
适应数字化航道运行模式的驾控集成研究
2018-08-14 06:18:50张云军邹明雷田雪莲吴志东
船电技术 2018年7期
张云军,邹明雷,肖 云,田雪莲,张 铭,倪 敏,吴志东
适应数字化航道运行模式的驾控集成研究
张云军1,邹明雷2,肖 云1,田雪莲1,张 铭3,倪 敏4,吴志东5
(1. 长江南京航道局,南京 210011;2.武汉南华工业设备工程股份有限公司,武汉 430223;3.长江上海航道处,上海,200010;4.长江南京航道处,南京 210011;5.武汉理工船舶股份有限公司,武汉 430070)
为适应数字化航道运行模式,针对南京航道局船舶现存的问题,提出建设可靠异构船舶信息网络、优化设计驾控布局及驾控设备集成的建议,期望对后续航道局船舶驾控集成提供帮助。
数字化航道 驾控布局 船舶信息网络 驾驶设备集成
0 引言
随着长江数字化智能航道系统的不断发展,长江南京航道局监管指挥中心已实现长江数字航道图、航段视频监控、水位遥测及航标管理等一系列功能,并与下属各类船舶实时数据共享,极大地提高了水域航行的安全性。但由于传感器和数字终端的新装,以及历年船舶部分系统持续升级引起的控制设备不断增加,导致船舶驾控安装的设备越来越多,给船舶操纵和设备管理带来许多问题。因此,通过对南京航道局下属几款类型船舶的调查,经综合分析,提出了为适应数字化航道运行模式下的船舶驾驶室控制集成化设计思路。
1 现状分析
南京航道局下属船舶以航标船和测量船为主,其代表性船型为30米A型、B型航标船。以30米A型为例,为适应数字航道系统需求,驾控台额外配置有专用AIS系统、专用长江电子江图系统等设备,同时为加强航道局对下属船舶的远程管理,30米A型上还装设有综合信息系统等小集成设备。这些新增系统和设备,在实船上存在着无处安装、安装位置不合理、设备重复等一系列问题,造成了当下船舶驾驶存在着信息不易观察、操作不便利等安全隐患。同时调查还发现,早期安装的通导及操控设备存在通讯接口封闭、显控部件过多、尺寸过大等局限性问题。这些问题对于数据共享、操控布局的合理化都带来了潜在的影响。
长江航道数字化系统的发展目的是实现流域航道、船舶综合数据共享,以及基于数据的安全管理及辅助决策。对于船舶操控系统,需要具备相应的数据采集能力,能融入数字化航道管理系统,并能从数字化航道系统中获益,提高管理和安全操控能力,同时也应预留一定的发展空间和余量。通过对30米A型船的现状及驾控台各类系统功能的调查了解,对于航道公务船舶,为适应长江航道数字化运行模式,至少需要从可靠异构的船舶信息网络、驾控台布局设计及驾控设备集成三个方面进行分析和解决。
2 船舶驾控集成的实现
2.1 可靠异构的船舶信息网络
在信息化和数字化升级的背景下,船舶操控系统均需接入航道局所属的大数据平台。而船上通导、监控等设备因厂家层次、型号的不同,在数据通讯上存在着端口封闭及协议各异等问题。

例如:通导设备多遵循IEC61162广播式协议,监控设备多遵循Modbus-RTU协议及自由口协议等,因此首要解决的是不同协议、不同传输速率下的通讯匹配问题。同时船舶数据亦需无线传输至岸端,但航道局自建基站仍存在覆盖盲区、信号丢失等问题。为此,需要建设一个基于以太网的船舶网络系统(见图1),既能实现异构协议的转换,又能实现数据的持续传输,具体方法如下:对于通导设备,包括专用AIS及电子江图,可配置具备数据存储及透明协议转换功能的网络匹配设备,例如研华的串口服务器,通过数据的缓存和抽样运算实现速率匹配并将数据传至船网。对于船岸通讯,在航道局专网的基础上,可配置一套4G移动通讯链路作为补充,在完全无移动信号覆盖的特殊航段,可设计网络通讯监测及补发数据功能,确保数据远传的完整性和可靠性。
2.2 驾控台布局设计
在数字化航道背景下,航道局船舶因其工作性质及信息化、数字化的要求,其配置的设备较多,在布局时因有限的操控空间与设备间的配合需求及设备的自身缺陷之间存在更为突出的矛盾,进而对操船人员的劳动强度和船舶航行安全造成了较大的影响。在30米A型船驾控台的布局上,因操控设备普遍尺寸较大,很难于兼顾操作的重要性和合理性,往往完成一套操作流程需要到不同的工作位置;另外台面布局过满,造成后期系统升级或新增时设备只能随机安装,导致观察视线遮挡等一系列问题。为此,经调研分析,提议设置三个固定操船位置,包括操船位、航行管理位及其他工作位,每一个工作位都能够就近实现职能工作及操控流程,具体的工作位操控范围参见图2同操作人员水平操作范围。
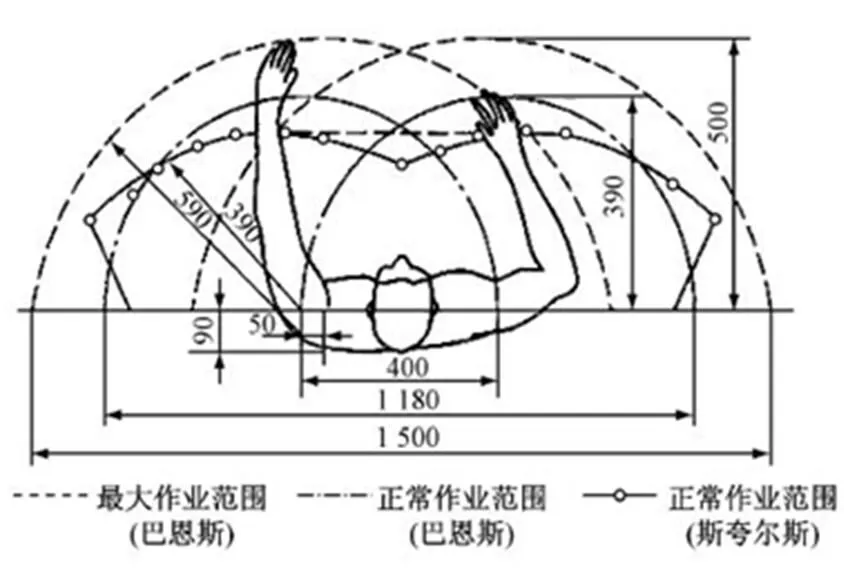
图2 操作人员水平操作范围
参见图2,最大作业范围可定义为手臂向外伸直,以肩关节为中心,手臂伸直,手掌半握,在台面上运动所形成的轨迹。在这个范围附近操作时,静力负荷比较大,长时间操作容易引起疲劳,因此驾控台面上元器件的分布横向及纵向距离都应控制在一定范围内。
各操作站在建议范围内,按重要级顺序以视线平视为中心布局观察设备,以手臂自然弯曲位置为中心布局操作设备;整体提高操作人员与设备布局的匹配和契合度。
2.3 驾控设备集成
在数字化航道背景下,简化船舶配置设备,降低操船人员工作强度,实现驾驶系统集成化已是业内公认的一个趋势。30米A型船的航区属于内河,按照CCS船规其配置可参见表1,CCS船舶驾控设备配置要求[1,2]。按船规的强制要求,各类操船设备及通导设备等必须保持独立性;也源于此,当前Kongsberg、古也、海兰信等厂家在驾控集成上也仅能做到同一平台下显示设备的切换,还不能做到融合于一个设备的高度集成。当下基于一个设备的操控和通航信息集成,无论从规范角度还是从设备制造角度都还不具备可行性,但基于额外系统的信息采集和融合是允许的,并且在航道系统的实船上已经有得到部分的应用。此外,对于驾控台上非主重要设备,在与船检单位达成共识的基础上,可以结合定义的工作位职能,有限度地进行物理集成。因此,针对数字化航道运行模式下的船舶集成化,其更为推荐的关注重点是通航、驾驶、动力、电力、视频、港口、气象等综合信息的驾驶室集成。
3 结束语
南京航道局船舶在数字化航道系统建设下,存在着影响船舶操控的一系列问题。为解决这些问题,通过实船调查分析,提出了适应不同设备通讯的网络化建设、驾控台布局优化及驾控设备有限度集成的方法,以适应当下数字化航道运行模式的需求,并预留扩展余地,为下一步航道局新造船舶操控系统的建设提供了技术支撑和建议。
[1] 中国船级社. 钢质内河船舶建造规范(2016)[M].北京:中国船级社, 2016.
[2] 中华人民共和国海事局. 内河船舶法定检验技术规则[M]. 武汉:武汉规范所, 2011.
Research on Integrated Bridge Control for Digital Channel Operation Mode
Zhang Yunjun1, Zou Minglei2, Xiao Yun1, Tian Xuelian1, Zhang Ming3, Ni Min4, Wu Zhidong5
(1. Changjiang Nanjing Waterway Bureau, Nanjing 210011; 2.Wuhan Nanhua Industrial Engineering Co., Ltd, Wuhan 430223; 3. Changjiang Shanghai Waterway Department, Shanghai 200010; 4. Changjiang Nanjing Waterway Department, Nanjing 210011, China; 5.WUT Ship Co., Ltd, Wuhan 430070, China)
U657
A
1003-4862(2018)07-0062-03
2018-04-23
张云军(1974-),男,高级工程师,研究方向:船舶建造、维修和技术管理工作。
猜你喜欢
能源(2017年5期)2017-07-06 09:25:57
留学(2017年5期)2017-03-29 03:03:54
中国科技信息(2016年15期)2016-11-04 12:47:31
中国卫生(2015年2期)2015-11-12 13:13:48
新闻传播(2015年6期)2015-07-18 11:13:15
中国医疗美容(2015年4期)2015-04-27 02:24:06
中国医疗美容(2015年4期)2015-04-27 02:24:06
制造技术与机床(2015年10期)2015-04-09 07:06:10
创业家(2015年1期)2015-02-27 07:52:12
水道港口(2014年1期)2014-04-27 14:14:38
