双馈风机虚拟惯量控制对电力系统暂态稳定的影响
2018-08-02 01:12:18陈汉杰韩华玲
现代电力 2018年4期
陈汉杰,罗 毅,张 磊,韩华玲
(1.华中科技大学电气与电子工程学院,湖北武汉 430074;2.华中科技大学中欧清洁与可再生能源学院,湖北武汉 430074;3.中国电力科学研究院,江苏南京 210003)
0 引 言
随着风电占电力系统比例的不断提高,风电接入对电力系统安全稳定的影响受到了广泛关注。为保证高比例DFIG并网后电力系统的安全稳定运行,世界上已有多个国家制定了相关风电并网导则,对DFIG参与系统调频提出了明确要求。其中,DFIG虚拟惯量控制因其快速灵活的调节特性,能够有效改善系统频率稳定性[1]。然而,电力系统暂态过程往往也伴随着频率的变化,由于DFIG变流器的快速响应特性,使得带有虚拟惯量控制的DFIG也能够参与电力系统的暂态变化过程,并改变DFIG暂态输出特性,这种新的特性对电力系统暂态稳定的影响值得研究。
系统发生大扰动后,根据文献[2-7]可将系统的功角摇摆过程分为3个阶段,第一阶段为故障发生时刻到故障清除时刻,这个阶段主要关注系统功角第一摆稳定性。如文献[3]分析了该阶段DFIG的等效电路,从影响同步电机电磁功率角度研究了DFIG对系统暂态功角第一摆的作用机理,文献[4]以撬棒投切型低电压穿越措施为对象,从系统加速能量角度分析了该阶段DFIG暂态有功出力对系统暂态功角第一摆稳定的影响;第二阶段为故障清除后DFIG有功恢复时期,该阶段主要关注功角第二摆失稳问题[5];第三阶段为DFIG有功恢复后系统功角依旧振荡时的大扰动动态稳定阶段,文献[6]通过对一种改进DFIG虚拟惯量控制的研究,发现DFIG虚拟惯量控制对该阶段产生的正阻尼效果,文献[7]进一步分析了DFIG虚拟惯量控制对系统阻尼的影响机理。从目前研究成果来看,对于DFIG虚拟惯量控制影响系统大扰动功角稳定的研究主要关注动态稳定阶段[6-7],而较少关注前两个阶段,原因可能是在研究中通常假定故障点距离DFIG较近,故障时DFIG机端母线电压跌落较深,因此只从低电压穿越策略和故障后有功恢复等角度讨论DFIG对系统暂态稳定的影响。事实上,系统发生短路故障时,DFIG母线电压并不总是跌落较深[8],这与故障类型和故障位置有关。当系统发生故障而DFIG母线电压跌落较浅时,根据DFIG控制逻辑,此时DFIG低电压穿越等模块并未动作,DFIG的出力特性将由虚拟惯量控制来影响,从而使得DFIG具有不同于电压深度跌落条件下的响应特性,这种响应特性对系统暂态稳定的影响少有报道。
本文首先分析了DFIG在系统发生短路故障后的行为,总结了不同电压跌落深度条件下DFIG的暂态有功特性,并重点关注电压跌落较浅时虚拟惯量控制带来的影响。基于此,结合拓展等面积定则[9]分析了带有虚拟惯量控制的DFIG对电力系统暂态功角稳定的影响机理,最后通过时域仿真验证了理论分析的正确性,为DFIG虚拟惯量技术的应用和优化提供参考。
1 DFIG暂态有功响应特性
1.1 DFIG有功功率控制逻辑
本节重点关注不同电压跌落深度条件下DFIG的暂态有功响应特性。为简化分析,假设所研究的DFIG机侧与网侧变流器均采用定子电压定向矢量控制策略,则DFIG有功出力由转子d轴分量ird控制,控制框图如图1所示。DFIG稳态运行时,其有功功率Pw可由式(1)表示:
(1)
式中:Lm、Ls为异步电机互感和定子侧自感;Us为机端电压。稳态时有Pref=PMPPT,即DFIG运行在最大功率跟踪模式。当系统频率发生偏移且低电压穿越模块未动作时,虚拟惯量控制模块将改变有功参考Pref,此时DFIG输出功率可表达为
(2)
式中:Us为机端(定子侧)电压;φs为定子磁链,通过磁链观测器获得;TeMPPT为有功信号PMPPT所对应的电磁转矩参考值;Kd为微分系数;Kp为比例系数;Δf为测量频率偏差,其值等于DFIG锁相环测量机端母线频率与系统工频之差(本文所提DFIG虚拟惯量控制均采用该种测量方案)。可以看出,当DFIG机端母线频率上升时,DFIG有功出力将减小。

图1 DFIG有功控制示意图Fig.1 Diagram of DFIG active power control
当DFIG机端母线电压跌落较深,或转子转速、电流越限时,DFIG低电压穿越模块将动作,此时选择器不再接受有功参考Pref,DFIG有功出力由低电压穿越策略决定。
1.2 不同电压跌落深度条件下DFIG有功响应特性
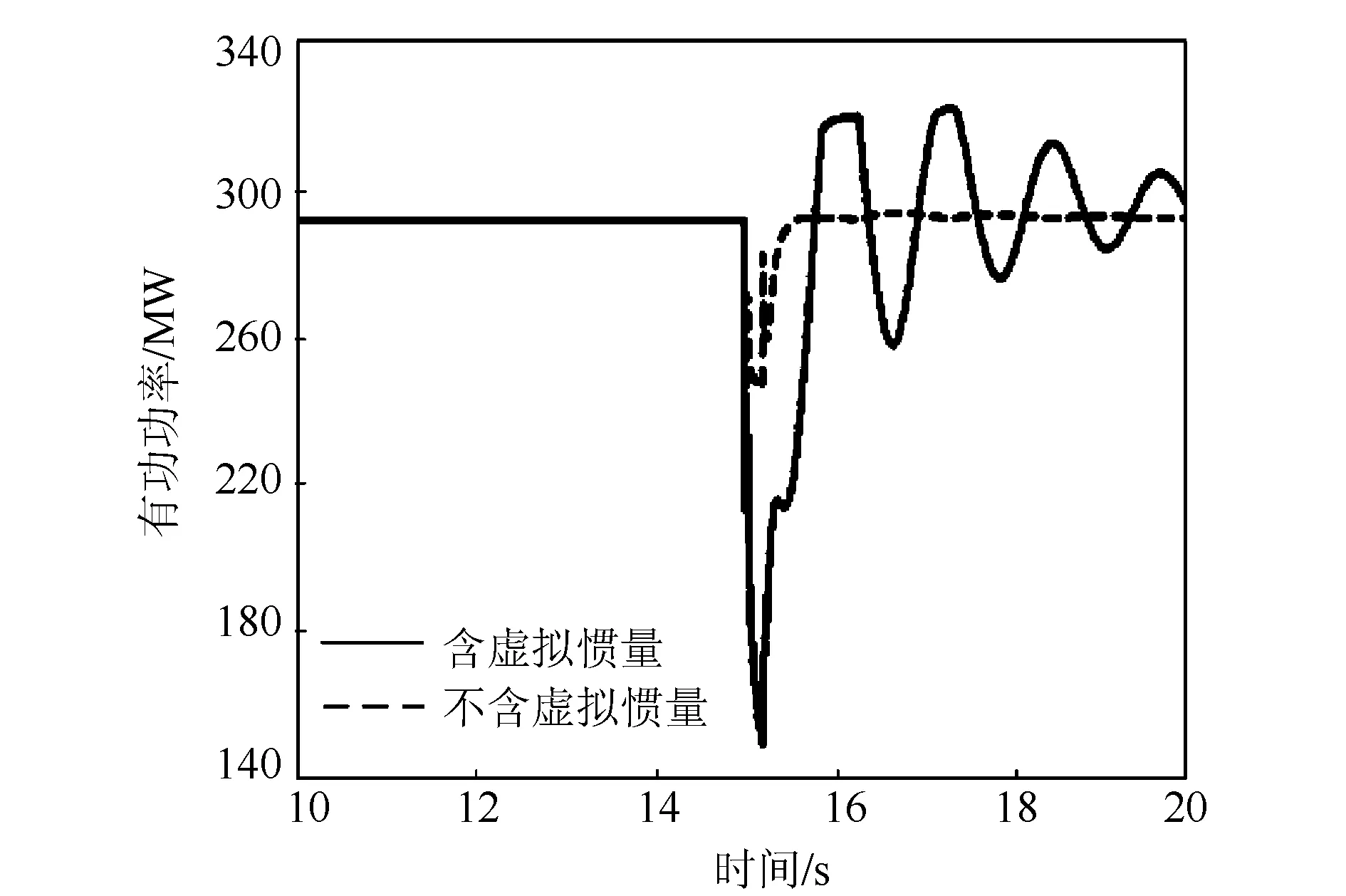
图2 电压跌落较浅时DFIG有功曲线Fig.2 DFIG active power curves(slight voltage dip)
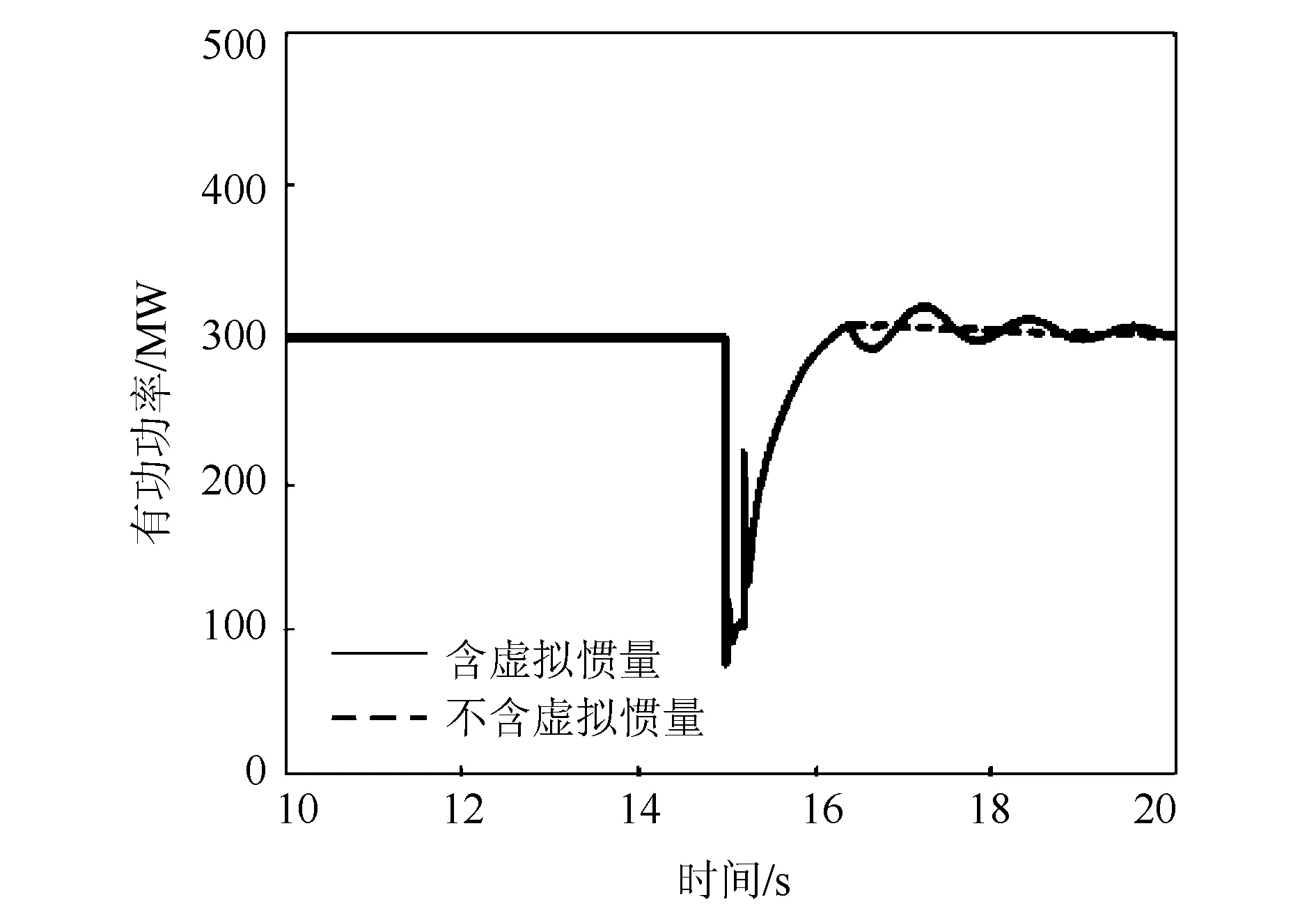
图3 电压跌落较深时DFIG有功曲线Fig.3 DFIG active power curves(severe voltage dip)
图2~图3给出了故障后不同电压跌落深度条件下DFIG的暂态有功出力曲线,可以看出,当DFIG机端母线电压跌落较浅时,DFIG将在虚拟惯量控制的作用下瞬时减少有功出力,这与虚拟惯量控制中包含的微分环节的超前调节作用有关,而当DFIG机端母线电压跌落较深时,DFIG切换到低电压穿越模式,其有功特性由低电压穿越策略决定,此时虚拟惯量控制并不起作用。对比图2和图3可知,在DFIG有功跌落时间段内,当电压跌落较浅时,包含虚拟惯量控制的DFIG比无虚拟惯量控制的DFIG减少更多有功出力, 而电压跌落较深时,二者有功出力基本一致。电力系统暂态稳定的时间尺度通常为秒级,当DFIG机端母线电压跌落较浅时,其改变有功出力的时间尺度与研究系统暂态稳定的时间尺度重叠,进而可能影响系统暂态稳定,下文将进行定性分析。此外,从图2~图3中可以看到,当DFIG有功恢复后,系统仍处于振荡状态时,DFIG虚拟惯量控制也会动作,并引起DFIG功率波动,由文献[7]可知,该过程主要影响系统的动态稳定。为区分研究,本文假设DFIG并网后系统仍然满足dTi/dωi>0,其中Ti与ωi为系统第i台同步电机的阻尼力矩与转子角速度,即本文不考虑DFIG并网后系统阻尼力矩系数变为临界值或为负的场景,主要关注系统发生大扰动后的暂态稳定过程。
2 含虚拟惯量控制DFIG影响系统暂态稳定机理分析
故障后多机系统通常呈现两群功角摇摆模式,其稳定性可以由分群后的等效双机系统进行研究,其中分群方法包括已成熟应用的同调机群识别法等,等效方法包括动态等值以及网络参数化简[10]。对于某呈现两群功角摇摆的多机系统,可设其等效双机系统前向机群S等值惯量与功角分别为MS和δS,后向机群R等值惯量与功角分别为MR和δR,基于此,系统暂态稳定性可用两群功角差δSR来衡量。δSR具体计算方法如式(3)~(7)所示:
(3)
(4)
(5)
(BilsinδSR+GilcosδSR)
(6)
(GjlcosδSR-BjlsinδSR)
(7)
式中:Pm.SR和Pe.SR分别表示系统等值机械功率与等值电磁功率;E为发电机内电势;G与B为网络电导和电纳;下标i、k与j、l为网络中节点编号。
A∠(α+δw-δR)
(8)

(9)

(10)
同理,当DFIG在S群并网后,将引起S群电磁功率减少量为
(11)

图4以流程图的形式表示了含虚拟惯量的DFIG对系统暂态稳定影响的过程。由图可知,当系统发生短路故障引起系统频率短时升高时,若此时DFIG虚拟惯量控制启动,则减少DFIG有功出力,当DFIG在R群并网时,这种特性会使δSR增大,即恶化系统暂态稳定性,当DFIG在S群并网时,这种特性会改善系统暂态稳定性。
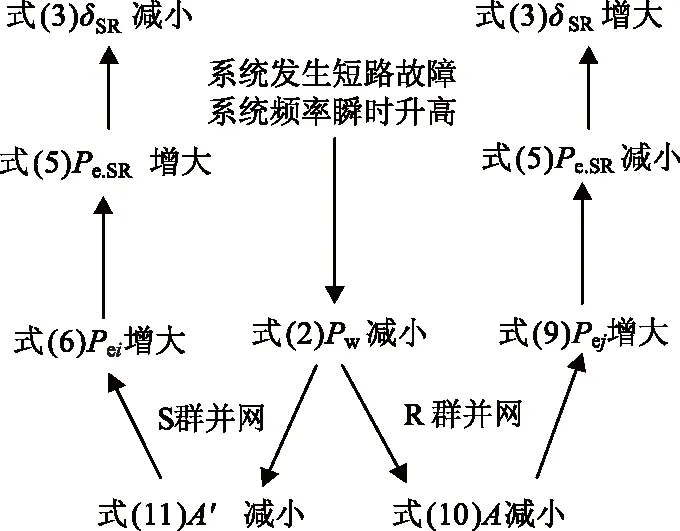
图4 含虚拟惯量DFIG对系统暂态稳定影响流程Fig.4 Influence process of DFIG virtual inertia control on power system transient stability
3 仿真验证
在DIgSILENT上搭建如图5所示的含风电场改进两区域系统模型,风电场由单台DFIG等值表示,参数与DIgSILENT自带2.5MW DFIG模型一致,改进虚拟惯量控制模块参数见文献[11],同步电机与网络参数见文献[12]。

图5 改进两区域系统示意图Fig.5 Diagram of improved two areas system
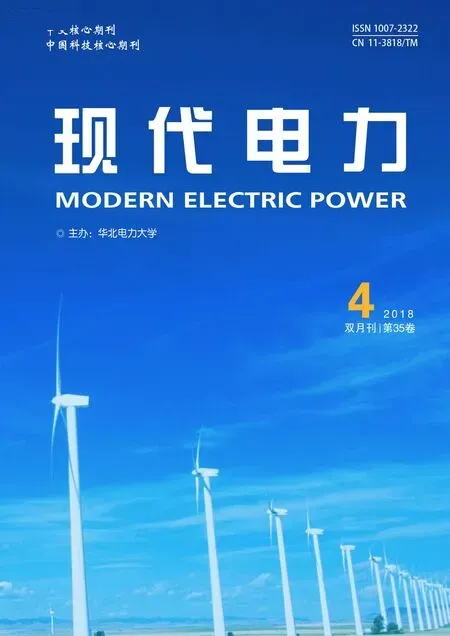
首先对DFIG处于S机群场景进行仿真,如图5,此时风电场从节点5接入系统,其有功出力为300MW,同步电机G1出力300MW,G3出力约167MW,联络线传输功率约300MW,故障点设置在节点10与11之间50%处,为模拟DFIG机端母线电压轻度跌落场景,短路类型为三相接地短路,接地电阻10Ω,持续时间0.2s,仿真结果如图6至图7所示,图中可以看出,在功角首摆期间,S机群含虚拟惯量DFIG减少更多有功出力,使δSR减少,改善了系统暂态功角稳定性,对比不含虚拟惯量的场景,最大功角减少了约3.3°。

图6 DFIG处于送端S机群(轻度电压跌落)Fig.6 DFIG located in S cluster(slight voltage dip)

图7 DFIG处于送端S机群有功曲线(轻度电压跌落)Fig.7 Active power curves of DFIG connected to S cluster (slight voltage dip)
当DFIG处于R机群时,风电场从节点11接入系统,其有功出力为300MW,同步电机G1出力500MW,G3出力约273MW,联络线传输功率约192MW,故障点设置在节点6与7之间50%处,短路类型为三相接地短路,接地电阻10Ω,持续时间0.2s,仿真结果如图8所示,图中可以看出,R机群含虚拟惯量DFIG恶化了系统暂态功角稳定,对比于不含虚拟惯量的场景,最大功角增大了约7.9°。此时DFIG有功出力如1.2节图2所示,与DFIG处于S机群场景类似,结合图4可知,含虚拟惯量DFIG在功角首摆期间减少更多有功出力,提高了R群同步电机的电磁功率,最终使δSR增大。

图8 DFIG处于受端R机群(轻度电压跌落)Fig.8 DFIG located in R cluster (slight voltage dip)
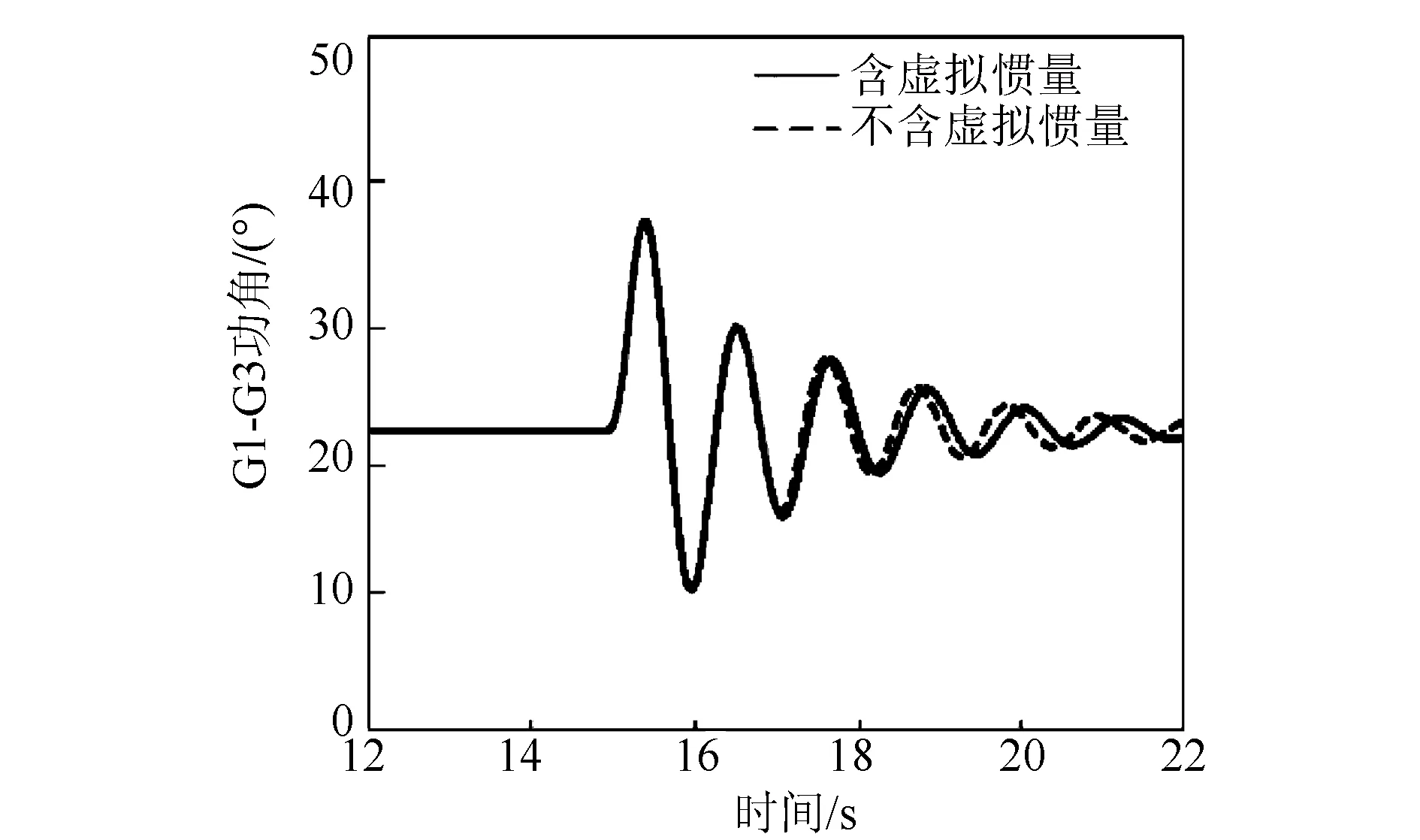
图9 DFIG处于受端R机群(严重电压跌落)Fig.9 DFIG located in R cluster (severe voltage dip)
在其他条件相同的情况下,设置母线10与11间50%处发生三相金属性接地短路,仿真结果如图9所示,此时包含与不含虚拟惯量控制两种场景下最大功角无差异,因为此时DFIG机端母线电压跌落较深,DFIG暂态有功特性由低电压穿越策略决定,其虚拟惯量控制并不起作用,DFIG有功出力如1.2节图3所示,在功角首摆期间其有功出力基本一致,故对δSR无影响。综上,仿真结果验证了理论分析的正确性。
进一步,在图8场景下,设置故障持续时间为0.7s,得到结果如图10所示,此时,含有虚拟惯量控制DFIG并网后系统失稳,而不含虚拟惯量控制DFIG并网后系统保持稳定。随着“三北”地区风电建设的逐渐饱和[13],我国风电建设有向中南部发展的趋势。随着中南部受端电网风电比例的提高,在应用DFIG虚拟惯量控制参与系统调频时,应考虑是否满足系统暂态稳定要求。

图10 系统失稳场景(轻度电压跌落)Fig.10 Scenario of unstable power system (slight voltage dip)
4 结 论
本文针对不同电压跌落深度条件下含虚拟惯量DFIG的暂态有功出力特性进行分析,并结合拓展等面积定则推导了含虚拟惯量DFIG对系统暂态稳定的影响,得出如下结论:
① DFIG暂态有功出力特性与DFIG机端母线电压跌落深度有关,当电压跌落较深时,DFIG有功出力由低电压穿越策略决定,当电压跌落较浅时,DFIG有功出力受虚拟惯量控制影响。
② 虚拟惯量控制包含的微分环节使其具有超前调节特性,在系统频率改变时能够迅速改变DFIG有功出力,其时间尺度与系统暂态稳定时间尺度重叠,进而通过影响同步电机电磁功率来改变系统暂态稳定性。
③ 当系统满足dTi/dωi>0,短路期间DFIG机端母线电压跌落较浅时,含虚拟惯量控制的DFIG处于S机群时能够改善系统暂态稳定性,处于R机群时则使系统暂态稳定性恶化,电压跌落较深时,DFIG低电压穿越控制动作,DFIG虚拟惯量控制对系统暂态稳定基本无影响。
此外,当含虚拟惯量DFIG并网后,系统不再满足dTi/dωi>0时,对系统的大扰动功角稳定的研究需要同时考虑暂态与动态两个稳定过程,其影响机理可进行更为深入的研究。
猜你喜欢
电力自动化设备(2022年8期)2022-08-09 07:31:46
水电与抽水蓄能(2022年1期)2022-03-13 09:42:36
通信电源技术(2022年23期)2022-02-20 09:06:54
能源工程(2019年6期)2019-12-02 01:58:20
智富时代(2018年7期)2018-09-03 03:47:26
电子测试(2017年12期)2017-12-18 06:35:33
科技资讯(2017年18期)2017-07-19 09:58:51
现代计算机(2016年11期)2016-02-28 18:35:14
电源技术(2015年7期)2015-08-22 08:48:34
机电信息(2015年6期)2015-02-27 15:55:06