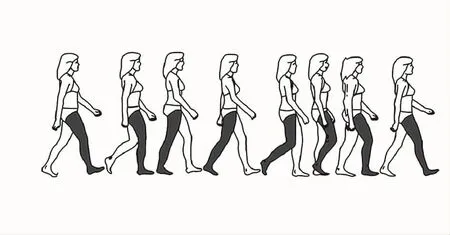
图1 人体右下肢的完整步态周期示意图
3 无动力助行外骨骼的机构设计
3.1 髋关节的结构设计
为使可穿戴无动力助行外骨骼康复装置能够适应不同身高、体重以及下肢损伤情况不同的患者之间的不同需求,设计了滑道,使储能弹簧能够在各自的相应滑道进行移动,从而实现无极调节的功能。髋关节离合器设计如图2所示。
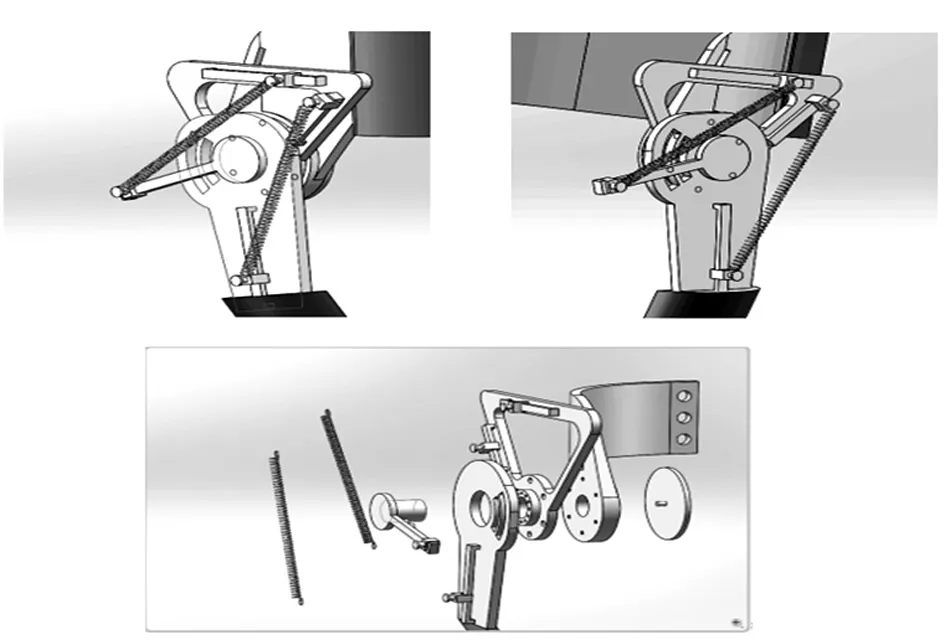
图2 髋关节离合器设计
对于图2髋关节离合器的设计,采用双弹簧的原因在于:
其一,将人体下肢在行走时从站立中期到站立后期这一过程中髋关节所做的功转化为弹性势能储存起来;
其二,两弹簧相对于转轴的力矩相等,可以增加患者下肢站立的稳定性[2]。
3.2 无动力助行外骨骼康复装置的整体建模
设计的主要思路就是合理配置系统的自由度,以最简单的关节结构满足无动力助行外骨骼的设计要求,图3为无动力助行外骨骼的整体三维模型。
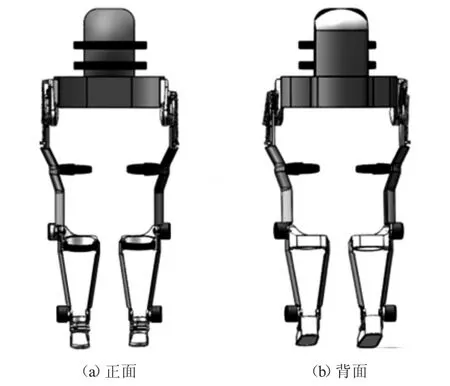
图3 加外壳整体三维模型示意图
4 基于Matlab的最佳弹簧刚度参数优化
选取弹簧1和3的刚度相同,弹簧2和4的刚度相同。分别选取0.5 N/mm、1 N/mm、1.5 N/mm、2 N/mm四个不同的弹簧刚度值,测试髋关节、膝关节及踝关节的力矩变化,取其最大力矩为研究值,针对获得的数据通过Matlab软件分别绘制髋关节、膝关节和踝关节力矩图,以便观察力矩随两对弹簧刚度值的变化趋势。最终得到了16组相关数据,如表1所示。
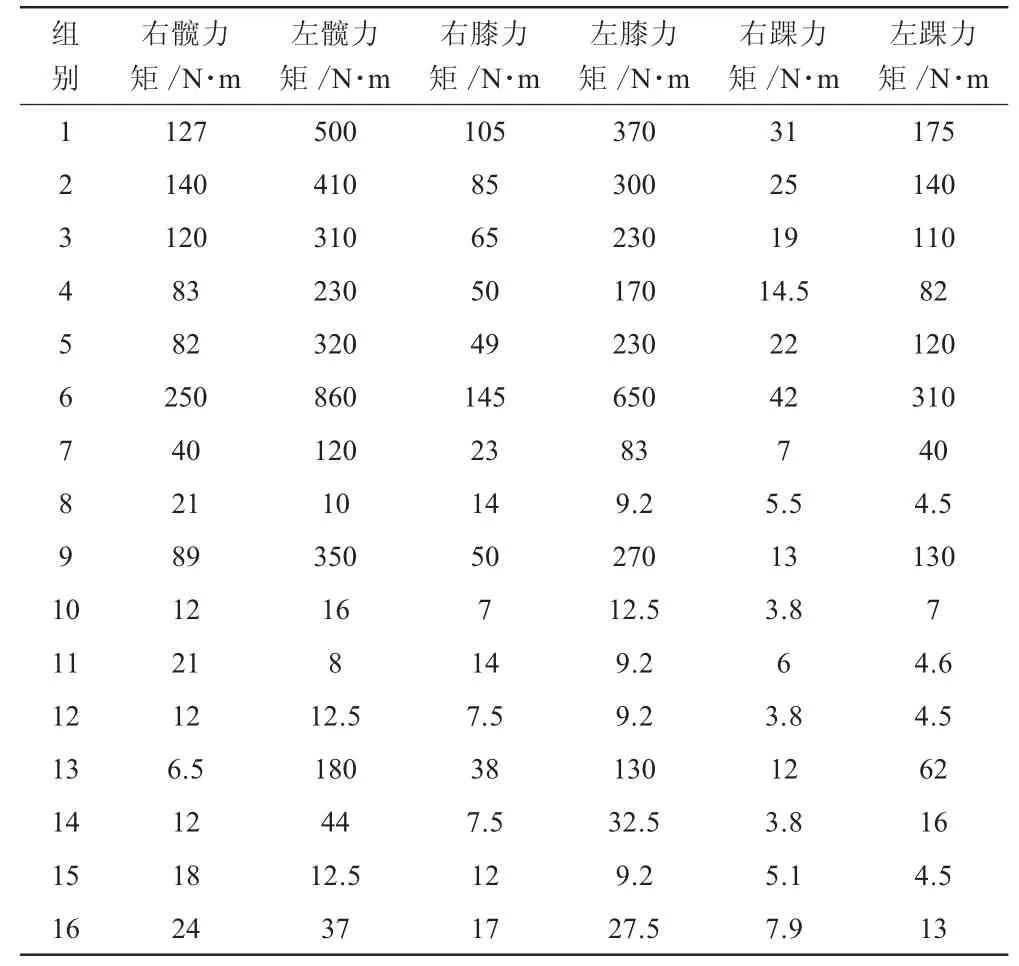
表1 各关节最大驱动力矩表
使用Matlab将表1的数据制成三维曲面图,以便对数据进行分析及得到该机构的最佳弹簧刚度参数。由表1数据可得各关节力矩三维曲面图,如图4所示。
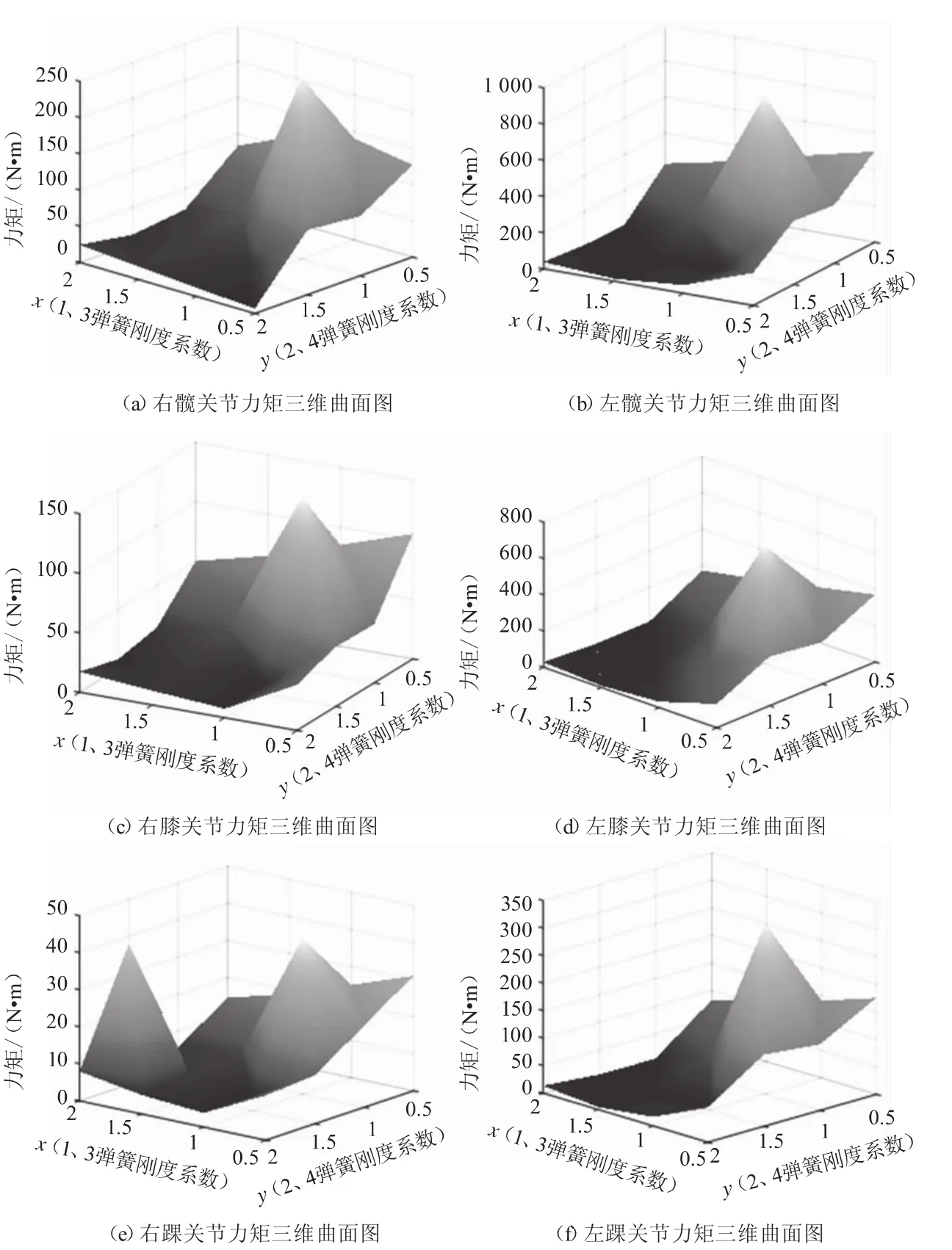
图4 各个关节力矩三维曲面图
5 总结与展望
对髋关节处的储能弹簧刚度参数进行深入研究,得到关于该系统的最佳弹簧刚度参数,是本设计的重心及创新点所在。本文为简化计算,将人体下肢一侧简化为二连杆模型去求解运动学相关问题,但是人体下肢运动机理却十分错综复杂,故而应构建更符合人体下肢运动特征的相关物理模型,这样才能让设计更符合人机工程学的要求,并使康复装置性能更佳。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
中国特种设备安全(2022年2期)2022-07-08
小哥白尼(野生动物)(2021年12期)2021-03-29
西南交通大学学报(2018年6期)2018-12-18
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
山东青年(2016年12期)2017-03-02
大众健康(2016年3期)2016-05-31
中华骨与关节外科杂志(2016年3期)2016-05-17