
一种无位置传感器PMSM快速平滑起动方法
2018-08-09 08:30:24殷理杰张义兵
微特电机 2018年7期
殷理杰,张义兵
(湘潭大学,湘潭 411105)
0 引 言
永磁同步电机(以下简称PMSM)因为其体积小、质量轻、过载能力强等优点,在工业生产及家用电器中得到越来越广泛应用。为了能够充分发挥PMSM的优越性,通常会采用磁场定向控制算法,该算法中的坐标变换需要转子的准确位置信息。安装位置传感器一方面会增加PMSM使用成本;另一方面,由于位置传感器对工作环境有严格的要求,安装后会降低PMSM对环境的适应能力。因此,对PMSM的无位置传感器控制方法的研究一直是电机控制领域的热点[1,2]。
现阶段已有的无速度传感器矢量控制算法主要分两种:一种是利用电机运行过程中的反电动势进行估计;另一种是利用转子的凸极效应。两种方法中,前者主要应用于电机中高速旋转时,转速低时,由于反电动势太小,不能用来估计转子位置;后者则适合于低速甚至是零速时的转子位置估计,但是受电机结构的限制。
文献[3]中,电机起动阶段使用I-f半闭环控制,中高速全闭环的控制方式,使用电流变斜率变化的状态切换策略,能够满足速度平滑切换的需求。但如何选择合适的斜率是该策略的难点。
本文研究一种过渡状态中电流调节与转子角度平滑切换相结合的方法,能够缩短切换过程时间,降低参数选择难度,提高对不同电机及不同负载的适应能力。
1 基于SMO的PMSM模型
在α,β坐标系下,PMSM的数学模型可以描述:
eα=-keωrsinθ;eβ=keωrcosθ(2)
式中:eα,eβ表示α,β轴的反电动势;ke为反电动势系数;ωr为电机转子转速;θ为转子位置角度;iα,iβ,uα,uβ分别表示α,β轴的电流和电压。
由式(2)可知,反电动势是与转速成正比且包含转子位置信息的正弦信号。如果得知定子的反电动势信息,就能够从中提取出转子的实时位置θ和转速ωr。
根据式(1)和滑模变结构理论,则可以构造如下SMO:
式中:k为滑模系数;sgn(x)为符号函数,x>0时,sgn(x)=1;x<0时,sgn(x)=-1;x=0时,sgn(x)=0。
2 双过渡状态起动控制策略
2.1 初始状态控制过程
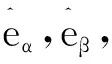
电机起动初始阶段,先给定子绕组足够大的电压矢量,从而确保转子位置已知。初始位置确定后,则可以进行I-f控制起动。图1中d*,q*坐标系为其起动时的旋转坐标轴[4],d,q坐标轴为转子同步旋转坐标轴。根据电机电磁转矩公式,则有:

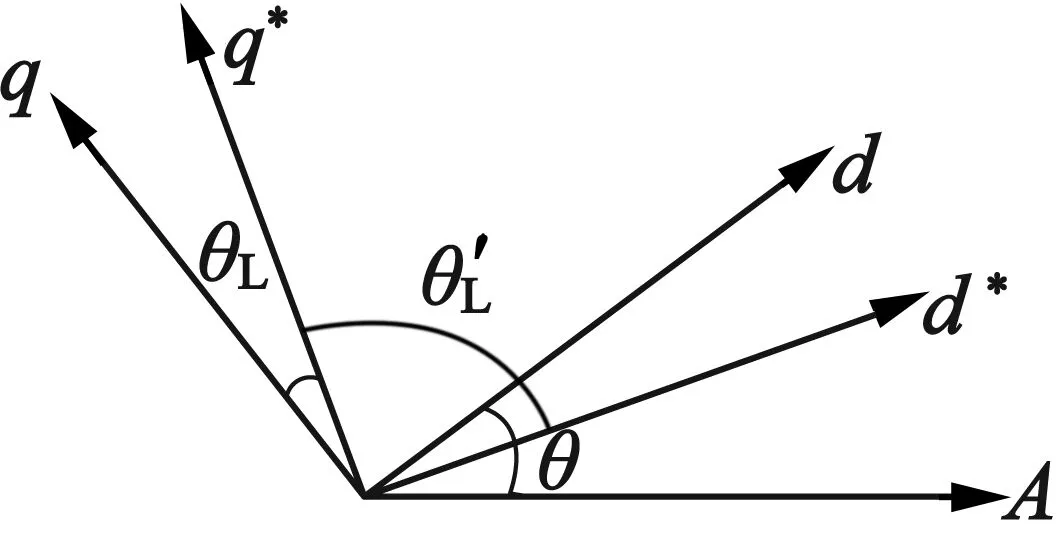
图1 起动阶段坐标轴
2.2 双过渡状态控制过程



2.3 全闭环控制
图2为系统框图,开关1为I/f半闭环控制、开关2为全闭环控制。全闭环控制状态时,速度环节中以估测的转速作为负反馈信号,与设定转速的误差作为PI调节的输入。电流环节采用id=0的控制方式,实现电流向量与磁场向量的完全解耦,简化控制过程。

图2 控制系统框图
3 系统实现
3.1 系统硬件实现
硬件方案设计上,选用TI公司TMS320F28335为处理器;霍尔电流传感器选用Allegro公司最大量程-5~+5A的ACS712;智能功率模块(IPM)为FairChild公司最大电流10A的FSBF10CH60B;隔离器件选用ADI公司使iCoupler技术的ADuM1400系列隔离器件,易用性和稳定性都较普通光隔离器件有明显优势。图3为系统硬件框图。
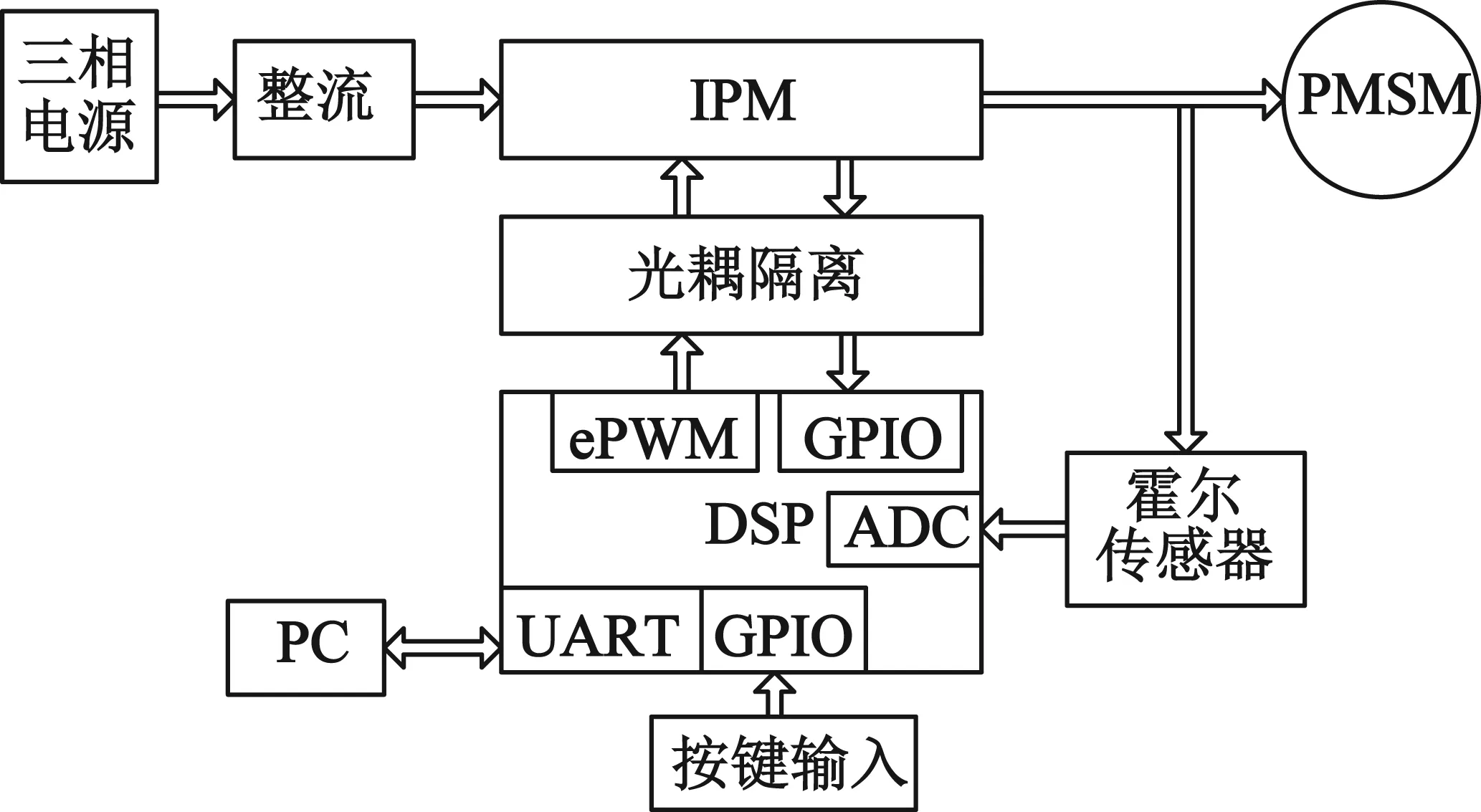
图3 系统硬件框图
3.2 系统软件实现
系统软件主要包括主程序、ePWM定时器中断服务程序(以下简称ISR)、ADC转换完成中断ISR、SMO程序、外部中断ISR等。主程序主要实现DSP初始化、外围器件初始化及系统参数设置、中断向量表配置等。由于系统功能的性质,需要使用到多个ePWM功能单元,其中1个ePWM配置成普通定时器功能,该模块的ISR主要处理系统处于过渡状态的控制。另外需要3个ePWM单元配置成10kHzPWM输出,并且根据IPM的动态性能参数,添加5μs的死区时间。该组ePWM模块的事件管理功能还需要输出片上ADC起动触发信号。
SMO程序和矢量控制程序将在ADC转换完成中断ISR中执行。外部中断ISR用来响应IPM的过压过流等错误报警。配置完成后,主函数即可以进入等待中断状态。
ePWM定时器将在电机进入全闭环控制之前对电机实施控制,因此,定时器服务函数是整个软件系统中,最为关键的部分。图4为ePWM定时器中断服务函数的流程图。
进入全闭环控制后,ePWM定时器中断关闭,控制过程由ADC转换完成中断函数完成。ADC定时器开始转换触发条件,继续由ePWM提供。

(a) I-f起动过程流程图

(b) 过渡状态的I-f控制图4 ePWM定时器中断服务程序流程图
4 实验结果
实验电机为极对数为2,额定功率1kW,额定转速3 000r/min的表贴式PMSM,电机实际安装有绝对值编码器,编码器检测的实际位置信息作为对照参考。对于不易于直接使用示波器测量的波形,采取DSP采样并存储到片上RAM中,采样过程结束后,通过串口发送至PC,使用MATLAB绘图的方式。整个实验平台如图5所示。
电机工作过程中,示波器测量线电压波形如图6所示。

图5 实验平台照片

图6 线电压波形
实验过程中,先使用上述策略起动电机,进入全闭环控制后,在1.8s时刻将设定转速提高到 2 000r/min。全过程速度及三相电流波形如图7所示。
该速度波形为记录编码器数据用MATLAB绘图得到。整个速度曲线可以分为4个阶段,第1阶段为I/f起动阶段,在速度曲线上体现为从电机停止到1 000r/min的加速阶段;第2阶段为过渡阶段,该阶段从0.4s持续到1.55s,该过程的2个过渡阶段确保了转速的稳定;第3阶段为进入了全闭环控制,转速维持在1 000r/min的阶段;第4阶段为设定转速提高到2 000r/min后,电机在全闭环控制下的加速过程。对比第1阶段和第4阶段的加速过程,第4阶段由于使用全闭环控制,有更优秀的加速性能。电流波形同样可以看出类似4个阶段,恒定3A的起动阶段;过渡阶段电流缓慢减小;在切换到全闭环控制时电流抖动,以及设定转速提高的全闭环加速阶段,到最后维持2 000r/min的恒速工作阶段。
图7 转速和电流波形
在整个实验过程中,给定转子位置与转子估计位置的差值,与q轴电流有密切的关系,因此将2条曲线一起绘制,以方便分析。如图8所示。

图8 iq及坐标系差值波形
图8中,iq对应上方曲线,坐标系差值对应下方曲线。I/f起动阶段,q轴电流一直维持在设定的3A,该过程中,由于I/f控制有一定的自适应性,坐标轴误差显著降低。在第1过渡阶段,由于iq持续减小,只有当给定坐标系与真实两相坐标系间的夹角减小,才能保证电机转速的稳定,因此在该阶段内,坐标误差持续减小。在第2过渡阶段,由于需要切换控制策略,所以引起了电流抖动,在此过程后,2个坐标系重合,误差为0,系统进入全闭环控制状态。之后在1.8s处,设定转速提高至2 000r/min,有iq直接提高到设定最大电流3A,以追求最大加速度,约在1.85s时刻,电机达到设定转速,iq回落到约1A,维持2 000r/min运转。
对于带负载情况,如图9所示。当电机的负载为1N·m时,电机依然可以完成起动,并且切换过程完成的时间明显缩短。维持2 000r/min的转速,需要使用2.6A的电流,已接近限定的最大电流。
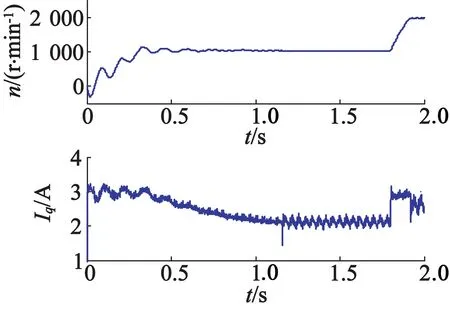
图9 转速及iq波形,1 N·m负载
5 结 语
本文研究的双过渡状态无位置传感器PMSM快速起动策略能够在拖动不同负载的情况下起动,并且能够在减小过渡状态时间的前提下稳定地进入全闭环工作状态。该策略适合起动负载不确定的情形,能够实现电机的快速平滑起动。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年11期)2018-08-04 03:25:58
时代英语·高二(2017年4期)2017-08-11 11:54:16
解放军健康(2017年5期)2017-08-01 06:27:44
电测与仪表(2015年3期)2015-04-09 11:37:38
赤峰学院学报·自然科学版(2012年19期)2012-10-14 02:54:02
微处理机(2012年4期)2012-06-13 11:32:24
