液压推进型水下机器人的运动控制方法研究*
2018-08-03 04:19田烈余张培豪陈宗恒
机电工程 2018年7期
田烈余,周 锋,张培豪,陈宗恒
(1.广州海洋地质调查局,广东 广州 510760;2.浙江晶盛机电股份有限公司,浙江 上虞 312300;3.浙江大学 海洋学院,浙江 舟山 316021)
0 引 言
ROV(remotely operated vehicle)作为海洋科学考察、资源开发及水下工程等领域的重要作业工具,其运动控制仍是国内外研究热点之一[1]。而液压推进型ROV由于其功率密度大和调速性能好,广泛应用于水下大功率作业。对于ROV的运动控制方法研究,目前已有许多重要成果。TEHRANI[2]使用PID控制器实现了“DENA”ROV的深度控制;HOU和CHEAH[3]采用PD控制器实现了多个水下机器人的编队控制;此外,也有学者将PID控制方法与其他控制方法结合,如TANG等[4]将PID控制算法与非线性模糊补偿结合,在ROV定深控制时成功抑制了超调;MA等[5]引入蚁群算法对PID参数进行在线优化,实现了ROV的定深、定高和定向控制。
然而大多ROV控制算法以研究电推进器为主,针对液压推进器的控制研究较少。液压推进控制系统与电机控制相比,非线性特点更为显著。比例电磁阀的磁滞现象以及液压参数波动(油温和压力等)的存在使液压推进器的开环控制性能相对较差。多个推进器的不一致容易使ROV在定向控制中产生较大控制偏差,对潜器的运动和作业能力产生较大影响。
本文将提出一种将液压推进器转速PI控制与ROV艏向PID控制相结合的控制方法。
1 水下机器人运动学建模
海马号ROV的固定坐标系和艇体坐标系(运动坐标系)如图1所示。
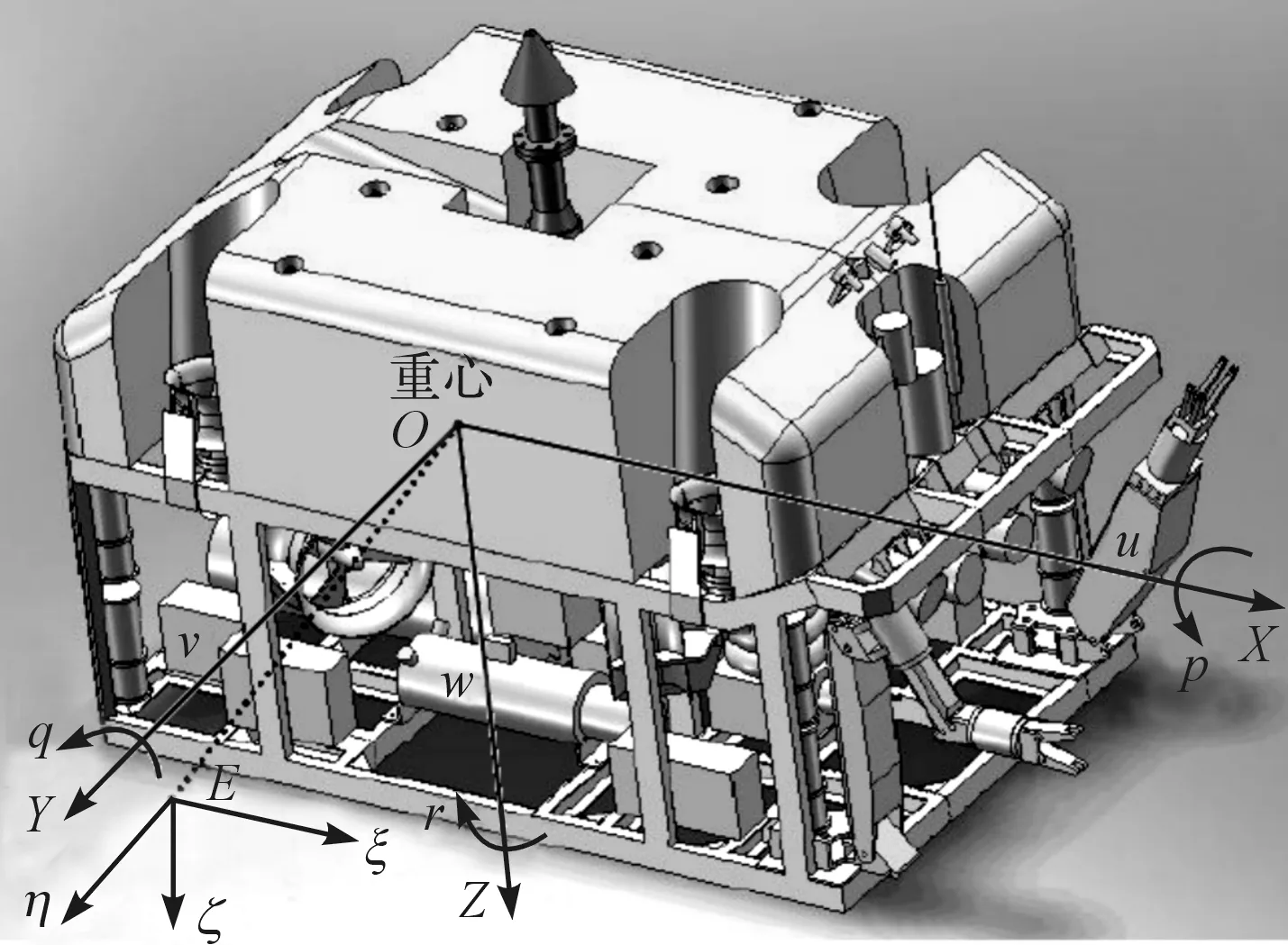
图1 海马号ROV的固定坐标系和艇体坐标系

(1)
式中:J(η)—坐标转换矩阵。
在艇体坐标系中,ROV运动的动力学方程可采用基于Fossen大纲非线性模型表示[8]:

(2)
式中:M为质量惯性矩阵;C(v)—科氏力和向心力矩阵;D(v)—水动力阻尼矩阵;g(η)—重力和浮力产生的力和力矩向量;τ—推进系统产生的控制力和力矩;Δf—未知干扰力/力矩向量。
海马号有8个液压推进器,其中4个水平推进器为矢量布置,4个垂直推进器推力方向与XY平面夹75度角,推进系统产生的推力可表示为向量u=[u1,u2,u3,u4,u5,u6,u7,u8]T。由于液压型ROV本身质量大且浮心位于重心上方,在横倾和纵倾方向有足够大的复原力矩,故ROV控制系统较多采用简化四自由度模型[9-10]。故ROV所受力和力矩向量τ(忽略横倾角和纵倾角控制)可表示为:
τ′=Bu=[B1,B2]u
(3)
其中:
τ′=[X,Y,Z,N]T
式中:α—水平推进器推力方向与X轴夹角;β—垂直推进器推力方向与XY平面的夹角;d—垂直推力与Y轴的作用距离;l—水平推力与重心间的作用距离。
2 运动控制器设计
ROV的定向控制原理如图2所示。
工程建设中,造价全过程控制与管理非常重要,有效实施此项工作,提高项目经济效益,从根本上保障项目施工的安全与经济性。未来项目建设中,要贯彻落实工程造价全过程控制与管理,渗透到项目建设的每一环节,对建筑工程实现全过程管控,对于项目质量的保障具有深远意义。
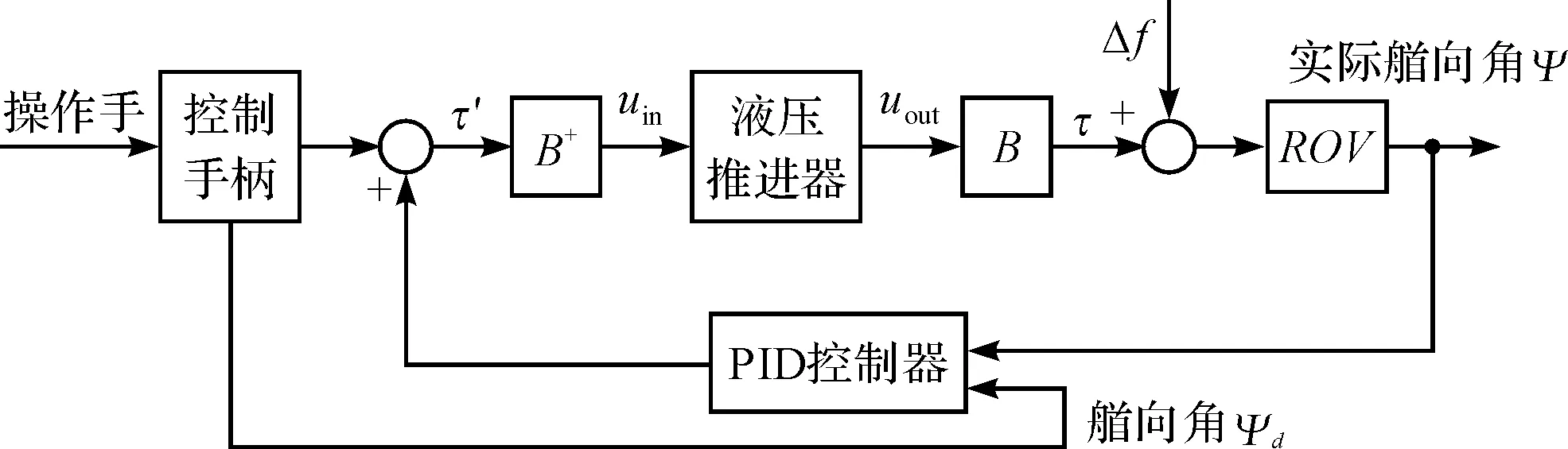
图2 ROV的定向控制原理
期望艏向角ψd由操作手给定,通过PID控制器可得到一个输出转矩τ’,再经过推力分配矩阵B+得出每个推进器的输入力大小。常规PID控制器在液压推进器上采用开环控制,并不考虑磁滞现象等的影响,因此由推进器不一致产生的控制误差不能忽视。
为解决控制输入uin与推进器推力输出uout间由电磁滞环带来的不一致问题,可将转速PI控制器应用于每个螺旋桨控制。
考虑到螺旋桨推力与转速平方成正比(推力比例系数为Cf),本研究以水平螺旋桨u1为例,设计其控制结构如图3所示。

图3 水平螺旋桨的PI控制器
3 仿真研究
本研究在Matlab/Simulink中建立ROV运动控制仿真模型,如图4所示。

图4 ROV运动控制的仿真模型
该模型主要由控制手柄输入、定向PID控制器、推力分配及合成矩阵、螺旋桨和ROV六自由度模型组成。其中,控制手柄为四自由度模型,ROV定向PID控制器为单输入单输出控制器。
为减小电磁滞环等干扰的影响,本研究在ROV推进器模型中增加了图2所示的PI控制器以精确控制转速及推力。为增加仿真对比,常规PID控制的推进器模型采用推进器开环比例控制,同时在阀控螺旋桨模型中增加了随机的20 kgf幅值的推力干扰。
仿真主要参数如表1所示。
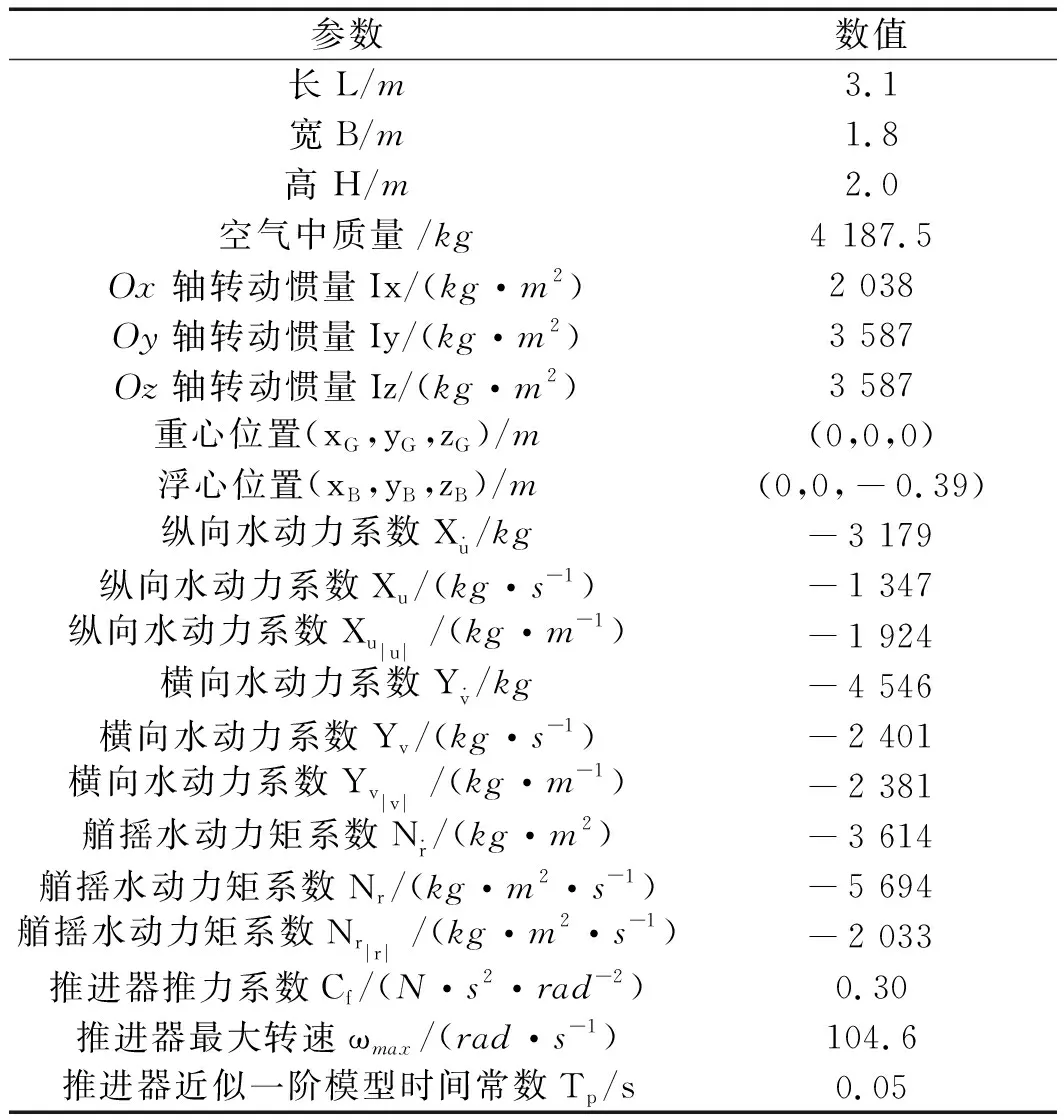
表1 ROV控制仿真参数
ROV的控制手柄输入在仿真过程中仍保持τ′=[4 000,0,0,0]T,艏向PID控制器设定值为0(控制器参数Kp=6 000,Ki=0,KD=2 500)。同时增加了干扰向量Δf=[0,0,0,0,0,1 000]T,作用时间在10 s~12 s内,一阶滤波常数为1 s。
艏摇干扰力矩如图5所示(干扰向量作用时间较短,一阶滤波后峰值约860 Nm)。

图5 ROV定向控制的艏摇干扰力矩
ROV水面定向运动时的偏航角仿真结果对比(普通PID和复合PID控制器)如图6所示。
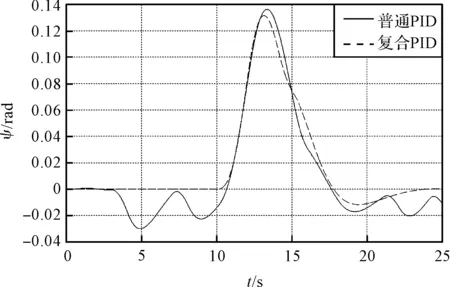
图6 ROV定向控制的偏航角仿真结果
艏左水平推进器转速仿真结果对比如图7所示。

图7 ROV定向控制的艏左水平推进器仿真结果
由仿真曲线可知:复合PID控制器在干扰扭转作用时偏航角变化波动更小,并且在干扰消失后能快速恢复至设定值。这主要是由于转速控制闭环使螺旋桨转速有更好的稳态精度及更快的响应时间。
ROV原地转艏90°和180°的阶跃响应仿真结果分别如图(8,9)所示。

图8 ROV转艏90度阶跃仿真结果
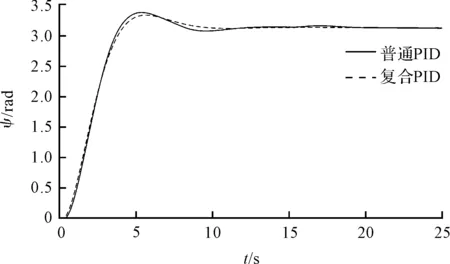
图9 ROV转艏180度阶跃仿真结果
由图可知:两种控制器稳态精度和响应速度相差不大,但复合PID控制器有更小的超调量。
4 结束语
ROV液压推进器比例滞环和转速控制精度误差会引起定向控制产生较大的角度偏差,改善推进器本身的控制特性是解决该问题的方法之一。因此本文在Matlab/Simulink中建立了海马号水下机器人的六自由度动力学模型,并设计了带螺旋桨转速PI闭环的复合PID定向控制器以改善推进器固有特性。
仿真结果表明:与常规PID控制器相比,本文所提出的复合PID控制器有更好的控制性能,可显著减小由液压推进器推力不一致以及外界干扰引起的偏航角波动,提高定向控制精度,在ROV转艏控制时偏航角具有更小的超调量。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
幼儿教育·教育教学版(2020年8期)2020-12-23
幼儿教育·教育教学版(2020年8期)2020-12-23
航空发动机(2020年3期)2020-07-24
当代陕西(2018年12期)2018-08-04
中学科技(2017年10期)2017-11-04
制造技术与机床(2017年3期)2017-06-23
中国舰船研究(2014年1期)2014-05-14
中国船检(2013年10期)2013-08-15