
一种铠装缆绞车控制系统设计与研究
2018-08-14 06:18:52石晓妹李洪聪蒋恒深陈黎明
船电技术 2018年7期
丁 平,石晓妹,李洪聪,蒋恒深,陈黎明
一种铠装缆绞车控制系统设计与研究
丁 平1,石晓妹2,李洪聪1,蒋恒深1,陈黎明1
(1.无锡德林防务装备股份有限公司,江苏无锡 214191;2.徐州徐工挖掘机械有限公司,江苏徐州 221000)
针对现有铠装缆绞车缆绳拉力容易受外界因素干扰,导致控制精度不高,尤其在拉力临界值时,由于拉力的跳变导致张力保护模式和正常模式来回切换等问题。研究提出了铠装缆绞车控制系统工作流程的优化,对拉力信号进行四阶滤波处理。详细介绍了绞车控制系统的硬件设计、软件设计和关键技术处理。同时对绞车系统进行智能化故障监控,达到智能故障诊断的目的。
铠装缆绞车 四阶滤波 张力保护 智能化
0 引言
随着潜艇数量的不断增加,潜艇在巡航过程中出现事故情况也会随之增加,这时就需要潜艇救生装置。机动型救生钟是我国潜艇救援的重要专用设备,我国现役潜艇上都设有救生钟专用对接平台[1]。而铠装缆绞车就是专门为机动型救生钟而设计的新型特种绞车。铠装缆绞车安装于机动钟工作母船的甲板上,铠装缆存贮于甲板铠装缆绞车的卷筒上,当机动钟布放时,在空气中机动钟本体的重量由另一钢缆承载,一旦救生钟进入水中,通过啮合器把起吊钢缆转换为铠装缆来承载在水中的救生钟重量。
铠装缆绞车除了用于救生钟入水后的收放工作,同时也是铠装缆输送动力和传送信号的中转站[2-4],机动钟的水下工作状态,动作和水下采集数据均可通过铠装电缆和绞车将信号传送到中央控制室进行监控。
1 系统总体设计
本文以70 kN铠装缆绞车为研究对象,系统有两台22 kW电机泵组,互为备用。电机启动箱安装在液压泵站上,由于机动要求,泵站也是安装于甲板上,所以要求启动箱防护等级较高,能够达到IP56。启动箱主要采集现场泵站信号,以及控制电机启停,电机除湿和油箱加热等,不具有操作绞车动作功能。
铠装缆绞车操作功能在机旁操作台以及机旁遥控盒。机旁操作台固定在绞车本体上,操作台上有触摸屏,相应工况模式选择开关,报警指示灯以及操作手柄。机旁遥控盒有操作手柄,启停按钮以及显示仪表等。电气系统结构框图如图1所示。
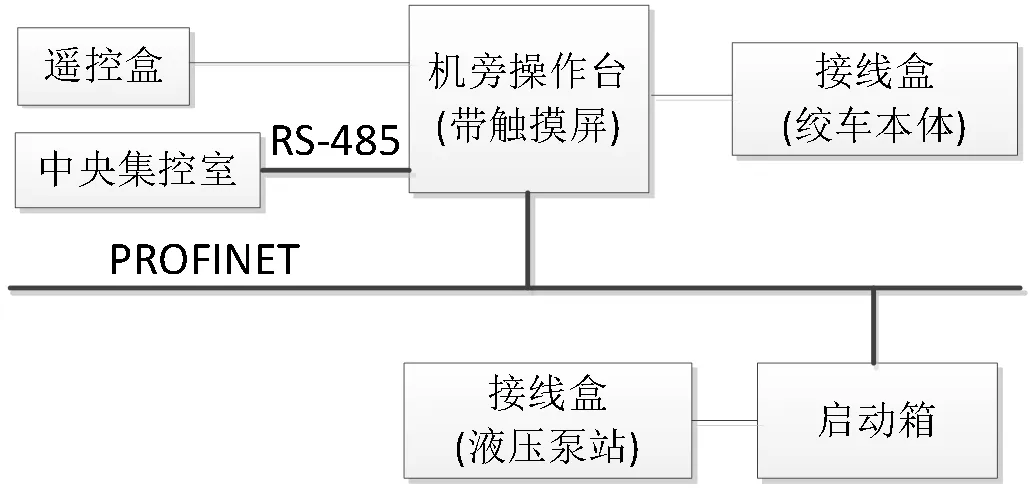
图1 电气系统结构框图
1.1 硬件设计
铠装缆绞车电气系统控制主站设在机旁操作台,控制器选用西门子CPU 1215C,他有两个RJ45网口,一个用于和启动箱分站通讯,一个用于和触摸屏通讯,用CPU本体自带的高速计数器接口连接编码器,用于测定卷筒转速和缆长计算。扩展模块包括:DI 8x24 VDC/DQ 8xRelay输入输出模块一块;AI 4x13BIT/AQ 2x14BIT模拟量输入输出模块一块,用于采集机旁操作台和遥控盒操作手柄信号、绞车测力销轴传感器信号,以及输出控制收放缆比例阀和遥控盒显示仪表;CM 1241通讯模块一块,用于和中央集控室RS485通讯。如图2所示。
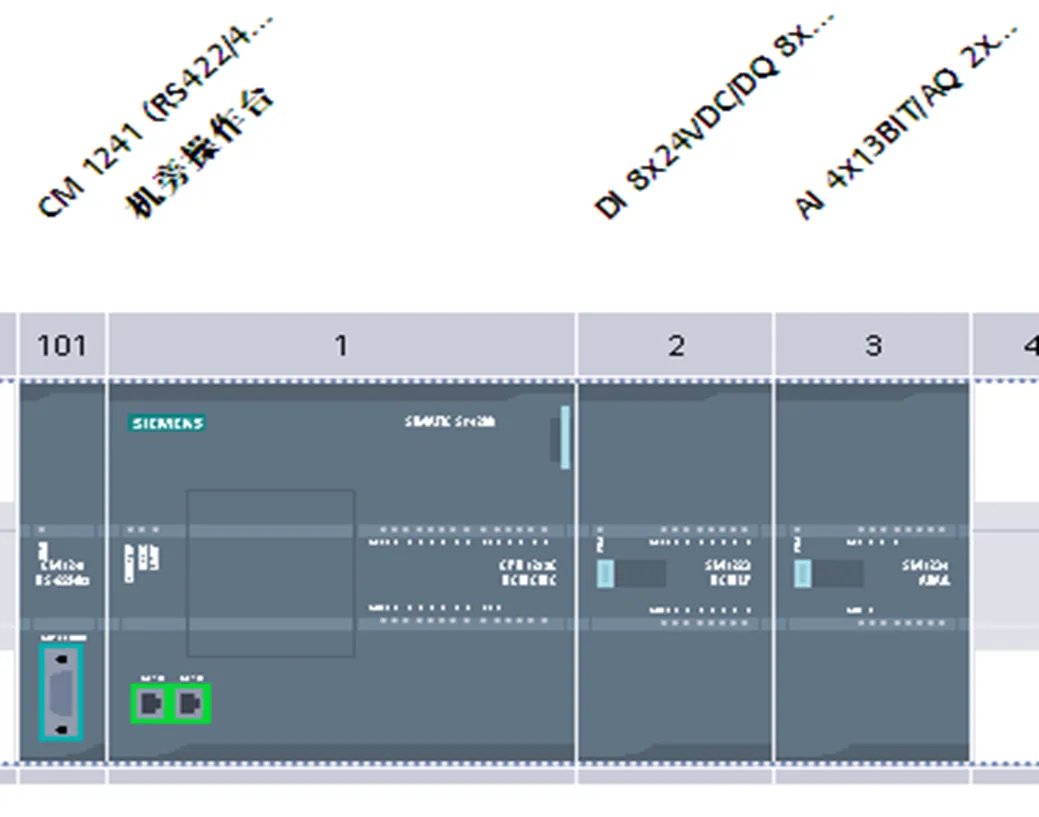
图2 机旁操作台硬件组态图
启动箱用ET200sp远程I/O分站,接口模块选用IM 155-6 PN ST,扩展模块包括:DI 8x24VDC ST数字量输入模块一块;DQ 8x24VDC/0.5A ST数字量输出模块一块;AI 2xU/I 2-,4-wire HF模拟量输入模块一块,用于采集现场泵组压力信号。
机旁操作台主站和启动箱分站以及触摸屏之间通过PROFINET网络通讯,启动箱远程I/O站点采集的数据通过PROFINET网络传输给CPU,CPU经过逻辑运算处理再输出给各执行器件。系统网络组态如图3所示。
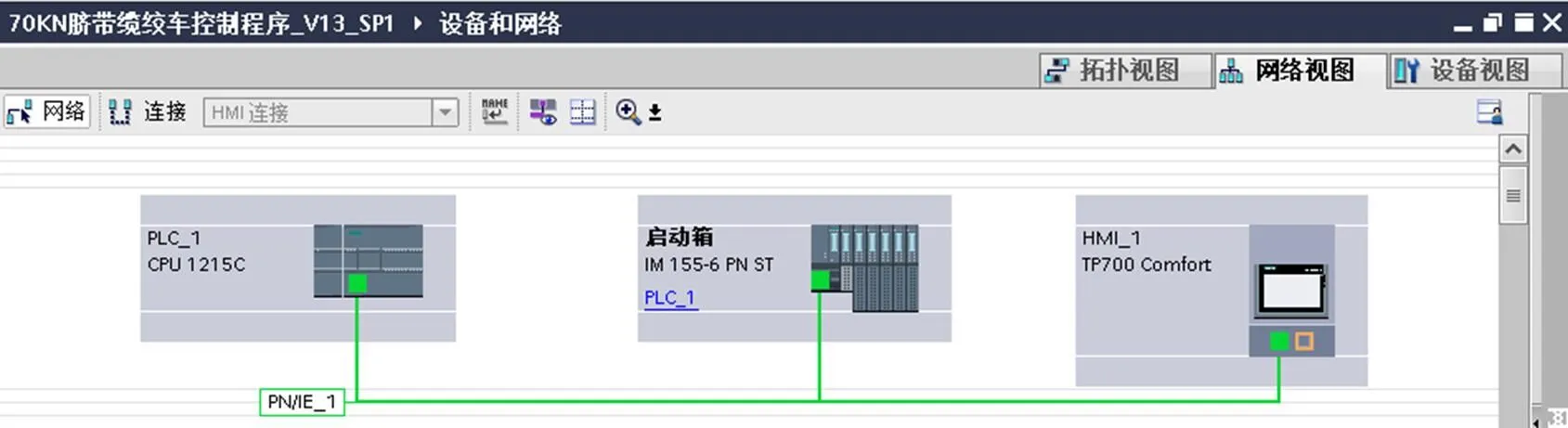
图3 系统网络组态图
1.2 软件设计
软件设计主要包括控制程序设计和触摸屏程序设计。软件开发工具为西门子TIA Portal V13。TIA博途组态设计框架将全部自动化组态设计系统完美地组合在一个单一的开发环境之中[5],编程高效,移植方便。控制程序设计采用模块化编程的设计思想,把程序分成若干程序块,这样可以减少编程的工作量,增加程序的可读性和维护性。控制程序主要包括主程序Main(OB1),Startup(OB100),Cyclic interrupt(OB30),报警与指示灯功能(FC1),电机控制功能(FC2),绞车动作控制(FC3),阀组逻辑控制(FC4)以及其他功能块FB和数据块DB。
报警与指示灯功能FC1中,采用模块化报警程序,相当于库函数,每种报警只需要改变功能块输入的报警变量以及输出的报警指示灯即可,简单方便。电机控制功能FC2也是使用的模块化编程,开发好标准的电机星-三角启动功能块。电机启动时,运行指示灯闪烁,电机正常运行后运行指示灯常亮,电机没有正常启动会报警提示,还可以设置电机的启动间隔时间,以保护电机。绞车动作控制FC3是控制程序核心,包括常规动作控制,手柄控制,以及针对铠装缆绞车专门开发的拉力滤波程序和拉力临界值区间控制程序。
触摸屏程序主要包括主界面,状态界面、设置界面和报警记录界面。主界面显示绞车动作的动画状态和主要控制参数,比如系统压力,缆绳张力,缆绳放出长度,收放缆速度等。状态界面包括控制器各数字量端口状态和模拟量端口AD值和实际值。设置界面主要是拉力报警值设置和缆绳位置设置,可以在任何位置设置缆绳,程序会自动计算当前缆绳放缆长度和剩余缆长。报警记录界面主要记录报警数据,方便故障查询和故障处理。
2 系统关键技术研究
铠装缆绞车控制主要就是如何控制好卷筒收放动作以及相应动作保护,使控制动作更加精确和平顺。
2.1 拉力信号四阶滤波
通过测力销轴采集的拉力信号由于容易受安装位置和现场环境因素等影响,设计了四阶滤波函数。四阶滤波也是一种线性滤波,即在单位采样时间内,把邻域四个采样信号取平均,用平均值来代替某一采样信号,可有效抑制信号干扰,增强拉力控制的准确性。
2.2 拉力临界值区间控制
在收揽过程中,当缆绳张力大于70 kN时,提示声光报警,并自动切换到放缆;当缆绳张力小于等于70kN时,报警解除,恢复到原收揽状态。在放缆过程中,当缆绳张力大于20 kN时,提示声光报警,并全速放缆;当缆绳张力小于等于20 kN时,恢复到原来放缆速度。控制的临界值是一个控制点,实际使用中会出现拉力值刚好出现在这控制点上下范围内波动,导致收放动作或放缆速度频繁切换,影响液压阀件使用寿命。该控制系统控制精度要求为±2kN,程序中做临界值区间控制,当张力大于规定张力时。触发报警和相应动作,张力小于误差下限值时才解除报警,恢复原动作。区间控制功能模块如图4所示。
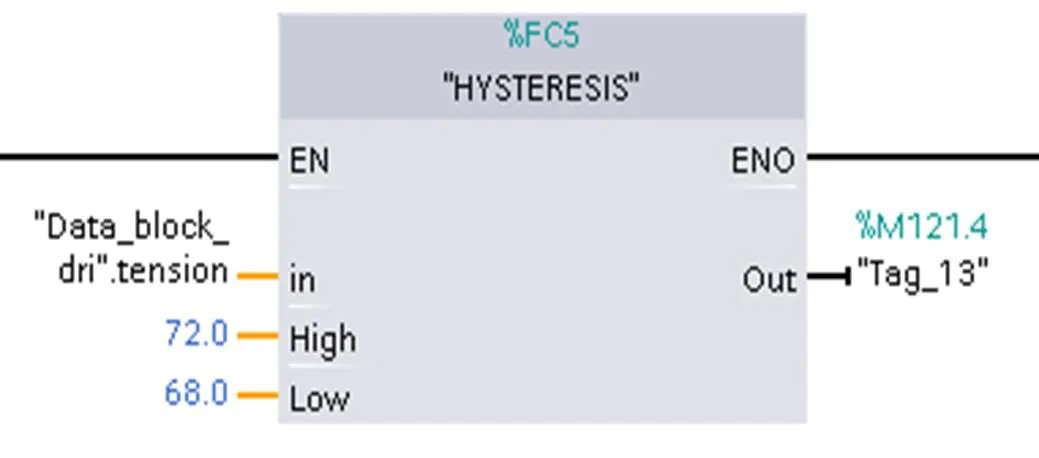
图4 区间控制功能模块图
3 结束语
铠装缆绞车控制系统能很好地满足铠装缆绞车控制动作要求,同时,触摸屏界面生动的动画效果和动态参数能实时监控绞车状态,当有故障或报警时,系统能及时发出报警提示,并能显示故障或报警源。通过对拉力信号四阶滤波处理,控制精度更加精准。拉力临界值区间控制,可有效避免拉力在临界点跳变导致的动作切换问题。该系统在实际海试过程中,效果良好。
[1] 赵俊海,刘涛,崔维成. 新型机动型救生钟铠装缆绞车的研制[J]. 中国造船, 2012, (4):118-127.
[2] 邓智勇,曾钕钋,张浩立.一种新型张力保护自动收放脐带缆绞车装置[J].海洋工程,2010, (8):107-111.
[3] 陈育喜,张竺英. 深海ROV脐带缆绞车设计研究[J].机械设计与制造, 2010, (4):39-41.
[4] 王海波, 王庆丰. 水下拖曳升沉补偿系统设计及其内模鲁棒控制[J].机械工程学报,2010,(4):128-132.
[5] 崔坚. SIMATIC S7-1500与TIA博途软件使用指南 [M]. 北京: 机械工业出版社, 2016.
Design and Research of Control System for Armoured Cable Winch
Ding Ping1, Shi Xiaomei2, Li Hongcong1, Jiang Hengshen1, Chen Liming1
( 1. WuxiDelin Marine And Ocean Technology(Group)CO.,LTD , Wuxi 214191, Jiangsu,China; 2.XuzhouXugongExcavator Machinery Co.,LTD,J Xuzhou 221000, Jiangsu, China)
U665
A
1003-4862(2018)07-0051-03
2018-03-23
丁平(1984-),男,硕士,工程师。研究方向:船舶特种设备自动化与控制。
猜你喜欢
数学物理学报(2022年6期)2022-12-15 08:45:54
电线电缆(2021年1期)2021-03-29 02:26:42
防爆电机(2020年6期)2020-12-14 07:17:02
船舶标准化工程师(2020年5期)2020-10-17 03:26:04
上海海事大学学报(2019年4期)2019-12-30 01:36:40
电子制作(2018年14期)2018-08-21 01:38:32
中国港湾建设(2017年11期)2017-12-19 12:27:06
水利技术监督(2016年6期)2017-01-15 14:01:45
水利信息化(2015年5期)2015-12-21 12:54:40
四川师范大学学报(自然科学版)(2015年3期)2015-02-28 14:07:53
