
基于VR技术的某型舟桥训练模拟器研究
2018-08-26 11:02:08文建祥虞昌君刘宗凯高亚明
机械管理开发 2018年8期
文建祥, 虞昌君, 刘宗凯, 高亚明
(1.中国人民解放军31605部队, 江苏 南京 210007; 2.陆军工程大学, 江苏 南京 210007)
引言
重型舟桥是我军研制的新一代骨干舟桥装备,由于该装备结构组成复杂,实装训练保障人员多、物资消耗大,可实施训练窗口期短,严重影响了操作训练效果,目前部队急需研制该类装备的训练模拟器。本文以Unity 3D引擎为平台设计研制了用于部队训练和教学的重型舟桥训练模拟器。该模拟器既可用于部队的日常训练,也可用于地方预备役部队的训练,以提高我军针对突发自然灾害和国家交通应急抢险救援的交通保障能力。
1 重型舟桥训练模拟器总体设计
1.1 重型舟桥的组成和用途特点
重型舟桥为可变结构舟桥体系,有机地结合了带式舟桥和分置式舟桥的优点,使用时可以根据渡场的具体情况选择合适的渡河方式以及浮桥类型,具有作业的机械化程度高、适应流速大、承载能力强等特点。
该型重型舟桥主要由桥脚动力舟、锚定动力舟、桥跨、运载车、连指挥车等组成。桥脚动力舟的功能是为门桥的水上机动提供动力,同时还给门浮桥提供浮力;锚定动力舟主要用于浮桥架设和分解时投起锚作业与浮桥固定;桥跨是浮桥和漕渡门桥的承重结构,既可作为门浮的桥面,还可为带式桥节门桥提供浮力;运载车是各装载单元的装载平台,具有卸载和装载功能[1]。
1.2 重型舟桥训练模拟器需求分析与方案设计
重开舟桥训练模拟器主要用于模拟装备训练,操纵设备和实装的近似程度与训练的效果正相关。目前,常见的训练模拟器的操纵方式有两种:其一由软件提供虚拟操作界面,进行模拟训练;其二为设计实物操纵设备,通过与仿真计算机通讯进行模拟训练。
综合考量上述两种方式各自优缺点:虚拟操纵界面购置成本低、维护便利,但软件开发成本高,难以模拟实际操作的力感与回馈,拟实性低;实物操纵设备操纵手感优秀,沉浸感强,能够为受训人员提供与实装相近或一致的操纵体验,提高训练效果,但购置与维护成本高于软件虚拟操作界面。为此,综合考虑训练模拟器的实用性和成本因素,训练模拟器拟采用实物操纵设备为主,辅以虚拟操作界面的半实物仿真手段进行设计。
1.3 重型舟桥训练模拟器多训练工位架构分析
训练工位的定义:“训练模拟器人机交互过程中,为一名受训人员提供的交互设备及其布置”。训练模拟器的训练工位设置依据模拟装备的操作实际来确定,一般分为单工位和多工位两种。
鉴于重型舟桥训练模拟器本身的技术特点,电控操作适宜使用半实物仿真方式进行模拟,例如驾驶动力舟、使用移动控制盒操作等内容。而对于手工作业适宜采用软件模拟,例如连接油路、拔插销等内容,可通过实时三维动作的形式进行表现。
模拟动力舟时,宜将主、副驾驶的作业内容通过半实物仿真形式模拟,作业手手工作业内容通过辅训机由指定操作人员在固定的两个工位上轮流操作;模拟运载车时,驾驶员的操作通过半实物仿真形式模拟,作业手作业内容通过软件模拟。即在运载车模式下,只训练驾驶员,动力舟模式下,训练主、副驾驶和作业手。
训练模拟器充分利用自身多监视器、运算能力强的优势,将每辆虚拟运载车独立对应一台屏幕,保证最多可同时训练四名运载车作业手。可保证在最少的装备数量下训练更多的学员[2]。
因此,重型舟桥训练模拟器需设计7个训练工位,即对应7块显示屏和供7人使用的操纵设备。
2 重型舟桥模拟器硬件系统设计
2.1 设计需求分析
根据调研和需求分析,将训练模拟器设计为4个机柜,分别布置相应工位的仿真计算机和操纵设备,如图1所示。
仿真一号机布置1、2号工位,由机柜、仿真计算机、采集设备、供电系统等组成。机柜是安装其他分系统的结构体,外形设计参考该型重型舟桥动力舟驾控台,设备布局与实装相近;仿真二号机布置3、4号工位,由机柜、监视器、采集设备、供电系统等组成;监控机布置7号工位,由机柜、监控计算机、供电系统等组成;辅训机布置5、6号工位,由机柜、监视器设备、采集设备、供电系统等组成。

图1 训练模拟器实装图
2.2 训练模拟器数据采集网设计
基于设计需求,结合某型重型舟桥液压系统、电气控制系统的工作原理、结构组成,共计有10台CAN总线控制设备和260个开关量输入,根据系统需要,制定了分布式结构中重型舟桥训练模拟器的采集方案,使用10块采集设备组成采集网采集(如图2所示),每块采集设备可采集32个开关量和处理两路CAN总线[3]。

图2 数据采集网结构示意图
根据系统工作的环境和训练模拟器的工作特点,训练模拟器面板上所有器件都要模拟原车操控元件,保证操舵手柄、模拟油门等操纵设备尽量与该型重型舟桥实装接近,并且要具有一定的可靠性。根据训练模拟器上的开关、手柄的信号输出类型,对操控台所有输出信号进行采集处理,所有输入量直接通过嵌入式微处理器的多功能I/O口进行采集。嵌入式处理器选用LPC1768,为整个训练模拟器硬件的核心单元,受训人员所有的操作信息通过该处理器处理后,依据通讯协议,编码后通过CAN隔离收发模块转换为CAN总线数据,最后通过CAN总线电缆传送至仿真计算机[4]。
2.3 训练模拟器通信接口模块设计
仿真计算机与训练模拟器之间的通信采用CAN总线,采集系统经电缆将CAN数据传送至仿真计算机,采用PCIE-CAN信号转换模块,将CAN信号转换为PCIE总线信号,以实现控制虚拟训练软件的目的。
为了完成CAN总线传输,需设计CAN总线接口。数据采集模块采用CTM8251ATL模块。该模块是一种高速隔离型CAN收发器,内部集成了电源电路、隔离电路、总线保护等功能。该模块具有DC2500V隔离,ESD和总线过压(CTM1050T)保护功能,电磁辐射低,抗电磁干扰能力强,无需外加其他元件可直接使用以及高低温特性好等特点,符合ISO11898标准,可以和符合ISO11898标准的CAN收发器产品互连。
3 重型舟桥模拟器软件系统开发
3.1 软件架构设计
基于训练模拟器软件系统的需求分析,根据功能要求和Unity 3D开发特点,分为表现、驱动、数据、交互四个层面开展研制,如图3所示。
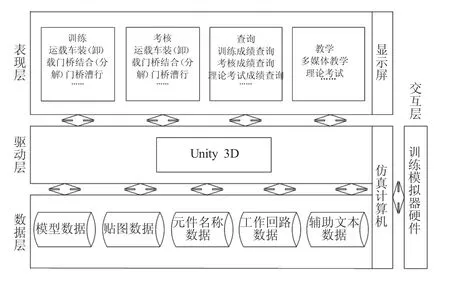
图3 软件系统架构
3.2 模拟训练界面设计与开发
重型舟桥训练模拟器的用户界面的设计如下页图4所示。整个系统软件界面可分为训练模式、考核模式、教学模式和成绩查询四个模块,除成绩查询外的三个模块均含有层级菜单。
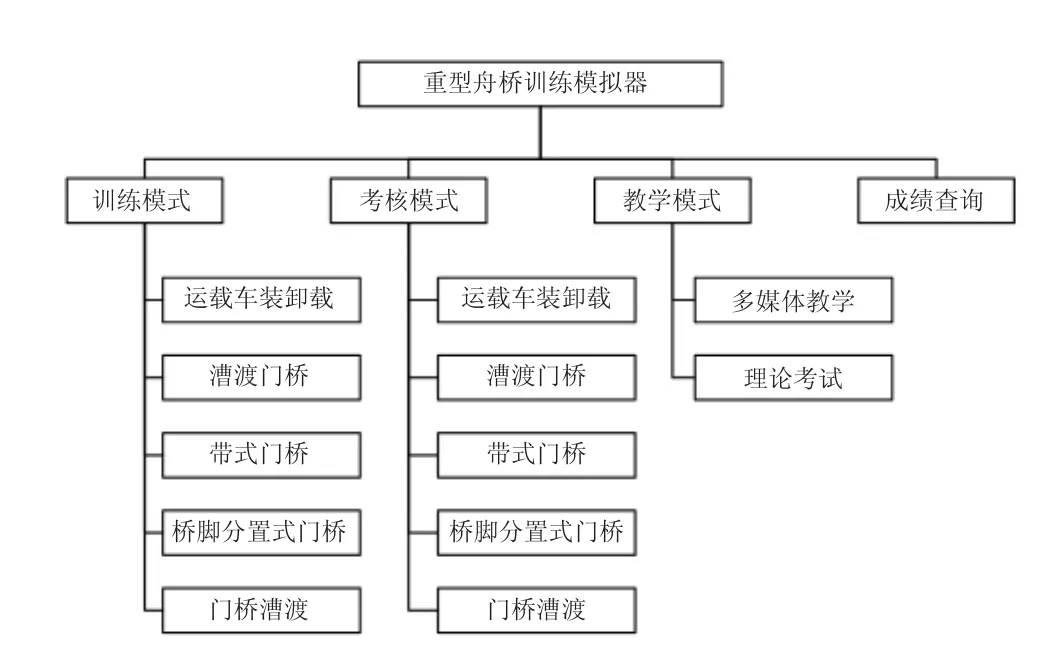
图4 界面整体设计框架图
以三维视景界面为例阐述界面窗口的实现过程。三维视景是界面上用于显示三维场景的窗口。在软件设计中,训练模块用于显示重型舟桥作业动作的窗口[5],如图5所示。该窗口的实现步骤如下:
1)建立一个空白的场景作为三维视景的显示基础,并创建视角。
2)将模型、地形、布景等导入到场景中,调整至合适的位置。
3)切换到视角视图,调节视角范围,使模型的显示处于界面中的合适位置,并且保证其完全显示在UI界面内。运行程序,即可观察到重型舟桥模型在三维视景窗口中的作业演示及驾驶室内场景在三维视景窗口中的演示。
4 结论
1)采用虚拟现实引擎实现了重型舟桥训练模拟器开发。根据重型舟桥组成与功能特点,确定了重型舟桥各机构间的父子层级,优化了配置执行机构的连接关系。

图5 三维视景窗口
2)对重型舟桥作业进行运动分析后,连接配置、层级绑定导入的实体模型,添加驱动、配置训练流程,调用所设计的数据库,从而实现装备作业运动仿真,完成训练模拟任务。
3)采用摄像机跟随及成景原理,连接数据库实现工作回路动态仿真功能。
4)在符合军用软件管理规定的基础上,增加训练模拟器软件的开发性,大幅提升了软件通用性,更好地满足部队模拟训练的需求。
猜你喜欢
中国新闻周刊(2023年42期)2023-12-03 14:39:41
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
物流技术与应用(2020年5期)2020-06-25 02:48:12
意林(2020年10期)2020-06-01 07:26:37
电子测试(2018年4期)2018-05-09 07:28:19
杭州(2015年9期)2015-12-21 02:51:49
装备环境工程(2015年5期)2015-02-28 01:20:24
舰船科学技术(2015年8期)2015-02-27 15:38:41
