
基于副边半控整流的超级电容无线充电系统研究
2018-08-23 01:24李巍
电气传动自动化 2018年5期
李 巍
(中国铝业股份有限公司连城分公司,甘肃连城730335)
1 引言
无线充电系统具备自动化充电,强环境适应性和便捷性,能够广泛的应用于电动车,便携式设备和AGV 等以电池或超级电容为动力源的设备中[1]-[3]。以超级电容为例,为实现快速且高效的电能补充,往往需要恒流充电[4]-[5]。因此,有必要研究具备恒流充电能力的无线充电系统。本文设计一套基于副边半控整流桥的恒流充电系统,通过PI算法调节半控整流桥的移相角度,控制充电电流。
2 电路结构与理论分析
2.1 电路结构分析
如图1所示,本文提出的无线充电系统主要包括直流源,全桥逆变器(由四个MOSFET管S1~S4构成),磁耦合机构(由发射线圈L1,内阻为R1和接收线圈L2,内阻为R2构成),串串补偿结构(由原边补偿电容C1和副边补偿电容C2),半控整流桥(由两个MOSFET管Q1和Q2以及两个二极管D1和D2构成),容性滤波(由薄膜电容Co构成)和超级电容(等效电路模型为串联电阻Rs,理想电容C和等效并联电阻Rs)。
霍尔电流传感器1实时采集副边谐振线圈中电流i2(t),用于同步副边控制的PWM驱动信号。霍尔电流传感器2实时采集直流输出电流Io,通过PI算法控制半控整流桥,实现超级电容的恒流充电。
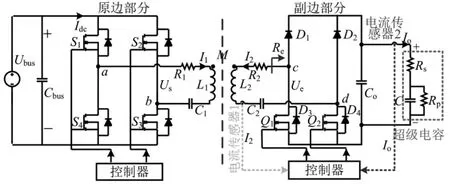
图1 电路结构框图
2.2 半控整流桥分析
如图2所示,相较于无线充电系统副边控制中常用的Buck变换器而言,半控整流桥节省一个功率电容和薄膜电容,从而能够有效地减小副边成本、重量与体积。
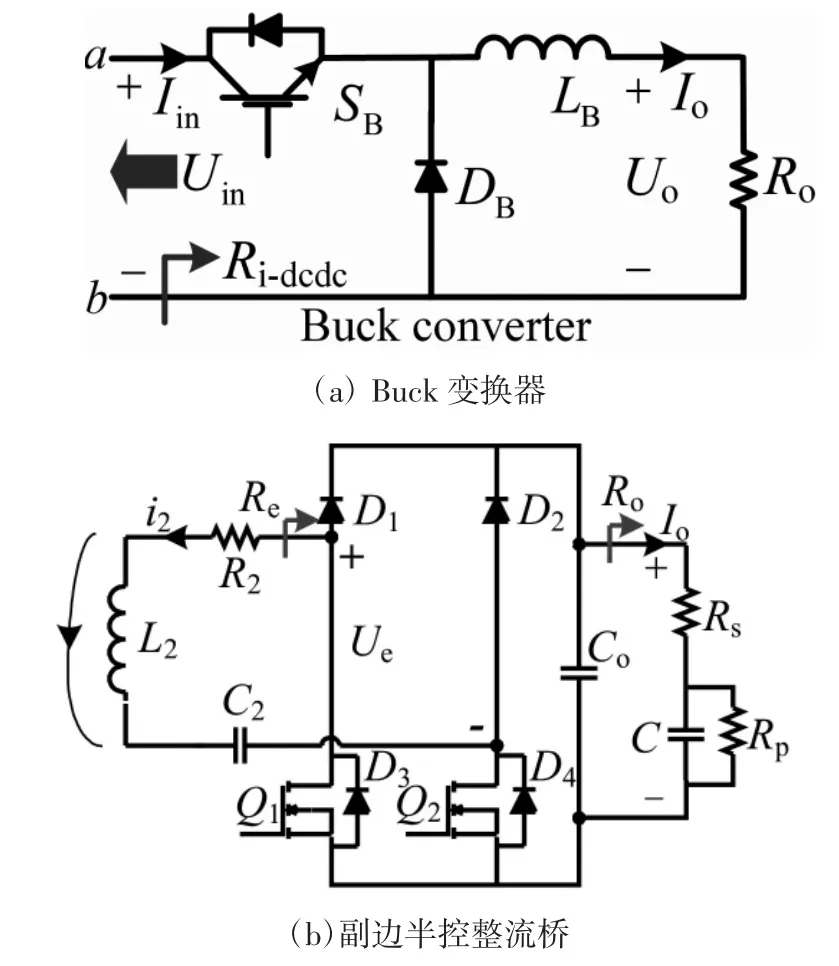
图2 副边用恒流充电控制电路
为简化分析,假定半控整流中的二极管和MOSFET损耗均可忽略不计;同时,滤波电容足够大能够维持恒定的输出电压。半控整流桥的工作波形如图3所示,其中,i2为副边谐振电流,ue为半控整流桥的输入电压,ue_FHA为ue的基波分量,PWM_1和PWM_2为MOSFET的驱动信号。
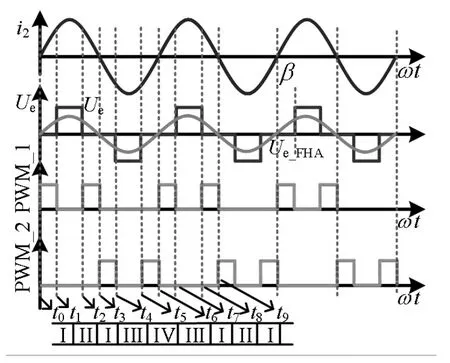
图3 副边半控整流桥的工作波形
分析图3中波形可知:i2与ue的相位同步,从而Re为纯阻性,保证副边半控整流桥的高效率工作,其相应的控制电路如图4所示。
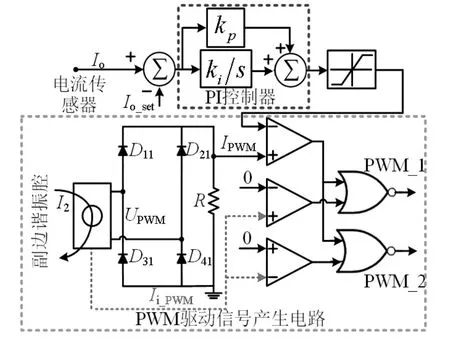
图4 副边半控整流桥的PWM驱动信号
根据图3中工作波形,将半控整流桥的工作模式概括为表1。
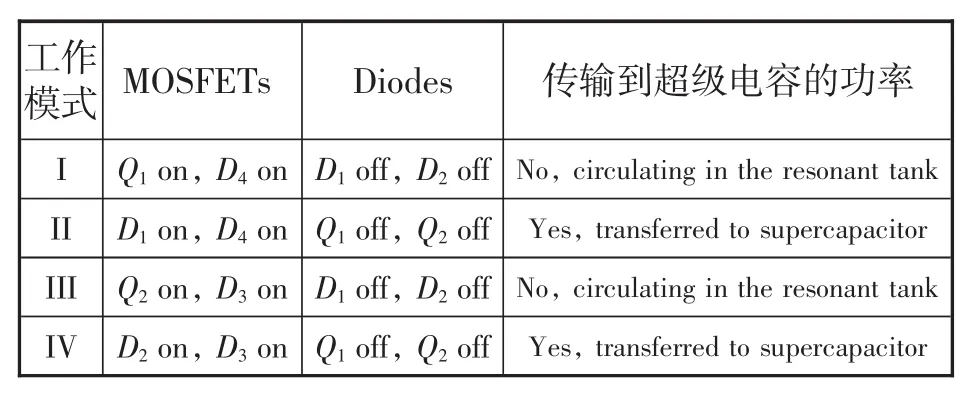
表1 半控整流桥的工作模式
在一个工作周期内,ue的状态有三种,表达式为

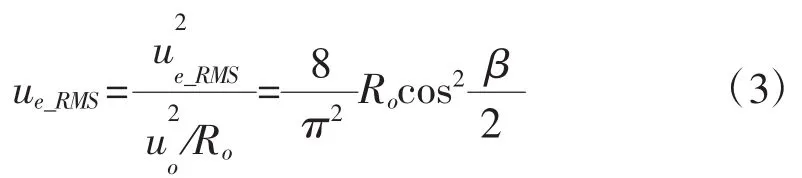
其中,β是移相角度,Uo是超级电容的端电压。基于基波分量分析法,ue的有效值为

由式(12)可知,通过调节β,即可实现ue的调节,从而控制传输到超级电容的功率。根据功率平衡方程,ue推导为
2.3 充电电流分析
如图1所示,根据互感电路模型和基尔霍夫电压定律(KVL),并且假定发射线圈和接收线圈均处于谐振状态,即(ω1和ω2为发射线圈和接收线圈的谐振频率),充电电流Io的表达式为
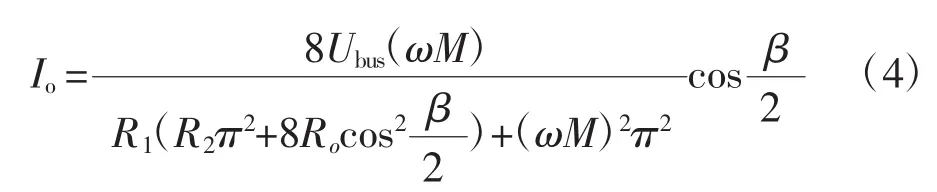
由式(4)可知,Io是β和Ro的函数。当Ro变化时,通过调节β能够控制充电电流的恒定。为直观的分析式(4),采用 Simulink 仿真给出 Io与 β、Ro之间关系,仿真用参数与实验系统参数一致,如表2所示。
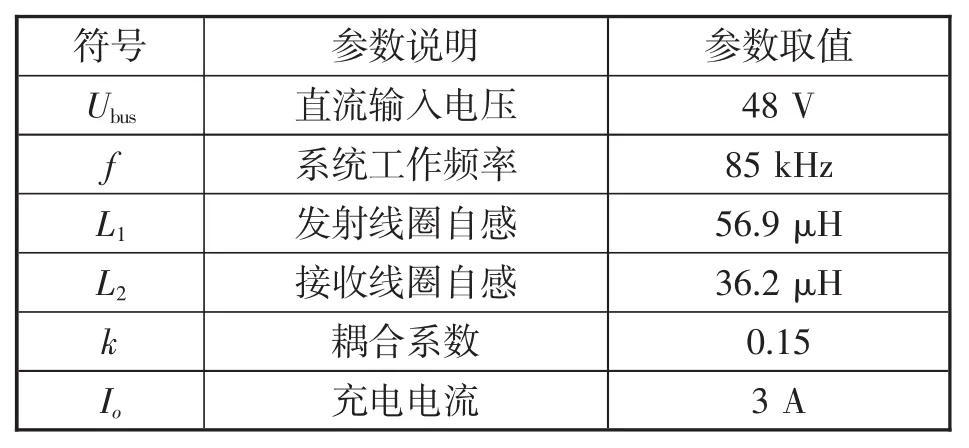
表2 系统参数
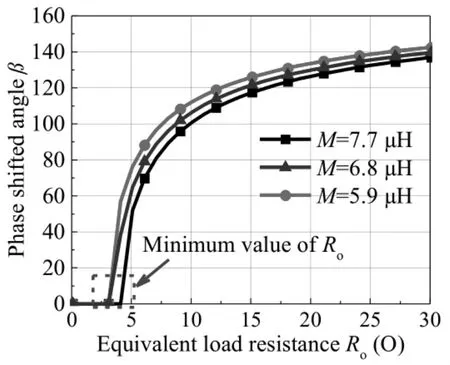
图5 充电电流仿真分析结果
由图5可知,对于不同的互感值M,当Ro变化时,通过调节β能够控制充电电流。
3 Simulink闭环仿真分析
闭环仿真结果如图6所示。根据图4中的控制电路,当Ro变化时,通过PI算法调节β实现超级电容的充电电流恒定,从而验证基于副边半控整流桥的恒流控制策略的可行性。
4 实验验证与结果分析
4.1 实验装置
如图6所示,系统实验装置主要包括原边控制器(用于产生驱动全桥逆变的四路PWM信号),全桥逆变,串传补偿电容,磁耦合机构,副边半控整流桥,控制器(用于产生半控整流桥的两路PWM信号)和超级电容等。霍尔电流传感器采集副边谐振线圈电流和直流充电电流。
4.2 实验验证
副边半控整流桥的工作波形如图7所示,实验波形由泰克示波器MDO3045B测得。由图7(a)可知,半控整流桥的输入电压和输入电流同相位,与前述理论分析一致。由图7(b)可知,在40s的时间内,充电电流为 3.01A,超级电容电压由 10.1V 增加至 22.4V。
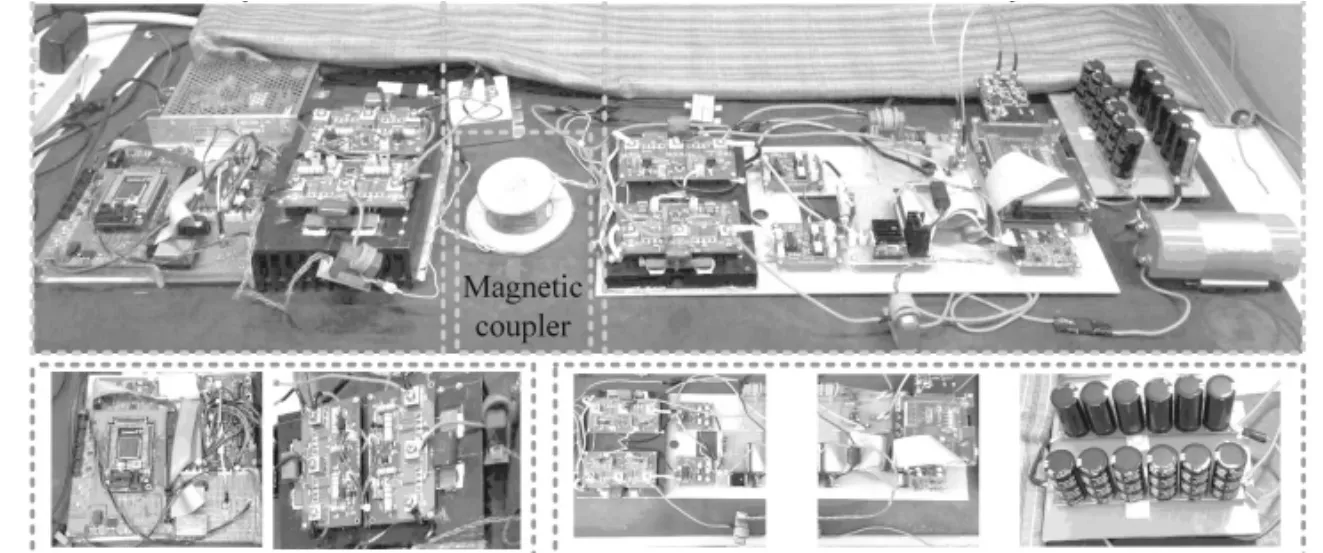
图6 系统实验装置
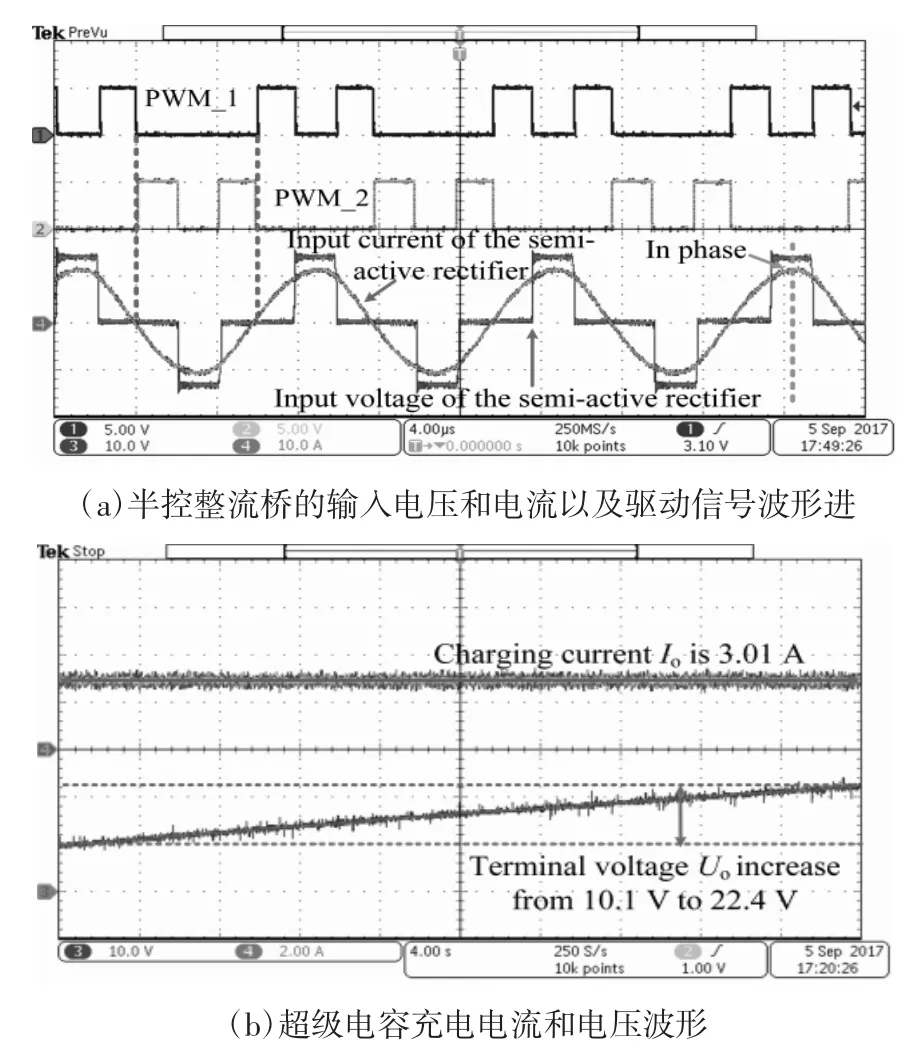
图7 半控整流桥的实验波形
如图8所示,互感值变化时,系统依旧能够实现超级电容的3 A恒流充电。
5 结束语
本文设计一套超级电容的恒流无线充电系统,基于副边半控整流桥,通过PI算法控制移相角度,实现超级电容的3 A恒流充电。

图8 互感值动态变化时,恒流充电的实验波形
猜你喜欢
中国新通信(2020年1期)2020-05-25
科技传播(2019年14期)2019-09-16
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
电子制作(2018年17期)2018-09-28
电脑知识与技术(2016年24期)2016-11-14
广西电力(2016年5期)2016-07-10
中国高新技术企业(2015年14期)2015-04-29
电测与仪表(2015年21期)2015-04-09
电子设计工程(2015年6期)2015-02-27
