
基于ZigBee的高速公路雾区主动诱导系统研究
2018-08-24 07:04:24赵宏伟
山西交通科技 2018年2期
赵宏伟
(山西省交通科学研究院 山西省公路智能监测工程技术研究中心,山西 太原 030006)
0 引言
浓雾对高速公路行车安全构成的危害给人们生命财产和社会经济带来重大损失。目前我国对浓雾天气采取的预防措施较为被动,主要是限制进入高速公路的车辆通行,以增加车辆之间的距离,减少事故的发生。这种方法的缺点是不能全线控制车辆,无法显示前方车辆的距离,只能依靠司机来估计距离前方车辆的距离。虽然在入口处拉大车距,但随着时间的推移,由于各车车速不一致,极易造成车辆追尾事故发生。另外,在能见度低于50 m时,采取封道的措施,将导致车辆改道,增加国省道路压力,导致地方道路拥堵[1]。
同时,由于高速公路的通行能力大大降低,使得建设成本较高的高速公路无法达到预期效益。与此同时,收费广场和路边停放的大量车辆,不仅给收费站和道路的安全管理带来巨大压力,而且也会带来一定的社会负面影响。
根据调查,我国的相关科研院所一直在研究公路雾区的交通诱导和监测预警的研究。目前的解决方案是在道路两侧每隔一定距离设置带有黄色LED诱导灯的被动式诱导装置。车辆驶入雾区以后,虽然可以有效地提示司机进入雾区,提醒司机提高警惕,但是由于浓雾影响造成的低能见度,使得司机无法估计前方车辆的距离,盲目跟进很容易造成车辆追尾事故发生。
雾区主动诱导系统采用分布式控制技术对交通和道路气象环境进行监控,以入侵探测技术为基础自动识别驶入雾区检测范围的车辆,实现低能见度环境下的道路智能引导、动态尾迹跟踪预警等功能,可以降低交通事故的发生率。
1 系统组成
高速公路雾区主动诱导系统是由多种监控设备、技术和控制软件构成。一般采取动态节点探测器对驶入雾区的车辆作为移动物体进行连续检测,控制道路两侧轮廓指示标,对处于雾区行驶的车辆实行诱导,从而保障在不封道的情况下车辆正常行驶。
高速公路雾区主动诱导系统分为气象环境检测子系统、视频监控子系统、车辆检测子系统、控制中心子系统、信息发布5套子系统和1套综合监控软件。高速公路雾区主动发光诱导系统示意如图1所示。
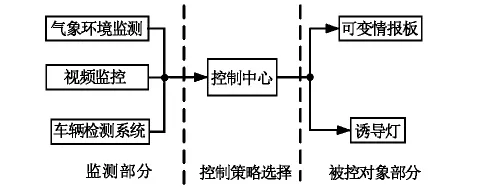
图1 高速公路雾区主动诱导系统
其中,气象环境监测系统能够精确、及时地监测道路环境状况,实现对大雾的实时监测与预报。视频监控系统为管理员提供现场车辆行驶情况和雾区道路交通状况的实时图像信息,对发生异常状况的区域实施视频监控,并且能够与车辆检测系统相结合。控制中心根据接收到的监测数据选择合适的控制策略,选择不同的管理方案,开启现场引导系统,并通过一些多功能轮廓指示标发布动态预警信息给司机,提供本车或前方车辆的通行信息,提醒司机减速慢行,进而有效避免雾区追尾事故。
2 基于ZigBee的雾区主动发光诱导系统
2.1 ZigBee无线网络
ZigBee技术是一种短距离、低功耗、低成本的无线通讯技术。每一个ZigBee网络节点可在自己信号覆盖的范围内,和多个不承担网络信息中转任务的孤立子节点无线连接。每个ZigBee网络节点可以支持最多31个传感器和受控设备,每个传感器和受控设备可以有8种不同的接口方式,可以采集和传输数字量和模拟量。整个ZigBee网络不仅可以“无限”扩展开来,而且还可以与现有的其他各种网络连接[2]。因此ZigBee技术是未来近距离通信技术的发展方向。
2.2 基于ZigBee的主动发光诱导系统总体结构设计
本系统采用静态树状组网结构,在道路两侧均匀铺设振动传感器、磁传感器等作为树状网络的终端叶子节点,路由节点接受叶子节点入网和通过传感器采集监测到的车辆信息,然后将监测到的信息通过无线信号实时发送到临近的路由器节点,并通过路由器节点转发到无线网络的中心节点协调器上。协调器为全功能网络节点,具备协调器的能力,主要作用是组建一个网络、接受路由节点和叶子节点入网[3],接收路由节点和叶子节点发送来的数据并处理数据。网络协调器将收集到的信息通过打包处理,采用GPRS网络远程传输到控制中心的信号处理主机,最终完成整个系统的信息采集。组网方式如图2所示。
2.3 车辆检测系统设计
车辆检测子系统是整个网络化的主动诱导系统的核心,承担数据采集的主要工作。工作过程如下:终端节点采集检测范围内的地球磁场扰动信号,并实时处理,得到车辆信息。然后将车辆的状态、时间值等信息通过无线通讯的方式发送给信号处理主机。信号处理主机实时计算接收到的终端节点发送来的车辆信息后,将这些信息结合控制中心发来的控制策略,为整个系统调整相应的控制策略提供依据。信号传输流程如图3所示。
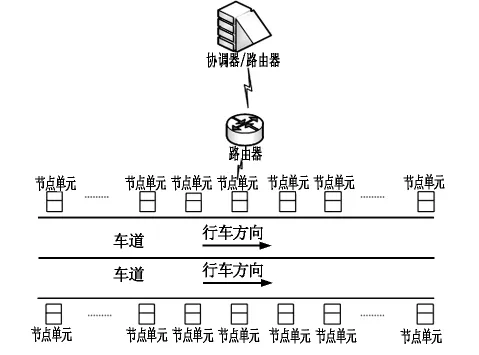
图2 系统的静态组网方式
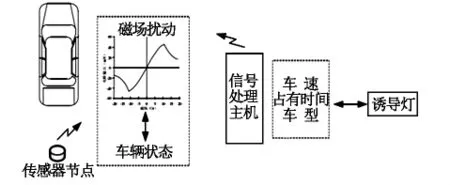
图3 车辆检测系统信号传输流程示意图
车辆的铁物质会导致磁传感器的磁场变化,传感器内的磁场变化经过模数转换最终以电压值的形式显示出来。因此,我们可以通过检测磁传感器输出的电压波形来判断车辆的行驶方向。
当车辆进入磁传感器的磁场检测区域时,磁力线受到车辆的铁磁物质的影响,从偏向车辆的一侧检测到一个较弱的磁场,随着车辆的靠近,磁场越来越强,输出的电压值由偏向负方向,恢复并偏向正方向;当车辆沿着相反方向行驶时情况与此相反[4]。
通过磁阻传感器可以很方便地测算出车辆速度,具体实施如下:在道路两侧安装两个磁阻传感器节点1和2,相互距离为L,采样周期时间同步。为了保证两个磁阻传感器对车辆的感测是相同的,两个磁阻传感器的磁轴方向与车辆的行驶方向一致,车辆行驶过距离路程所需的时间,就是两个节点感测到的车辆信息的时间差,因此可通过车辆行驶所需的时间和车辆驶过路程,并根据一定的算法测算出车辆的行驶速度。
2.4 上位机软件及控制策略设计
终端传感器节点作为现场数据采集终端设备,确保数据的可靠性和有效性,然后根据采集的波形曲线选择合适的算法从中提取出车辆状态信息。将这些参数信息与控制中心预先设定的控制策略相比较,发出保持车距、超速警报等控制信号,系统软件功能如图4所示。

图4 系统软件功能图
终端传感器节点将监测到的数据经过模数转换为电压信号,然后通过ZigBee无线通信网络发送到信号处理主机。经过一定的滤除杂波和消除杂音处理后,将接收到的数据包拆解,进而对数据进行识别处理,并提取有用信息。信号处理流程如图5所示。
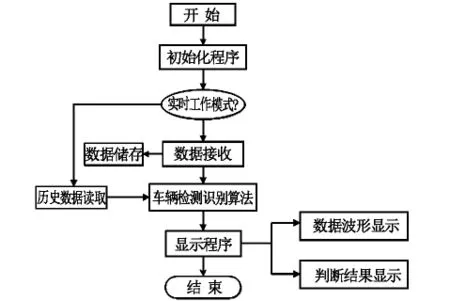
图5 信号处理流程
上位机软件平台根据数据和判断结果进行远程设备监控,通过设置控制策略和控制参数进行实现定制化控制,控制策略如下:
a)诱导模式 适用于天气晴朗、能见度在200~500 m的环境下,主动发光诱导标志(黄灯)按中等频率同步闪烁。
b)预警模式 适用于雾/雨/雪天气、能见度在100~200 m的环境,主动发光诱导标志(黄灯)按高频率同步闪烁提供行车主动诱导。
c)雾霾模式 适用于雾霾天气、能见度在50~100 m的环境,主动发光诱导标志(黄灯)按高频率最高亮度透雾同步闪烁提供行车主动诱导,当车辆经过后,其后面3组(默认)预警灯(红灯)也按高频率最高亮度透雾同步闪烁,给后面车辆提供前方有车信号,使其保持车辆的安全行车间距,减少追尾事故发生[5]。
3 结论
本文简要阐述了基于ZigBee的雾区主动发光诱导系统的组网方式,在此基础上介绍了车辆检测系统,包括车辆行驶方向的判别检测和车速估计方法,并对上位机软件系统的系统功能和信号处理流程进行了详细介绍,最后提出了雾区主动诱导系统的控制策略。应用效果表明,本系统可有效降低交通事故的发生率,保障大雾天气下的行车安全。
猜你喜欢
数学物理学报(2021年4期)2021-08-30 08:27:48
能源工程(2020年6期)2021-01-26 00:55:22
新世纪智能(数学备考)(2020年10期)2021-01-04 00:37:50
山东冶金(2019年3期)2019-07-10 00:54:04
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
消费导刊(2018年10期)2018-08-20 02:57:02
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
中成药(2017年12期)2018-01-19 02:06:52
