
舰炮对岸弹道跟踪预测射击校正使用方法研究
2018-08-11 03:18:28张保山
指挥控制与仿真 2018年4期
宋 军,张保山
(1.解放军92941部队94分队,辽宁 葫芦岛 125001;2.江苏自动化研究所,江苏 连云港 222061)
大口径舰炮作为世界各国海军战舰的主要装备,具有威力大、效费比高、技术成熟、易于维护等特点,主要作战使命为对海和对岸(陆)打击。舰炮火控系统缺乏对岸远程目标精确定位的手段和远程目标射击效果观测手段,对岸作战往往依赖于舰上的光学观测设备,仅能对视距范围的目标实施观测和射击。
目前,舰载无人机技术日趋成熟,性能日臻完善[1]。无人机一般带有光学相机、电视摄像机和红外摄像机等,可充分利用空天一体化的信息获取手段,通过无人机图像和卫星图像进行配准可为舰炮指挥员提供准确目标位置信息[2-4],从而为精确打击提供有力的信息支持。鉴于无人机图像侦察在军事上的重要性,西方各国对其进行了广泛深入的研究,其应用不仅仅局限于基于图像的岸上远程目标精确定位,还包括目标自动识别与指示、运动目标检测与跟踪、打击效果评估等多个方面。
测速雷达[5]在大口径舰炮中得到了普遍的应用,其主要作用是测量弹丸出炮口的初速,为武器系统初速修正提供高精度保证,另外一个重要功能是提供弹动零时,这为弹迹指示、弹道跟踪与测量、弹道预测提供了重要理论基础。
本文以大地主题解算方式计算目标坐标,进行火控解算,根据测速雷达提供的弹丸初速信息和出炮口信号,指示跟踪雷达跟踪弹丸外弹道数据,火控进行预测弹丸落点,与无人机观测的目标和炸点视频进行了对比分析,为部队大口径舰炮对岸作战使用提供理论支撑。
1 对岸弹迹跟踪预测数学模型描述
1.1 大地主题解算实现对岸远程目标精确定位
目前舰船使用的舰位经纬度坐标通常是WGS84坐标系(World Geodetic System 1984)或者国家大地坐标CGCS2000(China Geodetic Coordinate System 2000)。此二者的常数定义及推导几何参数分别见表1、表2。
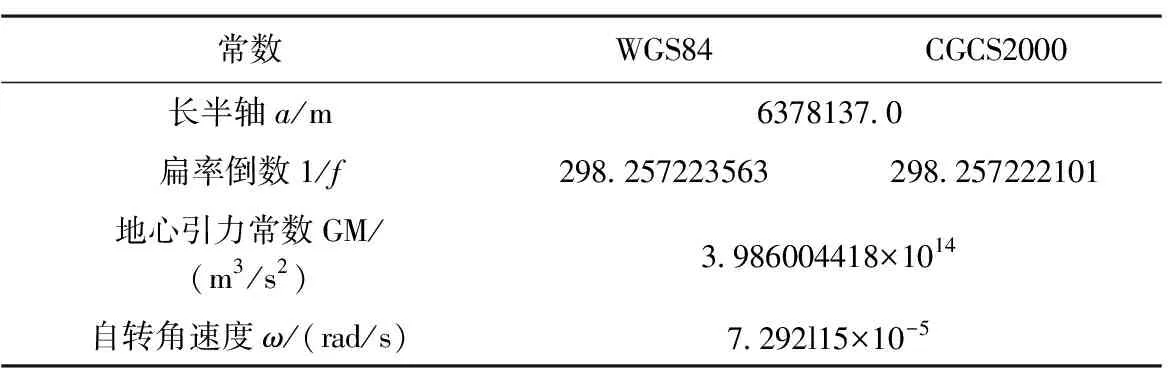
表1 CGCS2000椭球与WGS84椭球常数定义参数
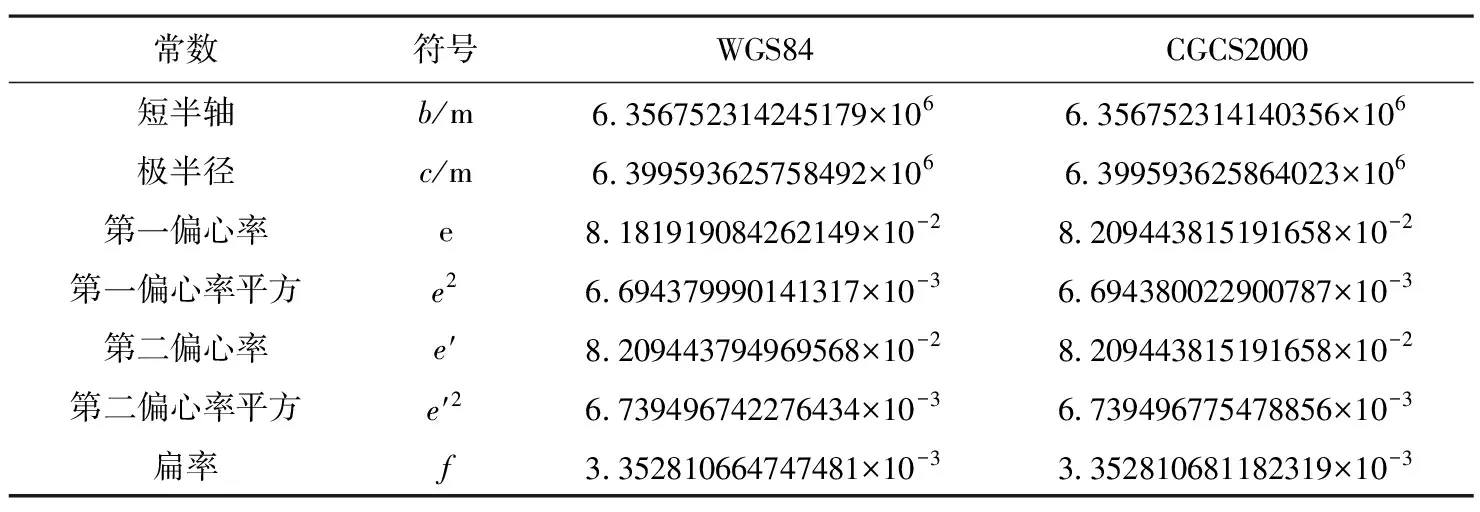
表2 CGCS2000椭球与WGS84椭球推导的几何参数
通过战前情报侦查预先获得岸上目标的经纬度和高程坐标(Lt,Bt,H)装入火控设备中,舰艇综合导航系统采用GPS(WGS84坐标)[6]或“北斗”(CGCS2000坐标)卫星定位仪实时提供我舰定位数据(Lw0,Bw0),(Lw1,Bw1),…,(Lwi,Bwi)…,并送给舰炮火控设备,火控设备通过接收目标和我舰的大地数据,求取相对距离、目标方位和高度(d0,β0,H0),(d1,β1,H1),…,(di,βi,Hi),解算射击诸元对目标射击。由于我舰综合导航发送的数据与火控解算周期不一致,需要将求取的距离和方位信息进行加密后平滑滤波处理。
初始计算目标的初始坐标
(1)
进一步外推。无综合导航数据更新时,使用外推数据进行更新
(2)
当第l次有综合导航数据更新时,按式(3)外推,重新计算我舰机动参数
(3)
其中N表示综合导航数据更新时对应的火控解算周期数。

(4)
1.2 利用弹道测量校射方法实现对岸落点预测
1)弹迹指示
使用测速雷达获取弹丸初速和弹丸出炮口时刻,根据探测的弹丸初速可得到实际弹丸初速与装定弹丸初速的偏差。依据弹丸出膛时刻的指向计算弹丸在空间中的外弹道坐标,作为理论的基准弹道:根据弹丸出膛信号,计算出膛时刻相对解算周期初始时刻的时间差ΔT,由时间差得到舰炮击发时刻的舰炮指向架位(rp,φp)以及摇摆数据(ψ,θ),求取弹丸出膛时刻稳定的舰炮指向数据(βq,φ),然后根据舰炮指向数据、补偿时间以及弹道气象参数,测速雷达测量的实际弹丸初速,求取理论弹道数据,得到向跟踪雷达发送的弹迹目标指示数据。
2)弹道积分落点预测

将预测的弹丸落点坐标转换到球坐标系(Dc,βc,εc)与目标点坐标(Dm,βm,εm)进行比较,得到此发弹丸的距离、方位和高低偏差,多发射击时采用偏差平均值。
利用雷达跟踪发射弹丸,通过观测弹丸的飞行轨迹坐标,进行射击校正量计算,解决远程对岸射击校正问题[7-8]。考虑到弹丸跟踪特性,上升段时跟踪雷达仰角高,能够克服多路径和低角影响,且弹丸回波强,跟踪平稳,在作战使用时采用了弹道上升段进行弹迹跟踪。
1.3 无人机图像视频误差定位原理
岸上非机动目标通常具有共同的属性,均有一个确定的实时地理坐标,因此,只要能够实时确定岸上目标和我舰的精确地理坐标,对岸射击的火控计算问题就迎刃而解。通过将侦察图像与具有定位信息图片进行图像配准,可以使得武器系统具有自主的对岸上目标的实时精确定位和射击校正能力。对岸上靶标作战时通常会选择区域进行打击效果评估,可战前预先设定一些参照点并进行大地测量,建立参照点与大地测量的映射函数[9]。电视侦察设备开始工作后,由操作手在适当时机对连续图像进行冻结,再从冻结图片中完成与参考图片进行匹配定位功能。
作战使用时,当观测到炸点图像,通过人工按压图像中心,得到图像像素点坐标,并在参考点进行插值,可获得目标(炸点)坐标为大地坐标系下的坐标,即:经度、纬度和高程三要素。而岸上目标的坐标战前已经预先装订至设备中,计算炸目偏差,并将其转换到火控系统所用的坐标系中,从而完成绝对坐标向相对坐标的转换,根据偏差结果评估系统的打击精度。
2 实弹射击情况分析
在某次舰炮对岸进行经纬度射击试验时,射弹6发,采用雷达跟踪弹迹,火控预测落点方式进行射击校正。火炮采用低射速,预先距离修正量-480 m,方向修正量-8 mrad。
跟踪雷达共跟踪了6发弹的弹道,火控根据弹丸出炮口信号预测弹丸指示数据给跟踪雷达做指示波门,首发弹提前预置波门,依据后续弹丸出炮口信号,火控转入下一发弹丸的弹迹指示,控制雷达撤消跟踪,重新调舷捕获。火控根据跟踪的弹道数据预测了落点,火控系统工作正常。
通过实时测量出炮口信号并向火控提供弹动零时指示信号,初速测量雷达进行弹道测量,实时计算弹丸空间速度并外推到弹丸出炮口时刻的速度值,需要一定的时间积累。该次射击弹丸出炮口信号统计情况见表3。在射速间隔4 s情况下,测速雷达要实时给出弹丸测量值约0.54 s。火控解算时由于该发弹丸还未出膛,使用的是弹丸预测值,预测弹迹则根据测速雷达测量的实际情况,落点计算采用的是弹丸测量值。

表3 弹丸出炮口信号统计结果(单位:s)
弹丸落点与火控预测偏差趋势一致。无人机测量的6发弹迹偏差视频截图如图1所示。
6发弹的方向偏差和距离偏差及初速测量情况如表4所示。

表4 火控预测方向距离偏差及测速雷达初速度情况
2.1 射击瞬间火炮跟踪误差分析
选取射前0.1 s,射后0.4 s的火炮架位与诸元的数据进行误差比较,统计射击瞬间火炮振动对预测的影响,见图2、图3。
射击瞬间高低、方向偏差变化可达0.06°,说明射击振动对落点偏差有影响,这与舰炮射击时的跟踪精度相关。图2中方向偏差从大到小按射弹序号依次为⑤③①②⑥④与火控预测一致。
2.2 无人机定位炸点精度分析
根据无人机图片的炸点坐标估计的偏差。图4、图5分别表示通过无人机定位图片计算与火控预测的方向和距离偏差的示意图,二者吻合度较好,图5中从距离偏差上看,存在一个系统误差,该系统误差的精确度高,说明了对岸射击火控弹迹预测的可行性。
2.3 经纬度目标定位精度分析
对岸直接瞄准射击时,跟踪雷达实时测量靶标瞄准中心坐标,靶标经纬度坐标事先已经计算好,根据我舰经纬度坐标和雷达激光测距数据可以得到两个距离及其误差曲线。
经纬度定位精度也是影响对岸预测精度的一个原因,从图6可以看出,经纬度计算的目标距离与激光测距的距离在剔除射击过程中激光测距受烟雾、射击振动影响因素,二者初始约130 m,射击过程中约50 m。
2.4 高空弹道气象精度分析
在舰炮对岸远程打击时,因高空气象信息保障困难,通常只能提供舰面条件下的气温、气压、相对湿度、风速、风向。而求解射击诸元和弹道指示时通常要考虑虚温、气压随弹道高度[10]的变化。虚温、气压因素影响弹道解算的声速和空气密度值,风速影响方向和距离精度。因此对岸远程射击时高空气象是影响解算精度的重要因素。
图10、图11分别展示了实际虚温与舰面虚温、实际气压与舰面气压随高度的分布曲线,图12则展示了实际风速风向随高度的分布曲线。在低空(3000 m以下)时二者吻合度较好,高空时明显偏离理论分布原理,影响射击精度。射击试验时,采用高空气象数据与舰面气象数据进行弹道仿真计算,在10 km、14 km、23 km 距离对岸射击时方向偏差分别为4 mrad、8 mrad、40 mrad,距离偏差分别为150 m、350 m、1800 m。
3 部队作战使用研究
根据目标经纬度和我舰定位计算射击诸元,由跟踪雷达跟踪一段弹道,并根据该段弹道预测落点在计算机仿真方式下结果符合性较好[11]。但在实际射击过程中按照此种方法预测的落点与多种因素有关,如目标定位精度、跟踪器的跟踪精度、火控解算精度(如滤波的弹丸速度精度与弹丸飞行时间关联,火控跟踪的输入包括跟踪器的跟踪精度)、舰炮跟踪精度、弹丸初速测量误差、实际气象误差、弹丸散布,若知道对应每发弹的落点与目标的偏差,再复合一下火控预测的落点偏差,进行多发统计后的偏差是一个系统误差,可以在系统使用时进行修正。

表5 对岸目标射击主要误差源分布
在采用对岸射击偏差校正时应考虑偏差统计的置信水平,置信度水平是指总体参数值落在样本统计值某一区间内的概率,而置信度区间是指在某一置信水平下,样本统计值与总体参数值间的误差范围。置信区间又称估计区间,是用来估计参数的取值范围的,常见的有52%~64%,或8~12,就是置信区间。置信区间与样本量相关,在置信水平相同的情况下,样本量增多,置信区间变窄,由于大口径舰炮射击炮弹数较少,样本量较小,通常选择置信度水平为80%,一般不应超过90%。
置信度水平的计算公式如下
P(t1 (5) 其中,α为置信度水平,[t1,t2]为置信度区间,分别表示置信度的上限与下限。 根据数理统计的相关知识,当已知统计的方差σ2的估计值S2时,则估计区间为 (6) (7) tα(n-1)可按参考表6计算。 表6 置信度与采样点计算表 大口径舰炮对岸射击多为小样本射击,因此根据式(7)按置信度90%计算得到的方向偏差量的置信区间 (8) 距离偏差量的置信区间 (9) 依据上述计算结果,方向上可以按0.7 mrard修正,距离上按84 m修正。 本文以大口径舰炮对岸远程目标射击为背景,利用经纬度大地测量的成果,综合利用舰炮武器系统的跟踪雷达、测速雷达等测量设备,通过火控进行弹迹指示,雷达跟踪预测弹丸落点的方式实现对岸射击校正。同时,结合实际射击试验,考虑了主要因素对射击精度的综合影响,在对应置信度和置信水平的前提下,给出了数理统计的偏差计算的相关方法和简化经验公式,为部队远程对岸射击校正提供了技术支撑。同时在对岸远程目标作战时应重视高空气象信息的保障。
4 结束语
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:28:04
军事文摘(2021年16期)2021-11-05 08:49:08
军事文摘·科学少年(2021年8期)2021-09-10 21:28:31
空间科学学报(2021年6期)2021-03-09 06:20:16
文苑(2020年5期)2020-06-16 03:18:14
意林·全彩Color(2019年11期)2019-12-30 06:08:40
装备制造技术(2019年12期)2019-12-25 03:07:32
星星·诗歌原创(2019年10期)2019-10-28 05:39:42
延河·绿色文学(2017年3期)2017-05-04 00:58:24
太空探索(2016年12期)2016-07-18 11:13:43
