地铁接触网缺陷检测中的多重融合定位技术
2018-08-20 06:10:28李永光王熙楠宗立明房金萍
城市轨道交通研究 2018年8期
李永光 吴 宽 王熙楠 宗立明 房金萍
(北京神州同正科技有限公司,100083,北京//第一作者,工程师)
近年来,随着我国城市轨道交通的运营环境越来越复杂多变,国家“十三五”重点研发计划中提出了城市轨道系统安全保障技术研发课题。该课题研究系统运营环境状态感知、评估与预警、系统解耦与安全综合保障等技术,研发包括列车、客流、运营设施设备及基础设施在内的检测、监测系统与装备,其中针对受电弓与接触网等基础设施的检测是该课题的一个重点内容。
列车的受电弓与接触网作为必要的供电基础设施,容易在运行过程中发生各种故障,一旦有任何的轻微损伤,若没能及时发现,很容易产生弓网事故,后果十分严重。为了监测弓网运行状态,目前有多种检测设备安装在专用检测车和运营列车上。而针对检测到的缺陷数据的位置定位,则是通过车载列控系统或轴端编码器获取的。由于列控系统的数据接口开放限制,轴端编码器误差比较大。为此,本文提出了独立于车载列控系统的,基于多普勒雷达、激光测距传感器及无线射频(RFID)的多重融合定位技术。
1 多普勒雷达技术
利用列车车底雷达内置天线,接收物体移动状态信号的检测是采用基于多普勒效应的微波探测技术来实现的,其产生的发射波频率及微波振幅会随物体移动发生相应的改变。基于此原理,可以通过雷达所捕捉到的速度数据,测出相对方向运动物体的行进速度,并且可以测出运行过程中所产生的发射波与接收波之间产生的多普勒频率fd,其表达式为
式中:
fc——雷达工作频率;
v——列车速度;
c——光速;
α——天线辐射角度。
通过对列车在整条线路行驶中生成的回波信号进行精准谱分析,可得fd值,代入式(1),得到行驶距离D为
式中:
T——测速周期;

vi——iT时刻的列车速度。
2 激光测距技术
激光三角测距法采用由物面、光源及接收元件所构成的三角光路进行测距,光源一般采用激光二级管,其原理如图1所示。光源和接收元件统一放置在一个探测模块里。探测模块主要由光源、微处理器、信号检测电路、镜头、接收元件等7部分构成。镜头及接收元件接收到反射光源后,由微处理器内部完成整流、滤波、转换及信号放大。在此过程中,发生的反射最终被接收镜头的接收元件接收。根据几何原理,可以测得接收元件到被测物的距离以及光束到达接收元件的角度。

图1 激光三角法测距原理图
3 RFID技术
RFID技术作为一种非接触式的自动识别技术,可工作于各种恶劣环境,其设备由标签、阅读器和天线3部分组成。标签主要安装于出入站,天线安装于列车车底。当装有天线的列车出入站时,随着列车的行进,完成扫描标签动作,记录当前车站信息,与检测数据进行匹配,其工作原理如图2所示。


图2 RFID技术原理图
4 多重融合定位技术
安装于列车上的弓网缺陷定位设备由测速雷达、激光测距传感器及RFID等模块构成,是一种全新的多重融合定位技术,如图3和图4所示。

图3 多重融合定位技术结构图

图4 多重融合定位模块安装位置
列车运行时,测速雷达实时测量当前运行速度,并配合智能累积算法,计算当前里程;激光测距传感器探测接触网门庭结构位置,与速度和里程信息相匹配,配合RFID模块采集到的站点信息,可以实现弓网缺陷的精准定位。
4.1 测速雷达
测速雷达安装于列车底部,结合多普勒技术,在列车运行时实时测量列车行进速度(见图5)。 测速雷达技术指标参数如表1所示。

图5 测速雷达工作示意图表1 测速雷达技术指标

技术指标指标值工作频率/GHz24.15测速范围/(km/h)(2±1)~(400±1)测速精度/(km/h)(2±1)~(400±1)工作温度/℃-40~70
4.2 激光测距传感器
激光测距传感器模块安装在车顶(见图6),采用光学三角测量法定位物体。其测量精度达到1 mm,测量频率达到3 kHz,满足列车140 km/h运行速度状况,不会产生漏检,探测准确率达到100%。同一接触网支柱(或吊柱)抓拍的当前位置与历史定位抓拍的误差不大于5 mm。激光传感器的激光脉冲稳定且集中,不受环境光线影响。激光测距传感器技术指示参数如表2所示。

图6 激光测距传感器安装位置表2 激光测距传感器技术指标
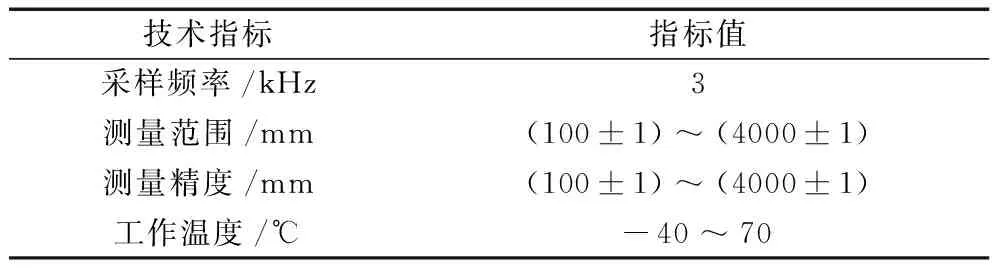
技术指标指标值采样频率/kHz3 测量范围/mm(100±1)~(4000±1)测量精度/mm(100±1)~(4000±1)工作温度/℃-40~70
4.3 RFID模块与天线
RFID模块采用工业级高速标签模块,安装于列车出入站隧道侧壁,RFID天线安装于列车车底侧部。当装有天线的列车出入站时,RFID模块扫描标签,记录当前车站信息,与检测数据进行匹配(见图7)。RFID主要技术参数如表3所示。

图7 RFID模块工作示意图表3 RFID技术指标

技术指标指标值频率范围/MHz902~928 增益/dBi8 波瓣宽度E-Plane 72°,H-Plane 77°驻 波 比≤1.5极化方式右旋圆极化最大功率/W6 输入阻抗/Ω50 抗风强度/(km/h)216 接头TNC
5 多重融合定位技术测例
本文结合软件智能算法,配合多重融合定位模块,选择一段公路区间,模拟列车在站点区间的运行状况,对多重融合定位技术进行测试。
测试中,融合定位软件显示了每个接触网门庭结构的位置信息(里程、速度、站点区间),与历史记录对比,并将相关信息提供给接触网检测设备后台程序,为缺陷定位提供准确的位置信息(见图8)。
激光测距传感器在不同车速下探测接触网门庭结构距离的显示页面如图9所示。在公路两侧布置RFID模块,每个RFID内部存储有当前位置里程。当装有测速雷达的汽车通过时,数据采集设备对数据进行实时采集,并对瞬时里程进行实时对比分析和修正(见图10)。
通过里程修正和定位点的信息,融合定位系统可以实时精准测量弓网检测系统中的位置信息,为故障缺陷提供准确的依据。通过测试结果可以看出,里程修正距离较为准确,变化量最大为0.81 m,平均为0.35 m。

图9 接触网门庭结构定位点信息页面

图10 测例中的里程修正页面
6 结语
采用基于RFID、多普勒雷达和激光测距融合的多重定位融合技术,是在现有定位技术基础上的改进和创新,可以提高定位精度和准确性,能够更加精准地定位地铁列车和接触网悬挂位置,进而准确定位接触网缺陷点位置。该技术定位精度达到400 mm以内,且不依赖于车载列控系统。与传统的单一定位方式相比,该技术可针对获取到的位置信息进行多重判断与计算,能及时纠正位置信息,利于检修人员及时准确定位故障点。
猜你喜欢
云南画报(2021年10期)2021-11-24 01:06:38
小哥白尼(趣味科学)(2021年4期)2021-07-28 02:23:50
云南画报(2021年4期)2021-07-22 06:17:10
小学生学习指导(低年级)(2019年6期)2019-07-22 03:32:48
测控技术(2018年6期)2018-11-25 09:50:24
通信电源技术(2018年5期)2018-08-23 01:16:04
上海铁道增刊(2017年3期)2018-01-22 03:01:24
制导与引信(2017年3期)2017-11-02 05:17:00
西南交通大学学报(2016年3期)2016-06-15 20:29:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:37