DELTA并联机器人路径规划设计
2018-08-20 02:20陈红亮孔宇超
浙江水利水电学院学报 2018年4期
陈红亮,孔宇超
(浙江水利水电与汽车工程学院 机械学院,浙江 杭州 310018)
在机器人技术的应用与研究中,路径规划问题是一个重要研究内容之一.[1-2]机器人在执行实际工作过程中,其运动起点和运动终点之间不可避免地需要绕开或避免干涉位置、障碍物和奇异位置点等区域,所以机器人路径规划问题也相对比较复杂[3-6].国内外许多学者对最优时间轨迹规划进行了深入研究,大多采用三次多项式、高阶多项式及B样条曲线等方法在操作空间或关节空间对机器人进行轨迹规划,得到了速度、加速度及转矩连续的运行曲线,保证了机器人运行的稳定性,减少了对机械的刚性冲击[3-6].不过这些方法需要大量的计算和计算机编程.本文借助ADAMS软件,以最为成功应用于工业领域的并联机构之一DELTA并联机器人为例,对其进行运动学的正解和逆解求解,并规划其工作路径.
1 DELTA并联机器人结构
并联机器人由动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构.其特点为无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好[3-4].
本文研究的DELTA并联机器人结构示意图(见图1),其组成为动平台A,三组上连杆AiBi,三组下连杆BiCi(i=1~3)和定平台C组成,其自由度为3.其三维示意图(见图2).
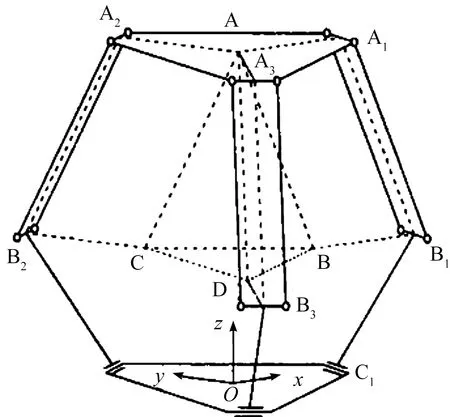
图1 DELTA并联机器人示意图

图2 DELTA并联机器人三维模型图
那么连杆A1B1、A2B2、A3B3分别沿A1A,A2A,A3A平移,并交于运动平台中心A.当3个输入杆输入角度给定,动平台的位置可以由式(1)求得[7].
i=1,2,3
(1)
式中:r1—运动平台铰链点所在圆半径;
φ—运动平台铰链点分布角.
用这种方法求解需要大量编程和复杂数值计算,本文采用ADAMS软件求解.
2 基于ADAMS软件DELTA并联机器人正解
所谓机器人的正解,是给定机器人各关节的角度、位移等,计算出机器人末端的空间位置和姿态.对于并联机器人而言,其位置正解计算过程中需要求解多元高度耦合的非线性方程,因此相对比较困难.
ADAMS是虚拟样机分析的应用软件,用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析[8-11].
作者采用ADAMS软件分析DELTA并联机器人的末端位置.将DELTA并联机器人导入ADAMS软件,添加约束和驱动,在定平台C处,三个主动副的驱动分别为30×sin(180×time),30×sin(180×time-120),30×sin(180×time+120),驱动角度单位为度,在软件中仿真运行时间是2 s,测得动平台位移(见图3,图4).

图3 动平台X方向和Y方向的位移变化曲线
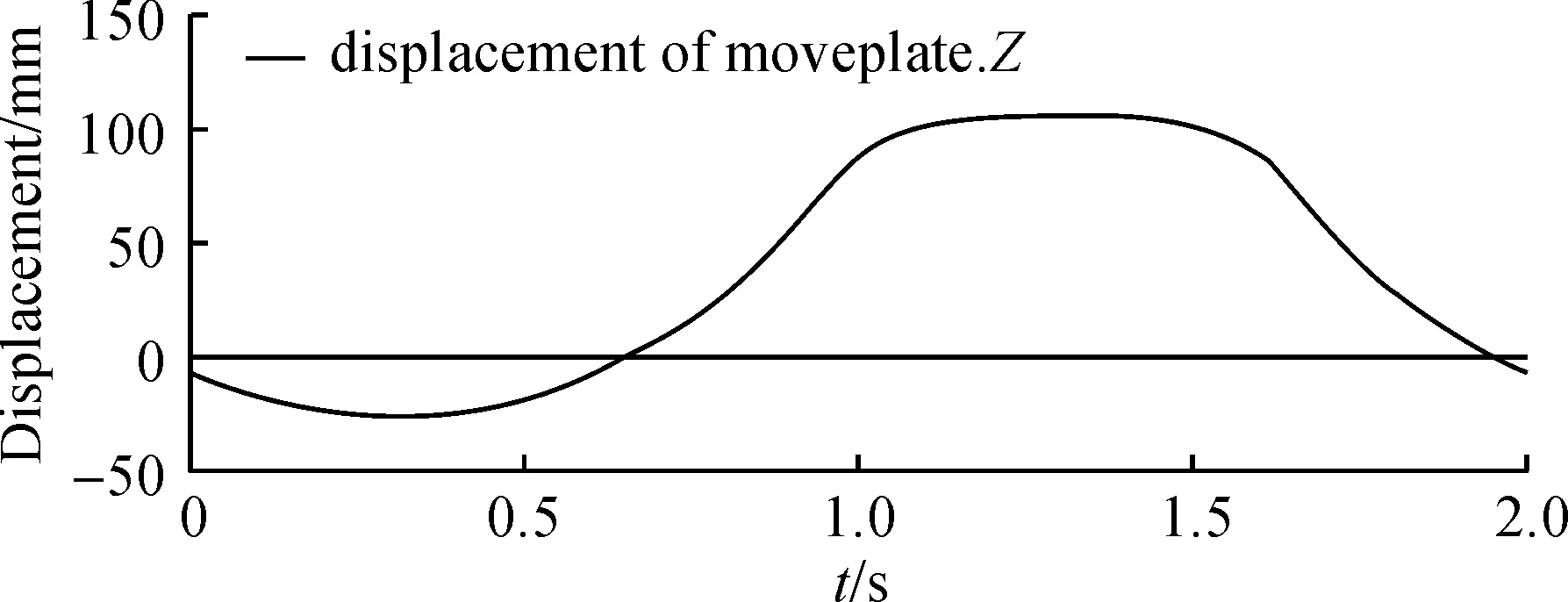
图4 动平台方向的位移变化曲线
3 基于ADAMS软件DELTA并联机器人运动轨迹规划
将机器人末端操作手避开障碍的各点连接起来,构成机器人末端操作手运动轨迹.已知机器人末端位置,求解机器人各关节角度和位移,称之为机器人逆解.运动轨迹规划也就是求解机器人位置逆解.
ADAMS软件的点驱动功能[7-8],可以在机器人末端操作手实现6个自由度分别定义其运动轨迹,仿真时自动合成运动,此时在主动副上建立测试函数,仿真结束后,将测试函数转化为样条曲线导出;然后将样条曲线添加到主动副的驱动上,并取消点驱动功能,再进行仿真,可以复现点驱动机器人末端操作手运动轨迹,从而实现机器人轨迹规划.
不失一般性,本文设计了DELTA机器人末端操作手运动轨迹(见图5),那么机器人末端操作手中坐标系中各个运动规划方向为:
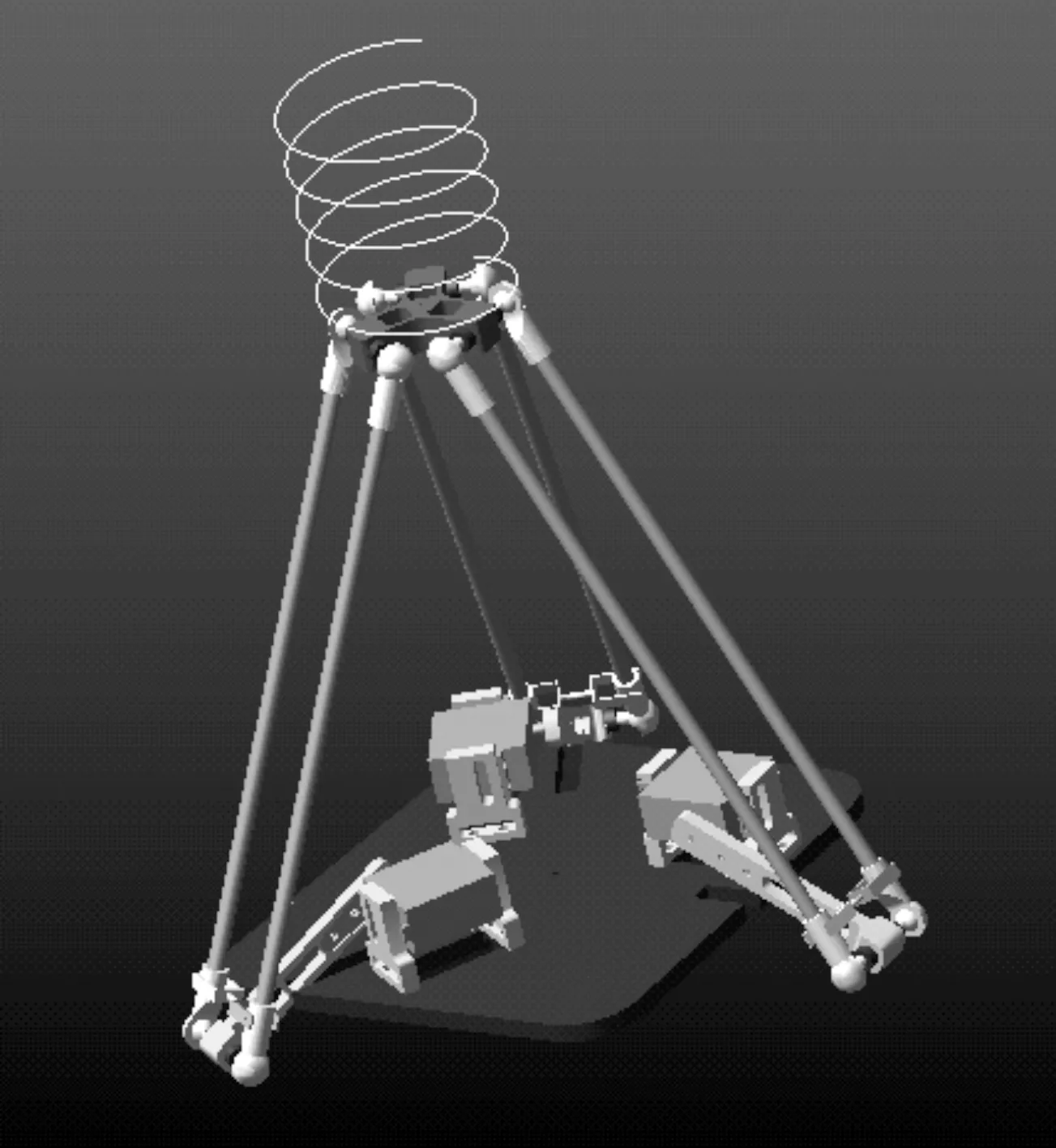
图5 机器人末端操作手运动轨迹
X方向:40×cos(2×180d×time)
Y方向:40×sin(2×180d×time)
Z方向:-20×time
在DELTA机器人的主动副上添加测试函数,仿真运行机器人模型,可以求得其主动副的运动轨迹(见图6).将图6曲线上导出为表格形式,如何分别以样条曲线插值方式添加到主动副驱动上,并屏蔽末端操作手的点驱动,再仿真运行机器人,结果实现机器人轨迹规划.
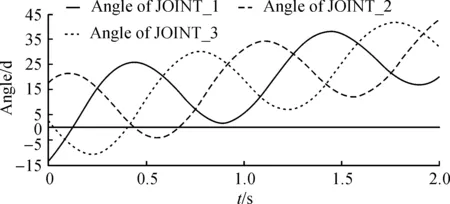
图6 主动副的运动轨迹
4 结 语
本文采用ADAMS软件仿真求解DELTA机器人的运动学正解和逆解,并将其逆解导出数值解,将数值解转化为样条曲线,并将该曲线添加到主动副的驱动上,可以实现机器人运动轨迹规划.该方法不需要大量编程就易于实现机器人的运动轨迹规划,从而可以加快机器人研发进度.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
图学学报(2020年5期)2020-11-13
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年23期)2019-02-23
现代装饰(2018年5期)2018-05-26
消费导刊(2018年8期)2018-05-25
制造技术与机床(2017年7期)2018-01-19
软件(2017年6期)2017-09-23
中国三峡(2017年2期)2017-06-09