临近空间长航时太阳能无人机气动研究综述*
2018-08-12 10:48:30李晨飞姜鲁华
世界科技研究与发展 2018年4期
李晨飞 姜鲁华
(1.中国科学院光电研究院,北京100094;2.中国科学院大学,北京100049;3.中国科学院高能物理研究所,北京100049)
1 引言
临近空间因其重要的开发应用价值而在国际上引起广泛关注,临近空间长航时太阳能无人机作为探索这一领域的重要飞行器,其潜在的重大战略意义使其相关技术成为各国的研究焦点。此类无人机是电动无人驾驶飞行器,以太阳能为能量来源、螺旋桨为推进系统[1]、依靠气动升力飞行、航时长于24 h、飞行高度多位于18 km以上临近空间领域[2],具有飞行高度高、受天气和上下对流气流影响小、留空时间长、作业范围广、可重复使用、效费比高、生存能力强等特点,可执行应急信息保障、战区预警、通讯中继、侦察监视、电子对抗等军事任务以及大气研究、灾害监测、互联网服务等民用任务。在未来战争中,临近空间无人机将成为侦察卫星和有人驾驶战略侦察机的增强手段和重要补充[3,4],在空间攻防和信息对抗中能发挥重要作用,进一步促进空天一体化的发展,拥有广阔的发展前景,其特殊的战略位置将为未来战争开辟一个新战场[5,6],可能对未来整个作战体系和作战思维产生深远影响[7]。近年来,临近空间长航时太阳能无人机已经成为各国武器装备发展的重点,被美国空军列为21世纪的关键技术之一[8];英国也在持续发展“西风”系列太阳能无人机,并计划在欧美、澳大利亚等地进行试飞验证等工作[9](表 1)。
在进行临近空间长航时太阳能无人机总体设计时,气动布局形式在很大程度上决定着无人机的气动效率[10]。因此,在设计气动外形时,要根据任务需求配置任务载荷,在满足可靠性等基本性能要求的基础上,将结构设计、动力系统、能量系统等多方面耦合起来,综合协调,进而达到设计最优化。

表1 几款临近空间长航时太阳能无人机Tab.1 Several near space long endurance solar-powered unmanned aircraft
2 临近空间长航时太阳能无人机气动研究现状
临近空间长航时太阳能无人机的飞行环境位于临近空间,该领域环境具有空气密度低、太阳辐射强等特点[11]。该环境下,无人机飞行高度大、飞行环境空气稀薄、飞行雷诺数通常较低;需要较大的机翼面积来铺设太阳能电池板(目前太阳能电池阵列能量转化效率较低);通常采用大展弦比机翼来提高气动效率以延长续航时间(根据诱导阻力系数与升力系数的平方成正比、与展弦比成反比的原理,大展弦比机翼的减阻效果明显,而且在采用推进式螺旋桨飞行时具有较大的气动优势)。
2.1 低雷诺数翼型研究
临近空间长航时太阳能无人机一般采用小后掠角、大展弦比机翼的气动设计形式,机翼失速特性取决于翼型,因而需研究专用的低雷诺数翼型,以满足气动特性要求。与传统高雷诺数翼型相比,低雷诺数翼型在气动外形上即存在较大差异,更平坦并且厚度较小(图1)。常见的系列有Eppler系列、Goe系列、SD系列等。
目前,国内外对低雷诺数翼型有研究但不充分。Lissaman对其概念、理论设计以及实验研究验证进行了综述性概括,DrelaDark通过研究边界层流动分离的相关现象,分析了其气动特性的影响因素,包括相关气动设计参数等[12];李俊鹏等[13]采用Parsec方法来降低翼型不确定性并稳健优化;中国航天空气动力技术研究院以及刘沛清等[14]对低雷诺数对称翼型E387的绕流特征进行了数值研究,并与风洞试验进行了对比(表2),发现误差在许可范围内,且层流分离现象是非定常时,翼型后缘的长分离泡是周期性脱落的分离涡,这为低雷诺数翼型绕流的数值研究打下了基础。

图1 低雷诺数翼型与常规翼型外形对比Fig.1 Low Reynolds number airfoil compared to conventional airfoil

表2 E387翼型升力系数与阻力系数数值计算与风洞试验对比[14]Tab.2 Theoretical value of Lift and drag coefficient compared to experiment value[14]

图2 低雷诺数翼型SD7037气动参数系数随攻角变化曲线(Re=3×105)[15]Fig.2 Aerodynamic characters of low Reynolds number airfoil SD7037 changed with angle(Re=3×105)[15]
西北工业大学无人机特种技术重点实验室采用SA模型和更为精细的转捩模型k-kl-w湍流转捩模型来对低速条件下临近空间大展弦比无人机的低雷诺数翼型流动进行研究[15](图2),发现后者误差更小,还能模拟出翼型表面流动分离与再附现象,并将翼型表面复杂的流动现象及其特征表现出来,精确度较高,更适用于低雷诺数流动问题的分析求解。此外,对于翼型在不同雷诺数下的气动分析(图3)也验证了随着雷诺数增大,升力系数及升力线斜率增大、阻力系数减小、升阻比明显提高,且最大升阻比所对应的气动攻角也随之减小,翼型气动特性趋于良好。这一结论更突显了对于低雷诺数翼型研究的迫切性。
刘晓春等[16]根据临近空间太阳能无人机在研制中遇到的实际工程问题,以FX63-137为基准翼型,对Baseline翼型和5种折线型翼型在低雷诺数下的设计准则和气动特性进行分析发现,不同于Baseline翼型压力分布的光滑连续性,折线翼型出现的峰值和谷值显示了其翼型表面附面层内流动的膨胀压缩变化,且压力分布所围成的面积稍有增加,这可对升力的增加起到帮助作用。这一研究验证了折线翼型在临近空间长航时太阳能无人机设计上的应用可行性。
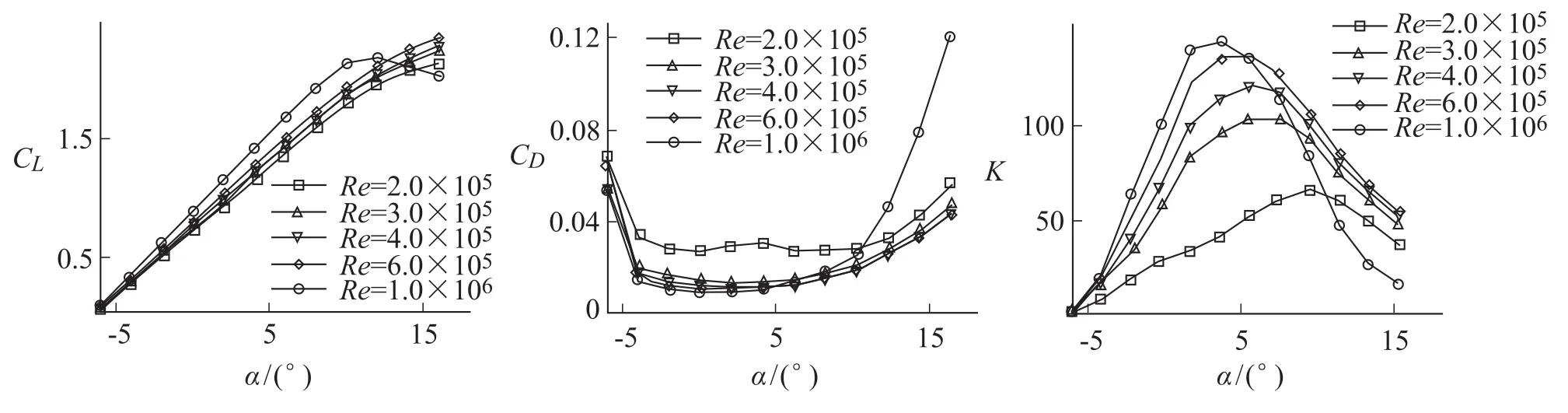
图3 升力系数、阻力系数及升阻比随攻角变化曲线[15]Fig.3 Lift,drag coefficient and lift-drag ratio change with angle[15]
此外,低雷诺数翼型气动优化的方式多为单点优化和稳健优化[17],多点优化的研究较为罕见,这也是目前低雷诺数翼型研究的空白领域。
2.2 大展弦比轻质机翼研究
随着性能和需求的提升,并且为了符合其飞行特点,大展弦比机翼逐渐成为临近空间长航时太阳能无人机的主流结构形式。这类机翼具有升阻比高、重量较轻、变形较大等特点,但其静/动力学变形问题突出,几何非线性效应十分显著。Britt等[18]通过风洞试验对大柔性机翼进行分析,得到了机翼结构的低速失稳区域,在此基础上研究极限环响应的结论显示,在风洞试验中柔性机翼模型的最大变形可达50%。我国对大展弦比柔性机翼的风洞试验研究仅限简化的机翼模型,通过研究初步验证了一些分析机翼几何非线性气弹问题的方法[19]。针对CFD/CSD耦合求解大展弦比机翼几何非线性气动弹性问题,安效民等[20]基于 Co-rotational理论,发展了一种几何大变形下的非线性弹性求解方法。谢长川等[21]在不充分考虑相似准则的基础上,建立无真实对应结构的机翼模型(表3),在考虑大变形几何非线性效应的条件下,研究了大展弦比机翼在外载荷作用下的气动弹性特点。基于机翼颤振分析结果可知,当外流场风速接近线性颤振速度时,大展弦比机翼翼尖变形是半展长的45%,结构扭曲问题十分严重(图4),且大展弦比机翼的扭转频率及其对应的弯扭耦合颤振临界速度会随翼尖变形量的增加而减小,这表明了机翼翼尖较大的变形会对机翼刚度产生较大的影响。
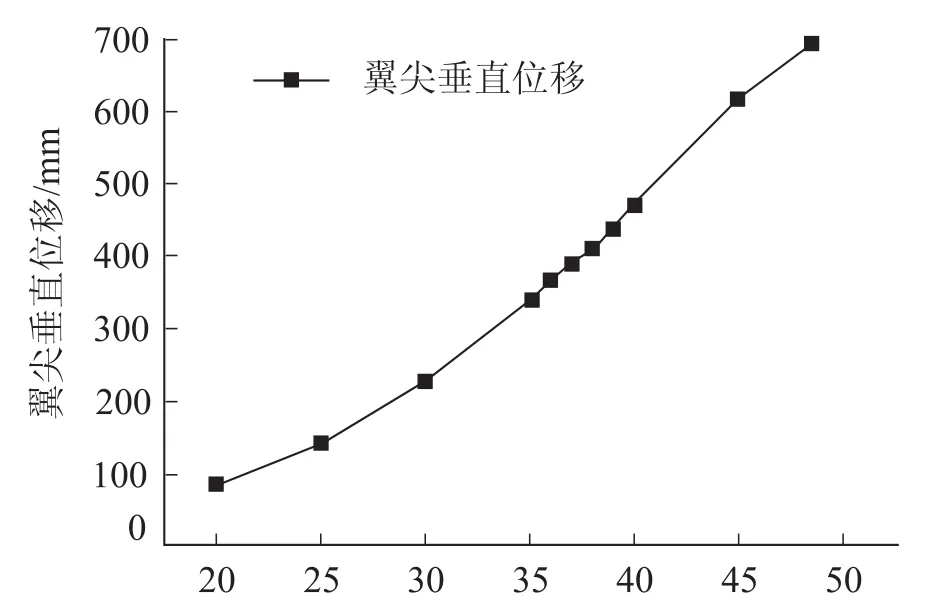
图4 大展弦比机翼翼尖垂直位移随风速变化曲线[21]Fig.4 Tip vertical displacement of high aspect ratio wing model change with wind velocity[21]

表3 大展弦比机翼模型参数[21]Tab.3 Parameters of high aspect ratio wing model[21]
目前,对于大展弦比机翼大变形气动弹性试验来说,其变形量的准确测量十分困难,有待专用风洞测量技术的发展;此外,目前对于大展弦比机翼气动弹性问题的研究多采用简化模型,通过风洞试验,针对复杂模型进行较为系统化的几何非线性气动弹性问题研究还基本处于空白阶段。
2.3 气动布局研究
飞机气动布局的设计主要是在分析研究各个气动面的气动特性以及相互作用基础之上,合理配置各气动面的相互位置、形状和相对的尺寸关系,进而使飞机具备良好的气动特性[22],满足其任务需要。目前,临近空间长航时太阳能无人机气动布局形式主要有常规布局和飞翼布局两种形式,但也不乏折叠翼布局、变体式布局等新型气动布局的尝试(图 5)[23]。
1)常规气动布局
常规气动布局发展至今,已有前掠翼布局、可变后掠翼布局、三角翼布局、边条翼布局等形式。其中,可变后掠翼对于改善飞机升力特性和升阻比效果明显(如图6),在飞行攻角变化范围较大的无人机设计应用上有优势[24]。西北工业大学使用扩展自由变形参数化方法对混合层流流动控制后掠翼的雷诺数影响、气动外形设计等问题进行分析,发现对于阻力系数较小、层流区较长的后掠翼而言,其上表面压力分布的头部峰值均较低,其后跟随小区域逆压,在终止于激波前还要经过一段较长的、均匀稳定的顺压区域[25]。这对于通过实现大面积层流区,并综合考虑压差阻力、摩擦阻力以及激波强度等因素来改善机翼阻力特性有着重要意义。
常规气动布局形式在临近空间长航时太阳能无人机的设计应用上较为普及。英国的Zephyr7[26]、谷歌公司的 Solara[27,28]、Facebook的 Aquila[29,30]以及中国的“彩虹号”[31,32]均采用了常规平直翼的气动布局形式。
2)飞翼气动布局
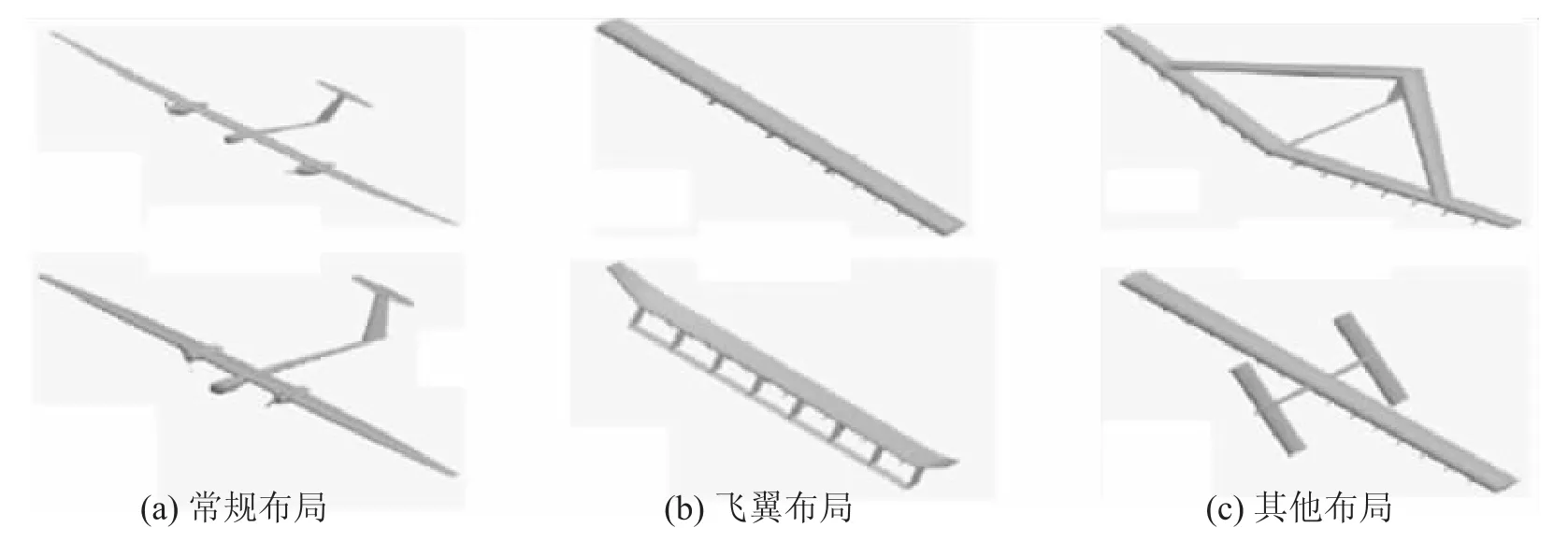
图5 无人机几种典型气动布局形式Fig.5 Several typical aerodynamic layouts of UAV
飞翼气动布局为单一机翼式布局,采用翼身融合的设计形式,气动效率较高,但在稳定性和操控性方面存在固有缺陷,发展一直受到制约。飞翼布局无人机在大攻角下的纵向气动特性变化剧烈,焦点位置会出现明显的前移现象,使俯仰力矩系数出现拐点(图7),这对稳定性十分不利,因此在考虑操纵性和稳定性的匹配设计时需要综合考虑小攻角和大攻角两种气动状态。西北工业大学365研究所针对这一问题提出了多轴静不稳定飞机增稳控制设计方法,为无尾飞翼布局无人机的操纵面设计提供了综合策略,对稳定性的改善效果明显(图8),加阻尼增稳控制后,无人机在受到扰动后能够快速收敛到平衡为止,确保了整机系统的稳定性[33]。
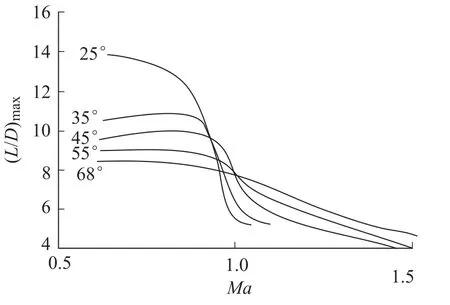
图6 最大升阻比与后掠角的关系[24]Fig.6 The relationship of maximum lift-to-drag ratio and sweepback[24]

图7 飞翼布局无人机俯仰力矩特性曲线Fig.7 Pitching moment characteristic curve of flying-wing layout UAV
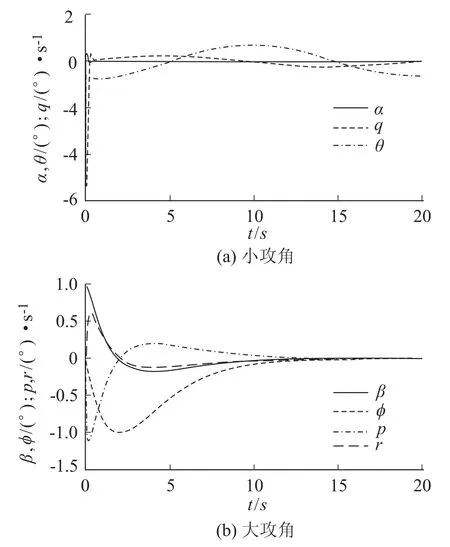
图8 飞翼布局无人机受扰纵向增稳控制响应曲线[33]Fig.8 Flying wing layout UAV is subjected to longitudinal stability control response[33]
在改善飞翼布局控制性方面,国内也有研究。在对线性最优二次型LQR控制技术进行改进的基础上,李一波等[34]提出了一种准指令跟踪增广LQR方法,并验证了该方法对于飞翼布局无人机纵向模态飞行品质的改善作用;通过将自适应控制与鲁棒LQR方法结合,李卫星等[35]设计了适用于飞翼布局无人机的纵向飞行控制器,为飞翼布局无人机的控制性优化提供了参考。此外,北京空天技术研究所提出了具有两个相互垂直对称面的双向飞翼布局飞行器概念(图9),根据飞行速度不同,飞行器通过机身旋转实现飞行模态的转换,进而调节展弦比大小以达到最佳气动特性,具备宽速域升阻比特性(图10),在亚音速、跨音速及超音速均可保持高效的气动效率,这一优势或可使该布局形式成为未来发展的一个新方向[36]。
在应用上,美国“Helios”、“太阳鹰”采用的是飞翼布局。这种布局设计常常与大展弦比机翼结合起来,造成大尺寸轻质无人机的控制和稳定性问题以及柔性机翼气动结构耦合问题,美国Helios试验中的解体坠毁正说明了对于这一问题的研究不容无视。

图9 双向飞翼空天飞行器概念外形图[36]Fig.9 The concept outline of the two-way flying wing air vehicle[36]
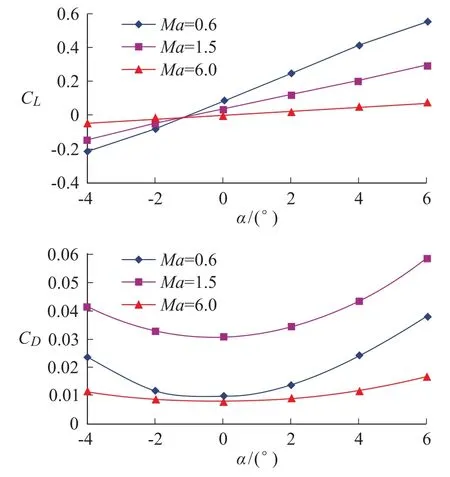
图10 双向飞翼空天飞行器宽速域升阻特性曲线[36]Fig.10 The wide velocity domain lift-drag characteristic curves of the two-way flyer[36]
3)其他新型气动布局
除了常规布局和飞翼布局外,其他新型气动布局在临近空间长航时太阳能无人机也有应用。极光飞行科学公司的“奥德修斯”采用可拼接、可折叠的模块化设计,由三个独立飞行器组成,有助于克服超大展弦比布局在起飞上升阶段所面临的气动问题,增强上升过程中在对流层领域抵抗湍流的能力,进而避免了可能由机翼过度扭曲而造成的结构破坏[37],这一方案的提出为临近空间长航时太阳能无人机变体气动布局的研究开辟了新思路。德国DLR(German Aerospace Center)2017年提出了一种采用极端柔性机翼、分段式设计方案,该方案的机翼可由翼尖向翼根弯曲,随上升气流作用而弯曲,直至机翼面结构应力可抵抗上升气流作用力,再随之恢复原状,以避免机翼结构在扭曲时受到损害;机身由有效载荷、推进系统等分段组成,并可按照任务所需进行组合,使无人机气动布局灵活,也可避免大展弦比机翼的结构扭曲变形问题[38]。

图11 美国临近空间太阳能无人机“太阳神”系列的飞翼布局[37]Fig.11 Flying-wing layout is applied to near space solar-powered UAV"Helios"[37]
总的来说,在目前新型布局的实践中,无论是常规布局还是飞翼布局,大展弦比机翼气动结构耦合的气弹问题均较为明显,飞翼布局稳定性和控制问题也比较突出,变体布局以及柔性机翼等各种新型布局的尝试也是为解决大尺寸、轻质结构在飞行过程中易发生的结构扭曲以及低雷诺数气动等问题。
3 临近空间长航时太阳能无人机气动设计难点问题
由于飞行环境多位于临近空间领域[39],高于18 km、空气稀薄、飞行动压小,临近空间长航时太阳能无人机在气动设计上具备不同于常规飞行器的特征,这也使得传统的、适用于常规飞机的气动设计方法不再完全适用于其设计。
3.1 低雷诺数气动特性问题
在同样的机翼弦长和速度条件下,雷诺数与大气相对密度成正比,因而在飞行高度大于18 km时,无人机的主翼、安定面的雷诺数大致为105量级,推进系统螺旋桨剖面当地雷诺数更低,多为104量级,均属于低雷诺数范畴。因而,如前所述,根据临近空间长航时太阳能无人机的特殊气动特点,需要对其低雷诺数翼型进行专有设计,并开展多点气动优化来改善翼型的气动特性。
此外,一般认为,当雷诺数低于1×106时,即使在小迎角下,都可能产生分离气泡[40]。在低雷诺数情况下,无人机整机的外流场层流附面层在逆压梯度作用下产生分离,并在空间转捩为湍流,将外层能量较高的气流引入附面层进而形成再附现象,产生层流分离泡。低雷诺数流动稳定性差,可能也与层流分离效应有很大关系。临近空间大气湍流度较低,使得翼面附面层稳定性较差,在较大升力系数巡航状态易发生急剧层流分离。低雷诺数流动另一典型特征是非线性效应,主要表现为小攻角时的非线性效应[41,42]和中到大攻角时的“静态滞回”效应。这些特征会造成无人机的总体气动效率、螺旋桨推进效率明显下降和气动特性不稳定,对飞行性能影响较大,加大了设计难度。因此为正确把握气动特性,必须开展边界层转捩、分离和分离泡的研究。
3.2 高升力气动特性设计问题
根据飞行器升力计算原理,当所需升力一定时,不同海拔高度所需的升力系数与当地飞行动压成反比。随着海拔高度的增加,空气密度和大气压力减小,即无人机的飞行高度越高,巡航飞行所需要的升力系数就越大。临近空间长航时太阳能无人机飞行高度大多处在18km以上的临近空间区域,这就使得高升力系数成为其重要气动特征之一。
由高升力带来的高诱导阻力可以通过增大无人机的展弦比以及改善翼载的椭圆分布来进行优化,旨在使无人机翼面维持更多的层流区域,进而避免后缘的流动分离,从而使其处于层流、湍流共存的流动状态。因而,若要巡航效率,对于边界层转捩和分离的研究刻不容缓[43]。
此外,临近空间环境空气稀薄,20km高度的大气密度不到地面空气密度的十分之一,因而为产生足够升力来平衡重力,机翼在保障无人机自身高升力特性的同时,还须有足够的速度以增大飞行动压,但在另一方面,为满足长航时的飞行要求,从降低能耗的角度考虑,不宜进行超声速飞行,以免增加空气压缩性使飞机阻力增大进而增加能量消耗,这又使得无人机的飞行速度受到较大限制。因此,在气动设计上,机翼除了需满足升力特性好,还需要综合考虑机翼升力特性和飞行速度。
3.3 大展弦比机翼的气动结构耦合问题
当前的临近空间长航时太阳能无人机普遍采用轻质、高比刚度和高比强度的符合材料结构[44],这使得其大翼展机翼在飞行过程中易产生较大的变形。这种结构变形反作用于气动载荷分布和气动性能,产生气动与结构的耦合问题,影响无人机的飞行器速度与飞行品质,并使机翼的自然频率与气动弹性特性发生显著变化[38]。较差的结构承载力和气动弹性问题也带来了稳定性和安全性的问题。同时,机翼的这种结构变形还会损伤其上所铺设的太阳能电池。临近空间长航时太阳能无人机对结构重量要求较高,因此,在未来研究中,需要大力发展专用风洞测量技术,以便准确测量大展弦比机翼大变形在气动弹性试验中的变形量,将变形量控制在可控范围内,并开展大展弦比下机翼的气动与结构耦合问题研究,积极探索复杂模型,以便对大展弦比机翼在风洞试验中所产生的较为系统化的几何非线性气动弹性问题进行研究,从而改善飞行中由大展弦比轻质机翼的结构变形而引发的气动问题。
4 展望
本文研究了临近空间长航时太阳能无人机的气动布局研究现状,并对其气动设计的难点问题进行了详细讨论。综合分析,由于临近空间领域较为特殊的飞行环境,临近空间长航时太阳能无人机在气动设计方面需要重点考虑低雷诺数问题、高升力设计问题、大展弦比机翼的气动与结构耦合问题以及太阳能能量系统与气动的关联设计等问题。鉴于临近空间长航时太阳能无人机自出现以来即承担的未来通讯,未来战略需求,其气动研究预计将朝着如下方向发展:
4.1 气动-隐身一体化设计
隐身是现代和未来武器装备的重要发展趋势,隐身技术的发展和应用也日益成为现代化战争中决定胜负的一个重要因素[45]。虽然临近空间飞行器位处临近空间领域,但仍存在被地面探测设备或空中侦察设备发现的可能,因而外形隐身化是基本要求。采用隐身技术,可缩短敌方探测设备发现目标的距离,提高其自身的生存能力和突防能力,进而实现作战的突然性。而无人机的隐身性能很大程度上决定于其气动布局方式,这使得其未来将向着气动-隐身一体化设计的方向发展。由于飞行任务和自身结构的制约,临近空间长航时太阳能无人机通常采用螺旋桨作为推进系统,实现隐身的条件十分苛刻,因此必须综合考虑气动、结构和隐身的要求,运用一体化设计思路来寻找气动和隐身性能要求的最优化组合[46]。影响其隐身性能的因素包括机翼构型、翼身结合方式、尾翼形式、部件遮蔽等,因此如何从低雷诺数条件下气动性能的要求出发,实现隐身要求是临近空间长航时太阳能无人机气动设计隐身化发展需要考虑的主要问题[47,48]。
4.2 非常规新型气动布局设计
为解决大展弦比机翼变形大、气动弹性问题显著和飞行控制实现困难等问题,近年来出现的临近空间长航时太阳能无人机基本上采用常规布局形式。但临近空间领域空气密度低等特点对气动要求较高,传统的常规布局形式可发挥的余地十分有限,且随着任务需求的多样化、复杂化,仅应用单一常规气动布局形式会限制无人机的发展,因此随着研究逐渐深入,探索非常规、高效、可靠、稳定的新型气动布局是临近空间长航时太阳能无人机未来发展的一大方向。
猜你喜欢
机械设计与制造(2021年2期)2021-03-05 10:00:14
兵器装备工程学报(2020年3期)2020-04-22 08:53:20
北京航空航天大学学报(2018年1期)2018-04-20 06:38:13
北京航空航天大学学报(2017年8期)2017-12-20 08:04:56
北京航空航天大学学报(2017年2期)2017-11-24 05:24:24
北京航空航天大学学报(2017年5期)2017-11-23 05:54:05
安徽农学通报(2017年18期)2017-10-18 21:11:49
西北工业大学学报(2015年4期)2016-01-19 03:31:38
西北工业大学学报(2015年4期)2016-01-19 03:31:37
西北工业大学学报(2015年4期)2016-01-19 03:31:36