
基于PLC的气动搬运机械手控制系统的设计
2018-08-07 09:46张君艳
机电工程技术 2018年7期
张君艳
0 引言
机械手是在机械化、自动化生产过程中发展起来的一种新型装置,由于它可代替人在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中进行正常的工作,所以广泛应用在化工、机械制造、电子生产、冶金以及轻工业等部门[1]。在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到机械手来完成工件的取放,对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。然而搬运机械手的种类很多,按驱动方式可分为液压式、电动式、气动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。由于气动搬运机械手无环境污染,其开发和设计越来越被人们所关注,气动搬运机械手最核心的部分是执行系统和控制系统,执行机构利用电气动系统来驱动实现,控制系统通过三菱PLC编程来实现预期的作业任务,这里介绍基于三菱PLC的气动搬运机械手的控制系统设计。
1 气动搬运机械手的工作原理
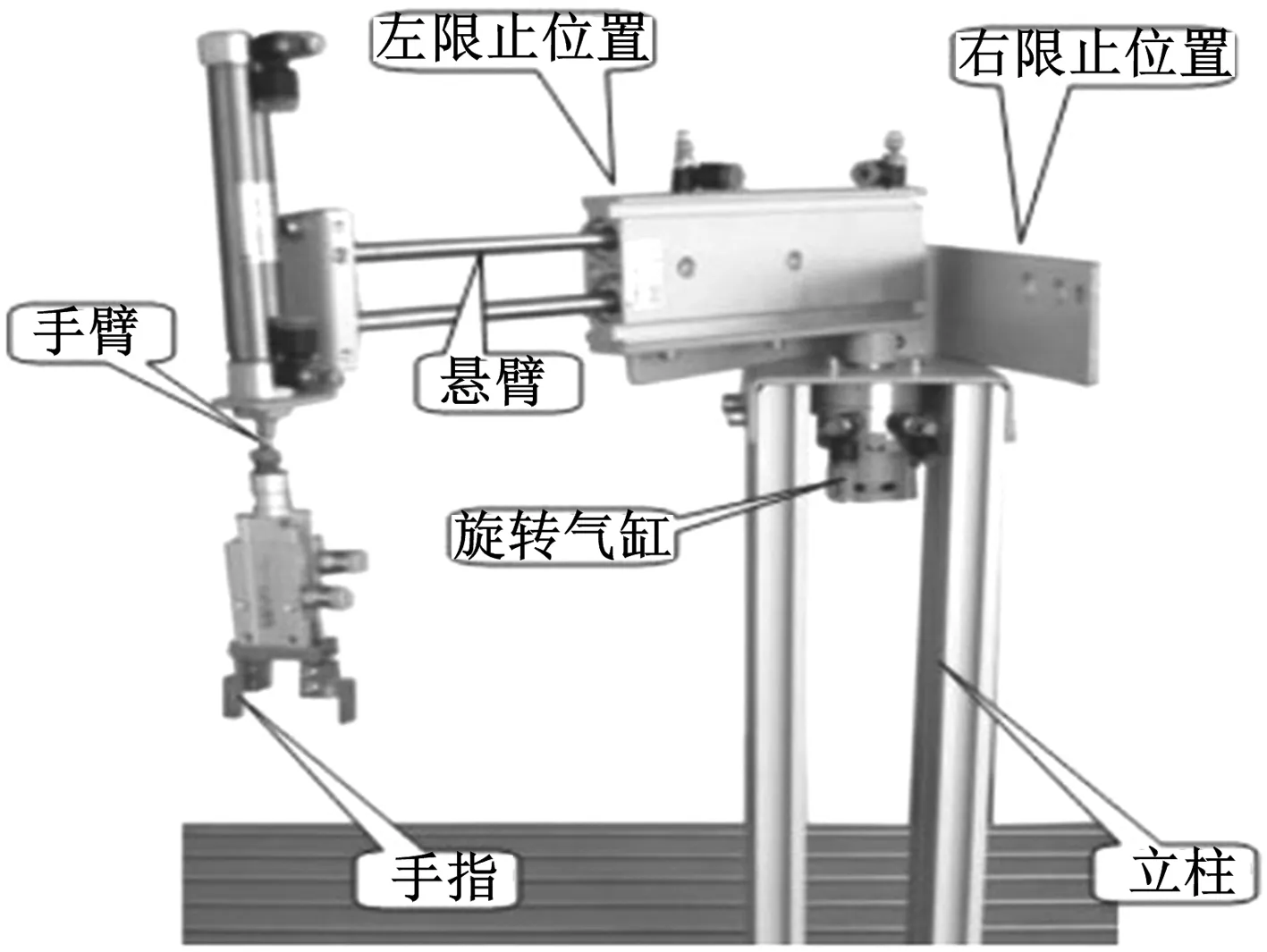
图1 搬运机械手结构图
气动搬运机械手的结构如图1所示,由机械手指、机械手臂、悬臂,旋转气缸等部分组成。机械手的终端是一个气动手指,其夹紧和放松由一个两位五通双控电磁换向阀来驱动实现,工件的夹紧与否是通过压力传感器来进行判断。气动手指安装在机械手臂上,机械手臂为单个活塞杆的双作用直线气缸来实现机械手臂的上升和下降,手臂由两位五通的双控电磁换向阀来驱动实现,上升和下降的极限位置分别由安装在气缸上的磁感应传感器来检测;机械手臂由连接件安装在机械悬臂上,悬臂是双活塞杆的双作用直线气缸,其通过两位五通的双控电磁换向阀来驱动实现,悬臂的伸出和回缩极限位分别由嵌在气缸卡槽内的磁感应传感器来检测;悬臂安装在旋转气缸的输出轴上,由旋转气缸来带动机械手的旋转,为了满足机械手可实现任一旋转工作位的停止,采用了一个三位五通的双控电磁换向阀(中位机能为0型)来驱动;从而可以控制机械手的多个旋转工作位,旋转的极限位由两个电感式传感器来判断,旋转运动由阻挡器来进行缓冲处理,防止机械臂旋转过程中产生刚性碰撞。整个气动搬运机械手通过采用压缩空气作为传动介质,可以完成机械手的旋转、机械手悬臂的伸出和回缩、机械手臂的上升和下降、机械手指的夹紧和松开等多个自由度的运动[2]。其气动回路图参见图2所示。系统所需要的工作气压靠气动三联件控制在0.6~0.8 MPa之间。
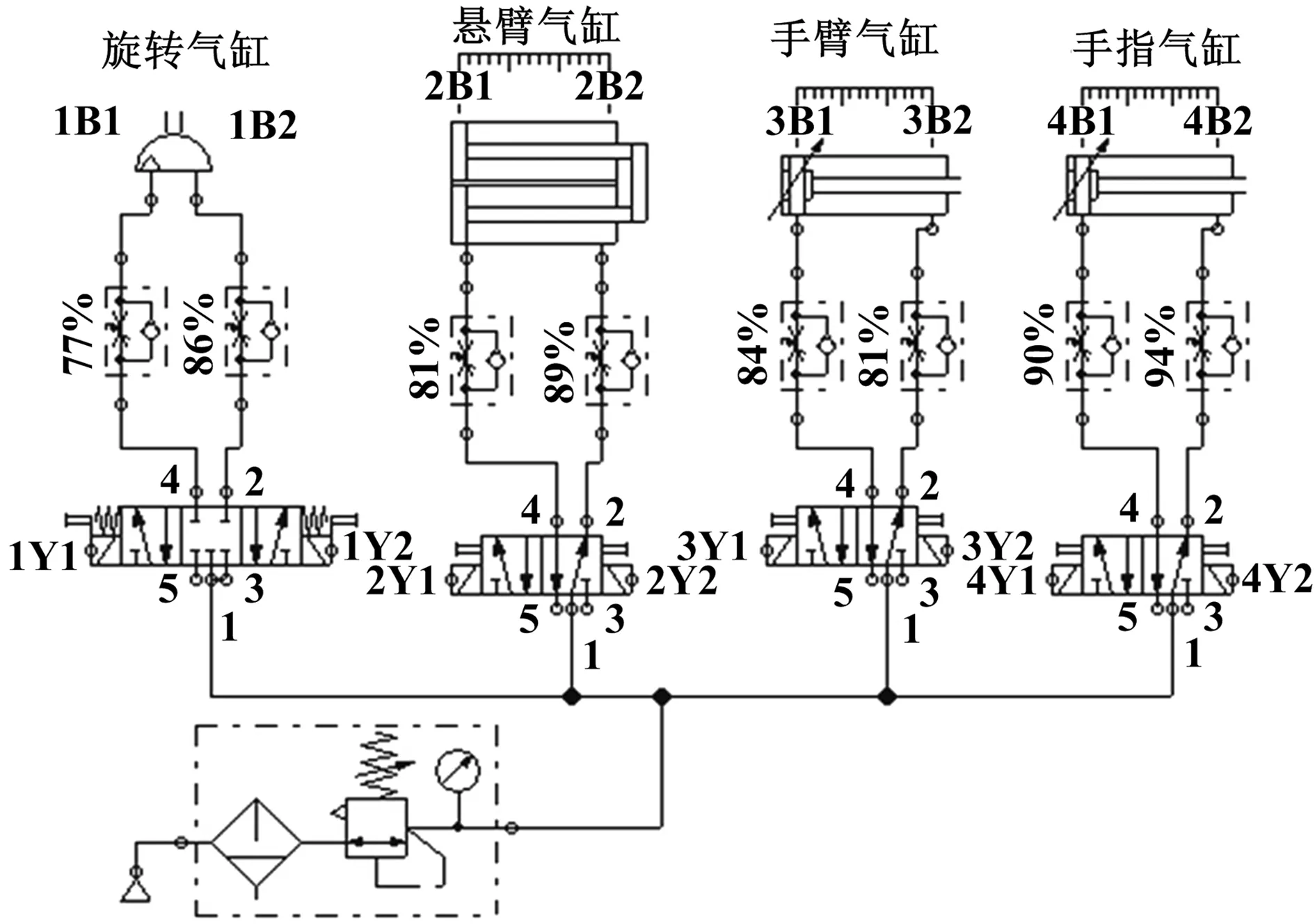
图2 机械手气动回路图
2 PLC控制系统设计
2.1 控制元件选型
根据气动搬运机械手实现功能和控制系统的要求,机械手输入采集信号为10个,再加上开关控制信号2个,共12个输入信号;线圈的驱动信号为8个,共8个输出信号,根据输入和输出信号以及考虑预留量,选用三菱FX2N-32MR的PLC,继电器输出形式。又因为气动搬运机械手控制系统要求精确定位,故采用德国FESTO公司的气缸(带有位移传感器),三位五通双控电磁阀型号为CPE10-M1BH-5/3G,两位五通双控电磁阀型号为CPE10-M1BH-5J[3]。
2.2 PLC输入输出地址表和电气原理图
气动搬运机械手的装置保护电路为起保停自锁控制电路,如果系统出现紧急故障,只要按下急停蘑菇头按钮就可以切断整个机械手的电源,此保护回路与PLC的电气原理图分开设计,这里不再详述。根据气动搬运机械手的结构和气动回路原理图中四个电磁阀和气缸的检测信号分析绘制输入输出地址表如下,参见表1。根据输入和输出地址表进行PLC电气原理图的设计,PLC电气原理图参见图3所示。

表1 搬运机械手PLC输入和输出地址表

图3 PLC电气原理图
2.3 PLC编程设计
由于PLC编程指令非常强大,功能指令很多,在编程设计时,编写程序比较容易,非常方便实现较复杂的控制系统[4];PLC的编程方法有很多种,本文采用三菱PLC的Gx软件进行程序设计。在设计程序之前要先根据气动搬运机械手的控制要求编写工艺流程图,参见图4。气动搬运机械手编程设计包含设计系统的安全保护程序,系统的初始化程序[5],系统复位程序,气动搬运机械手的模式选择程序,气动搬运机械手的控制顺序程序等部分,其中系统的初始化程序是气动搬运机械手动作之前必须满足初始化条件,即旋转气缸旋转到工件被搬运点,悬臂气缸回缩到位,手臂气缸上升到位和手指气缸放松到位;气动搬运机械手的模式选择分为点动调试控制、单周期运行模式和循环模式(含暂停和完全停止控制),气动搬运机械手的控制顺序程序为主程序,主程序是实现将工件从指定的地点搬运到需要的地点进行加工或分拣,按照工艺流程图的要求利用步进指令来编写完成[6]。

图4 气动搬运机械手工艺流程图
2.4 气动搬运机械手安装与调试验证
气动搬运机械手安装完毕以后,在进行电气控制系统调试操作前需要进行操作如下:(1)电源控制柜内的总空气开关打到ON;气动搬运机械手的急停保护按钮旋开;(2)确认空压站系统气压已达到6 MPa以上且稳定;保证系统所需要的工作气压靠气动三联件控制在0.6~0.8MPa之间,安全保护装置的紧急停止电路处于解除状态;(3)先选择点动调试,依次按下点动按钮,分别对每个气缸按照动作顺序进行单独调试;(4)点动调试结束后,进行单周期调试,无任何故障,连续顺序动作的调试无故障。如果系统中有故障现象,上电成功后先按一下“异常复位”按钮,当整体不存在异常时,设备按照工艺运行,调试完成。注意若发生任一故障,必须等故障排除之后,重新按下“复位”按钮,程序才能将故障信号解除,否则系统仍然不能启动。
3 结论
气动搬运机械手被称为“工业机械手”,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的应用[7]。基于PLC的气动搬运机械手通过安装与调试验证控制系统设计合理,方案可行,实物结构具有结构简单、运动平稳可靠、性价比高、易于控制和维护等优点,实践过程中,机械手具有可以模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作等很多优点,既减轻了工人的劳动强度,又节约了人力资源,实用性较高,用途广泛[8];将其应用在自动生产线和柔性化生产中,不仅可以提高生产的自动化水平和劳动生产率,而且可以减轻劳动强度、保证产品质量、实现安全生产等,应用前景非常大。
猜你喜欢
少先队活动(2022年9期)2022-11-23
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
中国特种设备安全(2019年3期)2019-04-22
江西建材(2018年1期)2018-04-04
摄影之友(影像视觉)(2017年11期)2017-11-27
山东工业技术(2016年15期)2016-12-01
寻根(2016年4期)2016-11-18
凿岩机械气动工具(2016年2期)2016-11-11
