智能调度系统在缅甸莱比塘铜矿项目的应用与研究
2018-08-07 08:24李健,侯彦君,刘卓
四川水力发电 2018年3期
李 健,侯 彦 君,刘 卓
(中国水利水电第十工程局有限公司 国际公司,四川 成都 610072)
1 概 述
莱比塘铜矿位于缅甸实皆省(Sagaing)南部,距蒙育瓦(Monywa)直线距离约5 km,公路里程约26 km;矿区地理坐标为:北纬22°07',东经95°02',矿坑面积约6 km2。
莱比塘铜矿矿体位于两山及中间沟谷下,为隐状矿床,矿体整体呈一个顶面平整的金元宝形,南北走向长约2 200 m,宽约1 400 m,产状基本水平,矿体平均厚度约140 m,平均品位为0.38%。莱比塘铜矿为特大型露天矿山,采用分区分期开采的技术方式,生产期设计年采剥总量为6 900万t,其中废石剥离量为3 865万t,采矿量3 035万t,破碎、堆浸日处理矿量为92 kt/d,湿法炼铜生产能力为100 kt/a阴极铜,为亚洲第一大铜矿。该项目生产期为33 a,其中投产1 a,达产30 a,减产2 a。
露天矿山生产过程中一般具有采剥周期较长、采剥工程量大、设备种类和数量繁多的特点。如何合理地调度设备、了解设备每时每刻的运行状态、提高生产效益、降低生产消耗、提升露天矿山的管理水平成为采剥生产管理的一大难题。因此,有必要采用新的科学技术对露天矿山生产过程及运行状态进行监控管理。
2017年前,缅甸莱比塘铜矿项目的现场管理主要是通过手持对讲机、由有经验的管理人员现场协调沟通的方式进行设备调度,这种方式虽然有效,但其具有很多不足与缺陷:
对车辆设备等的状况、空间位置不了解,调度过程中存在车铲不匹配;
调度工作量大,耗费的人力、物力较大;
调度指令误差导致生产消耗及运营成本的增加;
调度时间及周期较长,大型设备联合作业的效率不能实现最大化;
调度车辆及人员频繁出入矿坑增加了安全风险;
对设备运行状态无法实时监控;
数据统计存在误差和漏洞,不能准确地为生产管理和决策提供可靠的依据。
从2017年开始,莱比塘铜矿项目的工作已进入生产期,采剥生产规模即将达到6 900万t/a,目前项目部共有铲装及辅助设备100多台(套),其中有53台TR100/91 t、10台NTE260/236 t和11台挖掘机(2台6.5 m3、3台11 m3、4台12 m3及2台22 m3)及6台φ250牙轮钻,如此多的设备势必导致生产管理及调度更加复杂和困难。为解决上述问题,提高生产效益,降低生产消耗,提升露天矿山的管理水平,项目部于2016年12月引进了辽宁丹东东方测控GPS卡车调度系统,目前已建成科学智能的计算机智能调度系统并用于统筹管理现场生产,确保了大规模生产的全局统筹管理、生产实时监控和动态优化调度,以满足矿山的发展需求。
2 卡车调度系统的基本情况
卡车调度系统通过采用全球卫星定位系统(GPS、北斗等)、计算机及网络技术、无线数字通讯技术、矿山系统工程及优化理论、地理信息系统技术(GIS)、电子技术等高新技术,对传统的人工调度系统及管理体制进行了改造,通过采集生成设备动态信息,实时动态监控和优化调度卡车、铲及主要辅助设备的运行,集成信息化、智能化、社会化的新型现代化智能调度控制系统和全方位的采矿生产管理控制智能化决策平台。该系统可以实现对矿山数字化、智能化和可视化的管理,为露天矿山的生产管理带来全新的变革。
该卡车调度系统主要由硬件和软件两大部分组成,其硬件包括车载智能终端、中控计算机系统、LTE无线通讯系统和全球卫星定位系统;软件是由丹东东方测控公司研发、用于调度人员进行监控和管理的操作平台。
2.1 车载智能终端系统
该系统的车载终端主要由电脑主机、LTE通讯单元、定位天线、通信天线、车载电源组成,分为挖掘机高精度终端和卡车低精度终端两种。主要负责采集和上传实际生产过程中设备的车速、油量等重要信息。
2.2 服务器系统
卡车调度系统的服务器系统按照主服务器、备用服务器、共享存储的方式设计,该方式被称为“Active-Standby”。这种方式既能满足服务器有物理性冗余的要求,又满足同时在线的要求。
莱比塘铜矿卡车调度系统采用的是由微软公司提供的Windows Server故障转移群集(Failover Cluster)和SQL Server方案。当Active Server出现故障时,系统将在2 min内自动切换到standby Server,以满足系统的不间断运行需求。
2.3 LTE无线通讯网络系统
通讯网络系统是卡车调度系统的信息传送通道,无论对稳定性还是带宽都有着严格的要求。莱比塘铜矿卡车调度系统首次引进了目前较为先进的LTE无线通信网络作为系统的数据传送通道。
LTE网络相对于以往使用较多的MESH无线网络具有突出的优点:
(1)高带宽:具有宽频、用户开发数量大的特点,其频宽可达20 MHz,能达到下行80 Mbps,上行30 Mbps的传输速率,有利于无线语音系统的拓展。
(2)可单站组网:单基站设备即可实现组网,All in One无线接入系统(含基带、射频以及核心网功能)架构简单,可操作性强。
(3)高覆盖范围:相对于MESH,莱比塘铜矿400 m频段的LTE网络覆盖距离可达20 km以上。
(4)高可靠性:基站取消了电路域,取消了无线网络控制器,结构一体化,可靠性高。
2.4 全球卫星定位系统
定位是卡车调度系统中尤为重要的一部分。莱比塘铜矿采用了目前最为流行的北斗+GPS双星定位模式,使其定位高效、准确,北斗与GPS之间任何一部分出现问题均能迅速切换,从而不影响系统的正常使用。
3 卡车调度系统的工作原理
3.1 调度理论
卡车调度系统是综合运用计算机技术、 现代通讯技术、全球卫星定位(GPS)技术、系统工程理论和最优化技术等先进手段建立的生产监控、智能调度、生产指挥管理系统,对生产采装设备、移动运输设备、卸载点及生产现场进行实时监控和优化管理,优化了卡车运输,降低了总运距和采装与运输设备的等待时间,节能降耗,有效提高了采装与运输效率;实现了液压铲、卡车、钻机调度,优化了生产,合理配矿,提高了资源利用率;能够及时应对生产中出现的突发事件,以实现及时响应生产、及时调整生产和安全生产的目的。卡车调度系统通过采用现代高新技术和符合露天矿山生产实际的最优化模型,彻底改变了传统的生产管理模式,是露天矿山生产管理模式的一场革命。
3.2 系统工作过程
该系统通过自动采集设备状态、设备位置、自动统计液压铲装车能力、卸点卸载能力、路径运行时间,得到系统优化技术的数据基础,再结合人工设定的现场规划和生产计划完成优化计算,在优化计算后给出当前条件下的最优调度方案;若不满意,还可进行人工干预。
4 自动调度系统的算法设计与实施
4.1 概 述
莱比塘铜矿卡车调度系统的主要思路是动态规划。所谓动态规划,就是一种用于处理多阶段决策问题的数学方法,它可以将复杂的多阶段决策问题转化为一系列比较简单的最优化问题,特点是优化过程中具有多阶段性。其解决问题的步骤是先把一个比较复杂的问题分成彼此相互联系的若干阶段,所形成的每个阶段定为一个子问题,待规划好问题后逐个解决问题,待每个问题解决后,整个问题的决策也就确定下来。每个阶段都用时间表示,因此将其定义为“动态”过程。
4.2 调度原则
莱比塘铜矿项目优化调度的准则主要是以提高车铲运转效率、达到提高整个矿山产量为主要目标。其遵循以下几个原则:
(1)最早装车法(Earliest Loading)。
将当前需要调度的卡车派去能够最早装车的液压铲。
(1)
式中i*为当前卡车将被派往的液压铲号;N为该调度点所属的液压铲总数量;Tti为预计待调度卡车到达i号液压铲的时刻;Tsi为i号液压铲装完所有配给它的卡车后的时刻。
(2)最大卡车法(Max Truck)。
将当前需要调度的卡车派去等待装车时间最少的那台液压铲。
i*=i|{max(Tsi-Tti,0)}|
(2)
(3)最大液压铲法(Max Shovel)。
将当前需要调度的卡车派去预计等车最久的那台液压铲。
i*=i|{max(Tti-Tsi,0)}|
(3)
(4)最小饱和度法(MSD)。
将卡车派去饱和度最小的那台液压铲。
i*=i|{DS(i)}|
(4)
其中:
DS(i)={TS(i)+NC+ATL(i))/(TA(i)}
(5)
式中TS(i)为预计卡车剩余装载时间;NC为道路中的卡车数量(除去正在装的卡车);ATL(i)为i号液压铲的平均装车时间;TA(i)为卡车从调度点到i号液压铲的运行时间;DS(i)为调度地点到液压铲i的卡车饱和度。
(5)最小饱和程度及兼顾卡车运行周期法(MSDTC)。
它是在卡车最小饱和度的基础上考虑卡车的运行周期。
i*=i|{DS(i)}|
(6)
4.3 调度算法工作过程
该系统采用的智能调度算法抛弃了简单的算法和试凑法,将若干个精确算法结合在一起分步求解。智能调度包括3个子系统:最佳路径子系统 (BP);车流规划子系统(LP)和实时动态调度子系统(DP)。派车原理见图1。
(1)BP:最佳路径子系统主要生成道路网络中的最佳路径。通常利用 Dijkstra、Floyd 算法等方法计算道路网中任意点到其他各点的最短路长。
(2)LP:车流规划子系统通常以产量最大、出动设备数量最少、运营成本最低等为目标,根据最佳路径,综合考虑液压铲的能力、卸点能力、汽车的数量、各个运输环节的统计时间、配矿要求、液压铲优先级以及其它生产约束,通过线性规划,求取各装、卸点之间的卡车运量分配。
(3)DP:实时动态调度子系统以车流规划结果为基础,统筹所有液压铲、卸点、重车和空车的实时运行状态,在满足生产中各种约束条件的情况下,为每台空车指派最合适的目标液压铲,为每台重车指派最合适的目标卸点。
5 卡车智能调度系统取得的经济效益和应用前景
卡车智能调度系统可以彻底改变定铲定车的配车模式,其目的主要是通过减少矿山卡车、液压挖掘机的非生产性的怠滞时间,利用计算机软件合理地调配车辆,充分利用已有的车铲去提高生产能力,尽量做到车不等铲,铲不压车和欠车,实现车铲匹配,最大程度地发挥铲、车的生产能力,从而达到降低生产成本或节省投资费用的目的。一般来讲,运用卡车智能调度系统(图2),可以使矿山生产能力提高5%左右。
卡车智能调度系统可以运算出为满足生产量(能力)所需要增加的最小卡车台数,或推荐所需要的最少卡车台数,其节省的设备费用是智能调度系统费用的许多倍;另一方面,为满足确定的生产能力减少所需要的车铲台数,即可以降低投资费用。其主要效益点如下:
(1)智能调度系统能有效地和最大化地减少车等铲或者铲等车现象,既能增加产量(图3)和提高车铲的有效利用率(图 4,5 和6),同时节省了车排队待装和铲等车过程中消耗的燃油;并能结合铲运设备状况自动安排车辆去加油,以减少排队等候加油的现象或等候加油的时间最短,最终实现降低单位生产成本的目的。
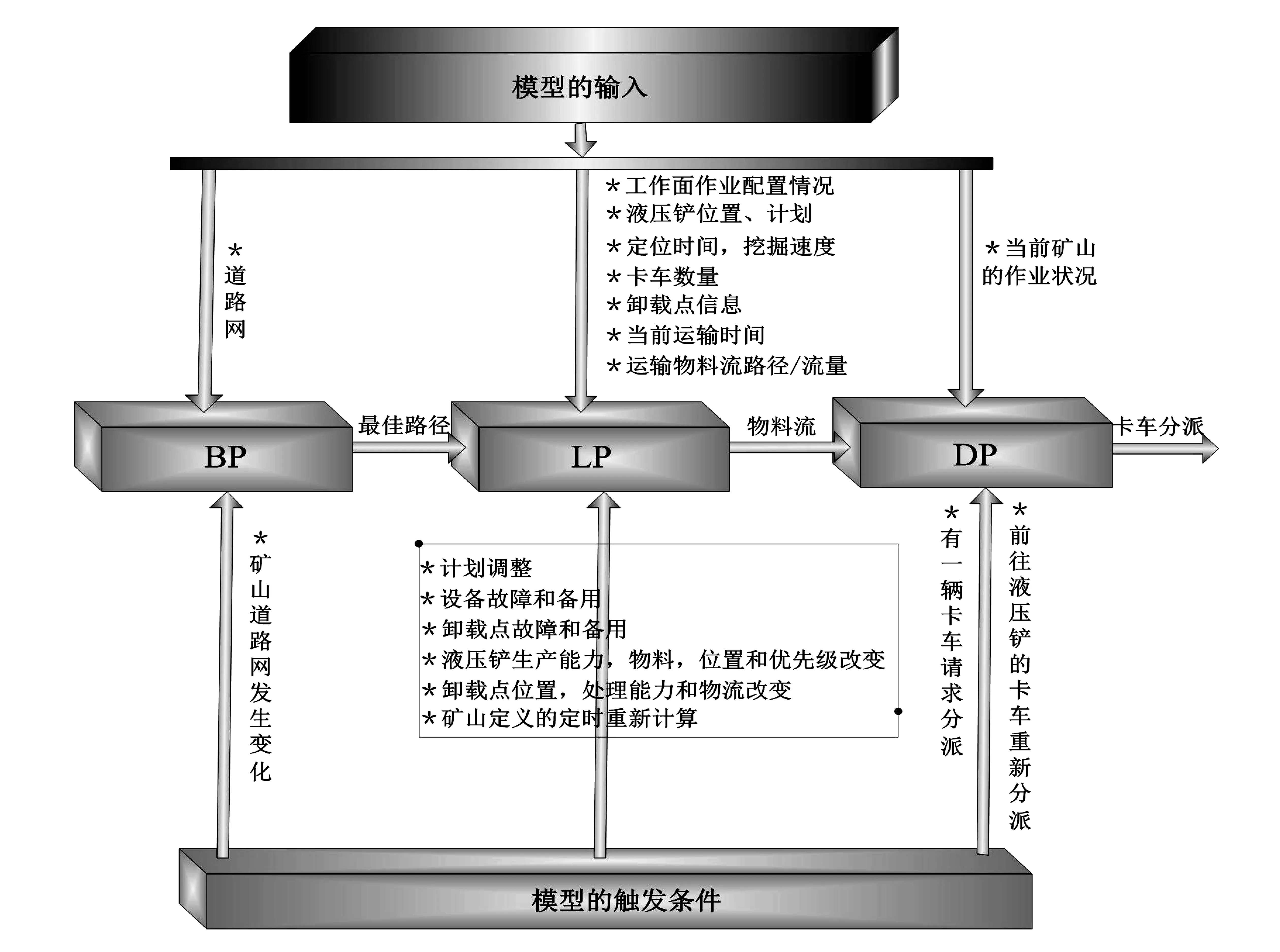
图1 派车原理图

图2 卡车智能调度系统图
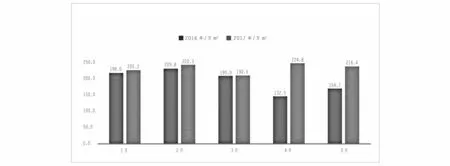
图3 同期采剥量类比柱状图
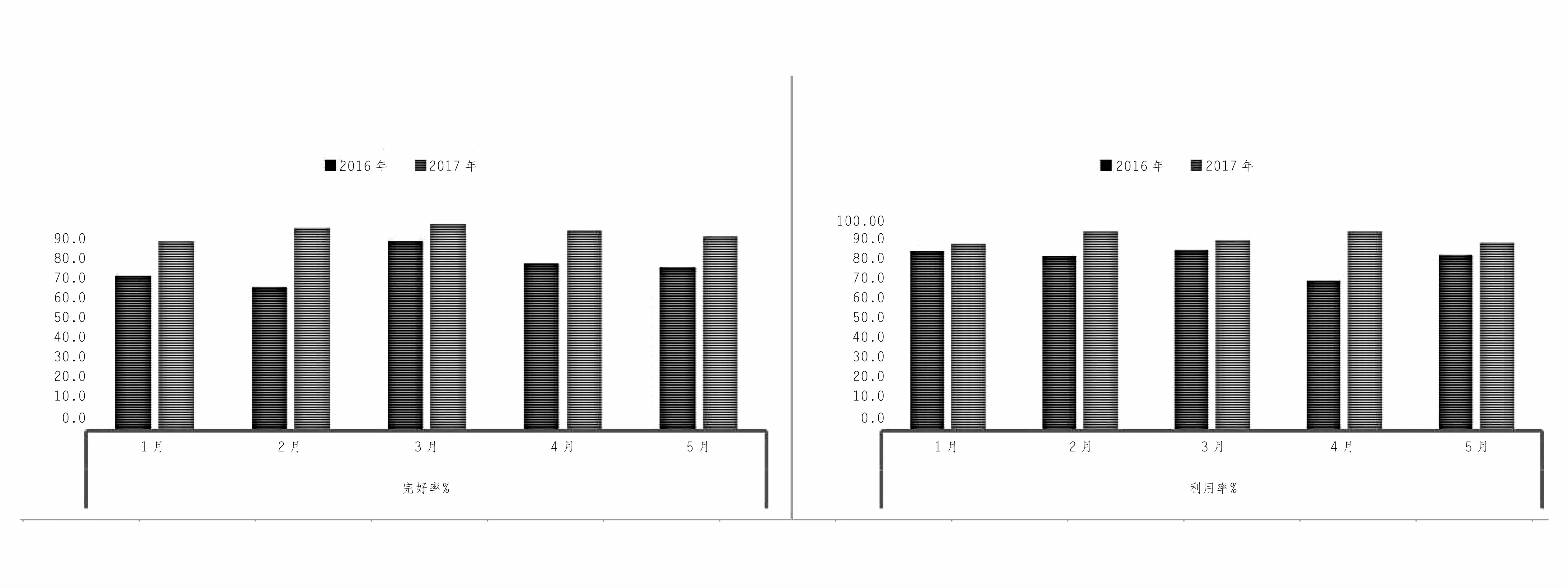
图4 挖掘机完好率、利用率柱状图

图5 TR100完好率、利用率柱状图
(2)在整个矿山作业范围内,智能调度系统可以纵观全局,可以实现实时动态监控,即每一台设备所在位置、状态、运行轨迹及速度等在卡车调度中心显示屏上都一目了然,清清楚楚。矿山主管人员和调度员紧密配合,共同工作,可以及时发现错误行为并立即纠正,避免了既成事实后造成的损失。一旦卡车运动轨迹出错或偏离路径,系统就会提示:如果物料是矿石运往了排土场或废石运往了堆浸场(半移动破碎站),系统会马上通知或在卡车终端显示屏幕上提示司机,并由卡车调度内业人员立刻告知现场(排土场或者堆浸场)管理人员及时监控或者纠正,防止卡车在错误的地点卸料,从而有效控制物料的损失或贫化。据统计,一次卸料错误造成的直接经济损失达1 000美元。

图6 NTE260完好率、利用率柱状图
(3)该系统还可以监督操作人员的活动,操作手在排土场(堆浸场)卸料后停留的时间如果超过2 min,卡车调度内业人员就会电话询问该操作手,或系统在卡车调度车载终端显示屏上发布提示或警告语言,从而有效监督操作手的操作状态。
(4)该系统会随时监控车辆的运行速度(特别是交班前30 min)。卡车调度系统未引进之前,大部分操作手为少拉一车料而在路上低速运行。安装卡车调系统后,该现象得到了很大程度地改观,若重载低于10 km/h及高于35 km/h和空载低于20 km/h及高于40 km/h,系统都会对操作手发出警告通知,并对经常性违规的操作手进行教育和再培训。此项功能为项目增加了280万t的年采剥产量,也节省了油料费用。
(5)莱比塘铜矿属于粘土矿,矿石中的粘土在堆浸场进行喷淋后易产生板结,导致浸出率降低,因此,配矿就显得非常重要。该系统既能保证矿石品位得到控制,同时使中低粘土矿也能在交叉运往破碎站进行破碎后通过皮带机、布料机运入堆浸场进行合理配比,从而有效提高了矿石的浸出率。
(6)卡车调度系统采用LTE通讯传输和存储各种信息资源,对车铲故障(机械、液压、电气等类型)进行分门别类,设备故障在卡车调度终端显示屏上的状态信息直观明了,卡车调度内业人员在第一时间将设备故障信息传达到综合修理厂以方便维修人员及时到场进行故障的排查与处理,同时也便于维修人员通过分类统计分析设备故障频率,重点监控和采取应对策略、措施和手段,有针对性地进行防范和控制,避免造成重大或灾难性损失。
(7)卡车调度系统未运行之前均采用人工方法统计数据,但因人为因素产生的失误或遗漏难以保证报表数据的准确性和可靠性,操作手运载车数记录统计的方量与现场实际测量统计的方量之间存在差别。设备停运、延误、备用等记录统计存在的偏差导致设备的完好率和利用率不准确。安装卡车调度系统后,该系统能及时、准确地生成各种数据报表,有利于管理者分析数据后采取正确的措施提高生产效率。例如,根据数据分析得知某段道路(含装、卸点)状况不好、装载面平整及爆破质量是否满足铲装要求和液压挖掘机操作技能水平等问题,现场调度和管理人员就会及时针对这些问题进行整改,以提高产量并保证矿车安全、平稳运行。
(8)卡车调度系统能在油料余量为10%~30%范围内提示操作手去加油,同时也能适时反映各种状态下的油料消耗指标,通过类比,可以对单位方量或单位距离油耗高的车辆进行分析,通过维修、改善道路、提高装载及卸料点地面的平整度等措施以达到正常或降低消耗水平,从而有效控制或降低生产成本。
(9)矿车防碰撞系统:利用GPS、GIS、短距离点对点无线通信和语音智能预警等技术,实现行车防碰撞预警功能,该功能基于提高车辆的主动安全性来实现在行车过程中给操作手提供必要的提醒技术设施,当行驶过程中遇同向或相向的车辆超过安全警戒距离时,智能终端进行报警并提交预警车辆的车号、时速及方向等相关信息,从而使操作手有时间提前采取相关措施避免事故的发生。
(10)钻机高精度的定位和智能布孔系统彻底减轻了测量人员、操作手的体力和脑力劳动强度,能够直接发送包含钻孔底部高程、钻孔范围线及初始定位坐标与孔网参数等相关信息给安装在牙轮钻机上的智能终端系统,操作手按提示操作钻机即能完成穿孔作业。该功能每年可以节省5万美元的劳动力成本。
6 该卡车调度系统的运用前景
目前国内采用的是电铲配卡车进行露天矿山开采作业,许多大型项目都安装了卡车调度系统。但缅甸由于经济不发达,虽然有很多矿产资源项目,但这些矿山开采的调度方式都比较落后,主要采用固定铲车方式,其交接班时间长,工作过程中基本上是固定车的行驶线路,不能充分发挥大型露天矿采剥设备的优势、体现最佳经济效益。通过莱比塘铜矿项目引进卡车智能调度系统及其成功的应用,给项目带来了一定的经济和社会效益,势必影响和改善缅甸矿业发展的格局,并将使卡车调度系统在缅甸及周边区域得到进一步的推广和运用。
通过实践应用得知:卡车智能调度系统可以通过行之有效的技术手段,充分提高大型露天矿山采剥设备的利用率。随着中国政府“一带一路”的发展政策和中资企业在全球布局的内生动力双重作用下,可以相信:在不久的将来,卡车智能调度系统能够在缅甸等东南亚国家的露天矿山项目中得到不断的推广应用和完善。
猜你喜欢
重型机械(2020年2期)2020-07-24
铁道通信信号(2020年10期)2020-02-07
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
汽车观察(2018年12期)2018-12-26
小学生必读(低年级版)(2018年9期)2018-12-13
石油化工建设(2018年2期)2018-07-11
产品可靠性报告(2017年6期)2017-09-05
儿童故事画报(2017年4期)2017-05-26