动车组运行状态智能检测装备
2018-08-07 01:29刘硕研柴金川
铁路计算机应用 2018年7期
张 望,刘硕研,柴金川
(1. 中国铁建电气化局集团有限公司,北京 100041;2. 中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081;3. 中国铁道科学研究院集团有限公司 国家铁道试验中心,北京 100015)
目前,动车组检修模式大致分为库内静态检修和正线动态检修两种模式。其中,入库地沟式静态检修,可以精准定位故障位置及等级,然而却缺乏对运行列车的动态状况监控,而运行过程的潜在故障会随着列车长距离行驶,大大增加事故的发生几率。为此,人们提出了正线动态检修模式[1-3],该模式旨在关注高速行进中的动车,通过高速线阵相机采集通过观测站的列车图像,由人工监控排查运行动车的故障位置。然而人工监控效率较慢,极易引起延判、误判等情况,从而造成大量不必要的途中停车,增加了行车调度负担。鉴于此,本文提出了一套0.5级动车组智能检测装备,该装备安装在入库口,既能识别运行过程中的列车故障,也不影响行车调度,此外预判的故障也可作为入库静态监控的重点观察部件,从而提升故障识别准确率。
0.5级动车组智能检测装备是一套集车底车顶可视部位自动图像检测、受电弓工作位压力自动检测、受电弓滑板磨耗及中心偏移量自动检测等主要功能为一体的综合自动在线检测系统。该系统按布局可分为检测站、检测主机室、远程控制室3部分,检测站安装于检测线路的检测设备,包括走行部的5个检测箱体(3个沉箱,2个侧箱)、受电弓检测一体箱、压力检测设备;检测主机室位于检测线路轨边,检测站检测数据经检测主机室预处理上传至远程控制室经专家诊断,系统平台综合分析后传输至段、铁路局信息化系统。
为了使该系统更具备智能化特性,本系统针对受电弓滑板磨耗值监测和运行状态故障识别,分别提出一套智能化算法,使其能够更好地为工作人员提供便利:基于3D点云的受电弓滑板磨耗深度测量方法和基于Region with CNN(R-CNN)的列车运行故障检测算法。最后将智能识别算法的结果与人工监控模式相辅助,从而在保证故障识别率的同时,尽可能地降低人工劳动强度。
1 动车组运行状态智能检测设备
动车组智能检测装备图如图1所示。系统安装在动车入库线上,对每天入库的全编组列车运行状况进行综合检测,不需要停车、顶轮,检测车顶、车底及侧部的关键零部件缺失、变形等异常情况,能及时发现危害性缺陷,自动识别缺陷并预(报)警,综合评价并跟踪整车质量状态,更好地保证动车组运行安全,极大地提高了检修效率,节约成本。
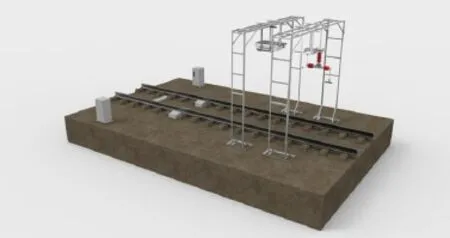
图1 动车组智能检测装备图
1.1 基于R-CNN的列车运行故障检测算法
列车走行部智能检测设备如图2所示,主要用于识别动车组车底车顶关键部件脱落、缺失等异常。该系统利用轨边安装的线阵摄像头,采集运行动车组走行部、制动配件、底架悬吊件、车体两侧裙板、转向架等部位图像,与其最近过车的历史图像进行比对,监测当前运行动车的结构件是否有变化、变化趋势以及变化类型,实现故障的实时报警。然而,由于车速、大气、光线、抖动等诸多外部因素的不同,使得不同时期采集的两幅图像之间存在亮度、分辨率、长度等差异,因此目前单纯采用图像比对方法[4]的图像故障识别算法存在大量的误报现象,故障定位不精准。

图2 列车走行部智能检测设备
基于R-CNN[5-6]的列车运行故障检测算法流程图如图3所示。基于R-CNN算法将列车车头、车厢连接处、车尾等部位进行目标定位;根据车头、车尾及车厢连接处的位置将列车图像按照车厢节数进行准确分割,从而保证识别的故障可以准确定位;定位列车车轮位置,将采集的图像分为转向架区域和非转向架区域,针对不同的图像类型,采用不同的故障识别策略,即针对转向架区域,以图像区域作为目标进行故障识别定位,根据故障分数值判定是否存在故障;针对非转向架区域,以部件为目标进行故障识别定位,同理,根据分数值判定是否存在故障。
以列车车轮为例,将各种车型在不同光照、不同车速下的车头照片作为训练样本,对以caffe框架利用ILSVRC 2012的数据集(imagenet)训练得到的网络模型进行fine-tuning 训练,使网络模型中的参数适用于车头特定领域的参数。针对测试样本图像,采用Region Proposal方法选择候选区域,即将不同宽高的滑动窗口,通过滑动获得潜在的目标图像;提取CNN特征,根据输入进行卷积/池化等操作,得到固定维度的输出;进行分类与边界回归,对上一步的输出向量进行分类(需要根据特征训练分类器);通过边界回归(bounding-box regression) 得到精确的目标区域,由于实际目标会产生多个子区域,旨在对完成分类的前景目标进行精确的定位与合并,避免多个检出,从而将列车车轮的位置准确定位,确定转向架的区域,以便采用不同的方法进行故障识别。R-CNN特征提取方法如图4所示。

图3 基于R-CNN的故障检测算法流程图
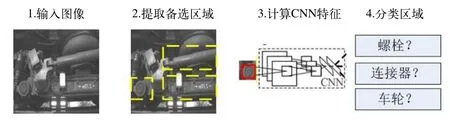
图4 R-CNN特征提取方法
1.2 基于3D点云信息的受电弓滑板磨耗深度测量值检测算法
受电弓及车顶状态动态检测系统[7-8]采用高速、高分辨率、非接触式图像分析测量技术,实现了对受电弓滑板磨耗、中心线偏移、工作压力等关键特定参数的动态自动检测和车顶异物及关键部件状态的室内可视化观测。
基于3D点云信息的受电弓滑板磨耗深度测量值检测设备如图5所示,主要包括补光灯、光电开关、3D激光传感器、高分辨率照相机等。当受电弓通过检测设备时,补光灯会根据当时的光照条件对光线进行调整和补偿,3D激光传感器将激光发射到碳滑板上,而面阵相机接收反射光线,从而构成大量的3D点云数据,以便进行滑板磨耗值测量。

图5 基于3D点云信息的受电弓滑板磨耗深度测量值检测设备
现有的受电弓测量方式大多采用双目相机,利用拍摄的受电弓图像,重构三维空间距离,计算出滑板磨耗值。为了使得测量数据更加精准、有效,提出一种基于3D点云的受电弓健康状态预警模型[9]。采用三维激光扫描技术直接得到真实物体表面的空间采样点,即点云数据,利用点云数据的局部拓扑信息,近邻位置重构三维物体表面情况,获取该受电弓的滑板磨耗值、中心线偏移量以及前后倾斜角度等测量数据,为工作人员提供受电弓的健康情况指导和数据依据。
2 动车组运行状态智能检测算法的应用情况
动车组运行状态智能检测装备采用高速、高分辨率、非接触式图像分析测量技术,实现了对列车走行部、闸瓦、受电弓滑板磨耗、中心线偏移、工作压力等关键特定参数的动态自动检测。该系统的引入可显著提高动车组工装设备检修的自动化水平,减轻工作人员的劳动强度,提高劳动效率。
该装备自动采集的图像有列车走行部图像和受电弓3D点云图像。列车走行部图像采集设备包含3套沉箱、2套侧箱和1个车顶相机,其中,3套沉箱共安置5个超高速高清晰线阵相机,用于采集动车底部的高清图像(包括制动装置、驱动装置、牵引装置、转向架、轮轴、车钩及车底部其他部位);左右侧部各安装,1套高速线阵相机,用于采集转向架和裙摆图像;车顶相机采集列车顶部的工作状态(如瓷瓶,空调,以及其他区域等)。受电弓3D点云图像主要是采集激光在滑板不同位置的反射信息构成的。如图6所示。
2.1 基于3D点云信息的受电弓滑板磨耗深度测量算法应用

图6 动车组智能检测装备采集的图像
根据激光扫描受电弓碳滑板获取的3D点云数据,采用大数据分析技术和三维重构技术,获取受电弓滑板磨耗值、中心线偏移量以及前后倾斜角度等健康数据,可以给工作人员提供该弓形的评价指标和数据,为其更换提供数据支持。
2.2 基于R-CNN的列车运行故障检测算法应用
分析基于R-CNN算法的列车车头、车厢连接处、车尾及车轮的定位准确性。非极大值抑制(NMS)计算出每一个bounding box的面积,根据score进行排序,把score最大的bounding box作为选定的框,计算其余bounding box与当前最大score的IoU,去除IoU大于设定阈值的bounding box。重复上面的过程,直至候选bounding box为空,再将score小于一定阈值的选定框删除得到一类的结果。
图7展示了车头、车轮的定位图像。
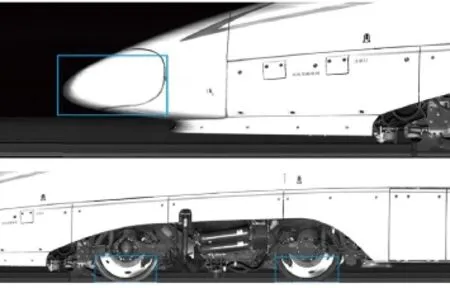
图7 基于R-CNN的车头和车轮定位图像
随后评价本算法的故障识别性能,本文使用漏报率和误报率来评价算法。漏报率是指在故障检测中存在N次故障有M次未能检测出;误报率是指在检测出的N次故障中,其中,有M次不是故障。经过算法的多次运行获得的误报率为13.5%,漏报率为26.5%。由于车速、大气、光线、抖动等因素的不同,使得不同时期采集的两幅图像之间存在亮度、分辨率、长度等差异,因此会将一些污渍、光照等情况判断为故障,造成了一定的误报率;动车组中的故障有些非常隐蔽,行车速度不均衡,将会造成漏报率。在此后的实验过程中,加大图像的预处理,从而使得拍摄的照片更大程度地表征列车故障的真实情况。
以实际车厢图像为例,与现有故障识别算法进行性能比较,如图8所示。该算法可以有效地识别故障,并确定其位置,虽然仍存在一些误报区域,但其位置邻近实际故障区域。此外,漏报率也在可控范围之内。而完全基于图像比对的故障识别算法存在大量的误报区域,并未从真正意义上减轻工作人员的劳动量。由此可见,本文算法有效地抑制了误报情况,提升了故障实时检测和自动报警的效率。

图8 算法的性能展示
3 结束语
动车组智能检测装备是一套集高速数字图像采集技术、高亮度半导体光源技术、图像分割识别技术、大容量图像数据实时处理技术和精确定位技术、自动控制技术以及故障自动识别技术于一体的智能系统。该系统采用3D激光测量技术,根据受电弓滑板上3D点云分布情况,测量滑板磨耗值和中心线偏移等关键特定参数是否达到报警程度;通过安置在轨道底部、侧部及顶部的高速高分辨率线阵相机实时拍摄的列车全方位关键部件图像,采用深度学习方法对不同区域采用不同的故障识别算法进行评判。该装备可显著提高动车组、大功率机车工装设备的检修自动化水平,减轻工作人员的劳动强度,提高劳动效率。
猜你喜欢
铁道机车车辆(2022年1期)2022-03-24
铁道学报(2020年8期)2020-09-07
哈尔滨铁道科技(2020年4期)2020-07-22
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
制造技术与机床(2019年12期)2020-01-06
故事作文·高年级(2018年12期)2018-12-17
小学生导刊(2018年4期)2018-04-18
小猕猴智力画刊(2017年3期)2017-03-24
作文与考试·小学高年级版(2016年2期)2016-09-10
中南大学学报(自然科学版)(2014年5期)2014-04-01