
自主行走拖拉机道路识别与路径导航
——基于激光扫描测距
2018-08-10 10:58陈玉楼
农机化研究 2018年9期
陈玉楼
(洛阳职业技术学院,河南 洛阳 471003)
0 引言
实现拖拉机导航的方案有很多:如用于轨道、垄沟行走的方案,这种方案要求道路具有特定的构型;磁条/色带引导行走的方案,这种方案则要求道路上设有引导带,如果将这些方案使用在自主导航拖拉机设备上,均存在一定局限性,难以引导拖拉机进行灵活的自主移动。相比之下,用于无明显引导标志的普通路面的导航方案具有突出的环境适应性强的特点,受到了许多学者的关注。通常该类方案的核心算法分为两部分:一部分为道路边缘提取;另一部分为导航方向控制指令生成。道路边缘的提取本次采用了激光测距扫描的方法,而航向采用了Sobel算子方向角比对的方法,最后通过控制左右轮的速度,实现航向的控制。
1 自主行走拖拉机总体设计
基于路径识别的拖拉机自主行走驱动方法较多,常用的是中心线算法,但这种算法具有一定的局限性。在实际作业时,田间不可能划分太多的中心线,如果设计一种方案可以直接将道路和农作物区分开,在行走时有效避开农作物,可以大大提高自主行走的能力和导航的效率。利用激光测距扫描的方法,可以实时地对路面和前方障碍物情况进行扫描,当遇到障碍物时,激光扫描得到的波形会剧烈变化,利用这一原理,可以实现路径识别和导航,如果将其使用在自主导航拖拉机设备上,可以有效提高导航效率。其基本框架如图1所示。
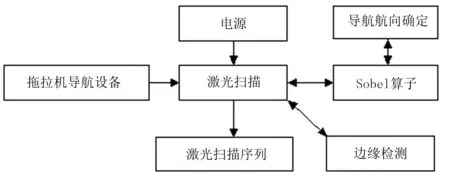
图1 基于激光测距的拖拉机导航设计框架
将激光测距扫描仪安装在拖拉机自主导航设备上,可以有效区分道路边缘和作物的边缘,利用Sobel算子可以标定图像的方向角,为方向导航提供准确的信息,其导航的基本流程如图2所示。拖拉机路径识别主要利用激光扫描测距的方法,通过激光扫描波形的反馈,可以区分道路和农作物,然后对扫描图像进行比对,利用Sobel算子,得到基本的航向角,最后完成路径识别和导航。
2 基于激光测距的道路识别与路径导航算法
基于激光测距在进行道路识别时,由于道路两旁有农作物,在扫描到道路和作物时,会呈现出不同的特点,这是由于道路的地势较为平坦,因此扫描得到的波形波动性会较小。当扫描到农作物时,由于农作物形状并不平坦,得到的波形波动会比较大,拖拉机可以根据激光测距扫描反馈回来的波形,识别道路,并进行自主导航。为了使拖拉机通过激光测距扫描得到更加精确的道路识别信息,利用图像处理的方法,对图像背景进行去除,保留关键信息。假设通过扫描得到数据为A,去除的扫描背景为B,去除后的数据为C,则有
C=A-B
(1)
其中,A表示拖拉机在理想的水平面上扫描得到的数据。因为在农田环境下,很难找到理想的水平面环境,于是将拖拉机放置在理想的实验环境下,激光扫描得到的激光序列如图3所示。

图2 拖拉机路径识别和导航基本流程
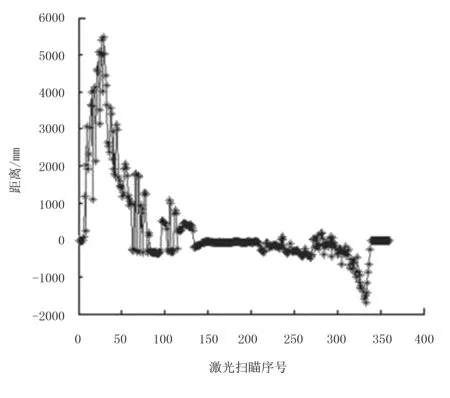
图3 激光扫描序列
由图3可以看出:在扫描到道路时,其波形比较平坦,变化较为缓慢,而当扫描到农作物时,波形会出现剧烈的波动,从而可以有效地区分道路和农作物。
采用二值化处理可以增强图像的关键信息,使得到的结果更加准确。在进行二值化时,可以将前景值点灰度值设置为255,背景点灰度值为0,在r×r邻域内,二值化计算公式为
T(x,y)=m(x,y)+k·s(x,y)
(2)
其中,T(x,y)表示像素点的阈值;m(x,y)表示像素点的均值;s(x,y)表示像素点的标准差;k表示修正系数。假设像素点(i,j)处的灰度值为f(i,j),则
(3)
(4)

(5)
导航方向采用计算比对的方法,计算比对算子有很多,本次主要使用的是Sobel算子,Sobel算子在许多图像处理软件中都有所集成,在进行亮度比对方向角度时,其误差较小。水平和垂直方向的Sobel表如图4所示。
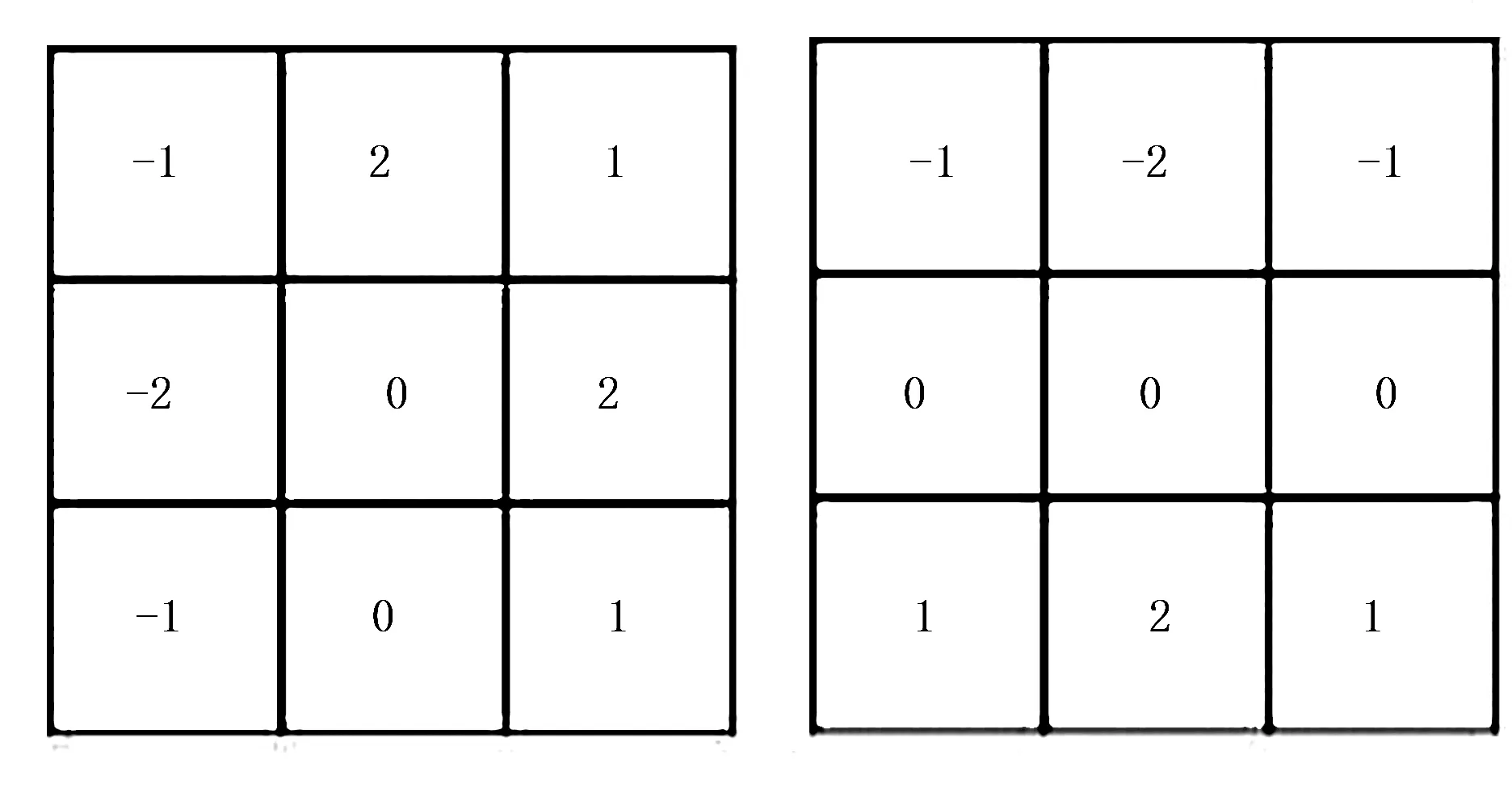
图4 水平和垂直方向的Sobel表
利用像素点旁边的8个像素进行验算,然后求出导航方向角度,其符号用cxy表示,是θxy量化Δθ后,根据符号数N比对的符号,其表达式为
(6)

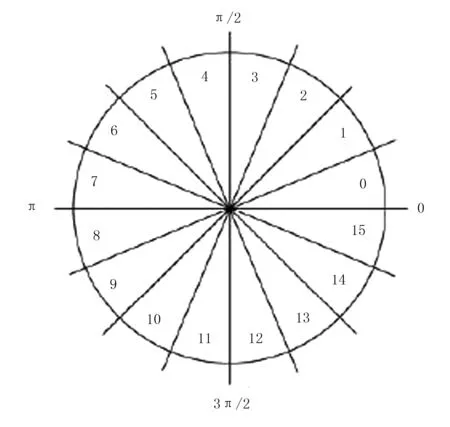
图5 方向符号化量化幅度选值表
由图5中选择对比值之后,利用Sobel算法确定基本的航向,确定好航向后,转换为拖拉机的左轮和右轮不同的速度之差,从而控制拖拉机沿着正确的方向行走。
3 拖拉机道路识别和路径导航实验
为了验证激光测距在拖拉机道路识别和路径导航上使用的可行性,在实验室环境中,创设了拖拉机田间仿真环境,并在拖拉机模型上安装了激光测距仪,进行了道路识别和路径导航实验,如图6所示。
为了仿真理想的农田作业环境,使扫描的垄间较为平坦,采用了理想的实验环境、在农机模型上安装了激光扫描设备,农机模型如图7所示。
在模型上安装了激光扫描仪,然后利用航向符号比对进一步提高导航的准确性。通过实验测试,得到了如图8所示的结果。

图6 拖拉机模型道路识别和路径导航实验

图7 实验导航拖拉机模型

图8 拖拉机导航测试结果
首先对简单的单垄间行走进行了测试,结果表明:拖拉机可以准确按照图中叉号所表达的位置完成自主导航。为了进一步研究其导航的可靠性,利用复杂的多垄间行走对拖拉机进一步地进行了测试,得到了如图9所示的结果。

图9 复杂作业环境的导航实验
为了增加导航的难度,采用跨垄间导航实验,对拖拉机导航的准确性进行验证,结果表明:利用激光扫描技术,拖拉机可以准确地完成复杂的多垄间行走自主导航。
为了进一步验证基于激光扫描的拖拉机自主导航算法的优越性,对传统方法和激光测距导航算法得到的道路识别与路径导航误差进行了对比,如表1所示。由对比结果表明:采用激光扫描测距导航算法得到的路径识别的误差更小,导航更加准确。

表1 道路识别与路径导航误差统计
4 结论
为了提高拖拉机的导航效率,基于激光扫描测距和Sobel算子,设计了一款准确性较高的拖拉机自主路径识别和导航的方案,并对该方案进行了验证。通过激光扫描,可以有效地区分开道路和农作物,得到了准确的道路边缘,道路边缘的提取确定了拖拉机的移动方向,确保了拖拉机一直沿着道路行走,不偏离道路区域而碾压农作物。利用机器视觉确定航向,进一步提高了导航的准确性,相比传统算法,其导航的误差降低了一倍以上,具有较高的导航精度,因此将基于激光扫描测距和机器视觉两种方法应用在拖拉机自主导航方案上,对于提高导航准确性和导航效率具有重要的作用。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
高校应用数学学报A辑(2022年2期)2022-06-21
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
校园英语·上旬(2020年1期)2020-05-09
小学生必读(低年级版)(2019年3期)2019-07-08
儿童故事画报(2018年4期)2018-05-21
制导与引信(2017年3期)2017-11-02
卷宗(2017年16期)2017-08-30
电脑知识与技术(2016年7期)2016-05-19
