基于非线性自适应脉冲噪声处理技术的甚低频通信大气噪声抑制算法及仿真实现∗
2018-08-01 12:36:46刘翠海
舰船电子工程 2018年7期
陈 巍 刘翠海
(1.海军潜艇学院研究生队 青岛 266199)(2.海军潜艇学院航海观通系 青岛 266199)
1 引言
甚低频大气噪声是一种低振幅的高斯型背景噪声下的突发性脉冲噪声,主要是由雷电瞬时放电所引起的[1~2]。发生闪电时,会产生闪电电磁脉冲,从而会使接收机性能恶化[3]。这种脉冲噪声会比周围的噪声要高90dB甚至会更高[4],它是影响甚低频通信的最主要因素。通常,接收机接收到的是叠加了噪声干扰的MSK信号,将MSK信号从噪声中提取出来的主要方法是采用恰当的信号处理器来抑制噪声。目前,应用比较广泛的脉冲噪声抑制方法有:削波器、限幅器、熄灭器以及采用带通滤波、扩时技术等处理方法[5]。文献[6~7]提出利用小波降噪和中值滤波组合滤波设计对数据进行预处理,提高了抑制噪声的效果。本文采用了一种基于变步长LMS算法的非线性自适应信号处理技术对大气噪声进行抑制处理。
2 非线性自适应噪声处理器设计
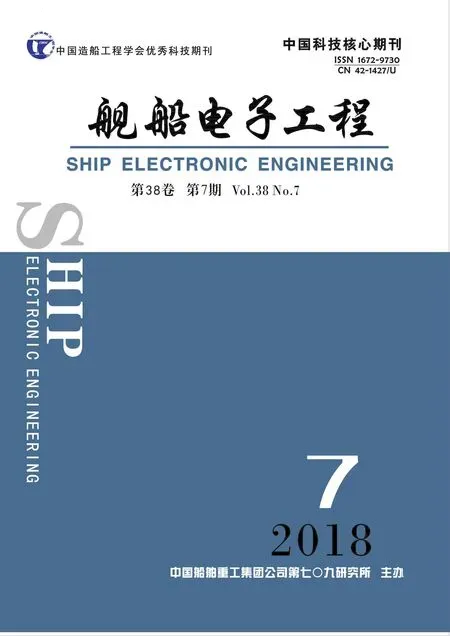
非线性自适应处理器的核心部分是自适应波形预测器。它能够通过某种自适应算法,自动地调整权向量的值,使输出信号能够预测出输入MSK信号的波形。本文采用的自适应算法是:基于双曲正切函数的变步长LMS算法。该算法具有能够在获得较快收敛速度和跟踪速度的情况下保证有较小的稳态误差的优点,比单纯采用LMS算法能够保证较快的收敛速度和稳态误差[8~10]。
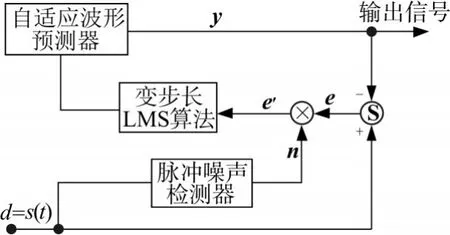
图1 非线性自适应噪声处理器的结构
2.1 自适应波形预测器模型
自适应波形预测器采用两组单频正弦信号作为线性组合器的输入信号,其频率分别为载波的中心频率,两组正弦信号的相位相差π/2。在每一个采样时刻,其输出信号都是它们的线性组合。通过不断地调整权向量和的值,使输出信号逼近MSK信号。图2为自适应波形预测器结构图。
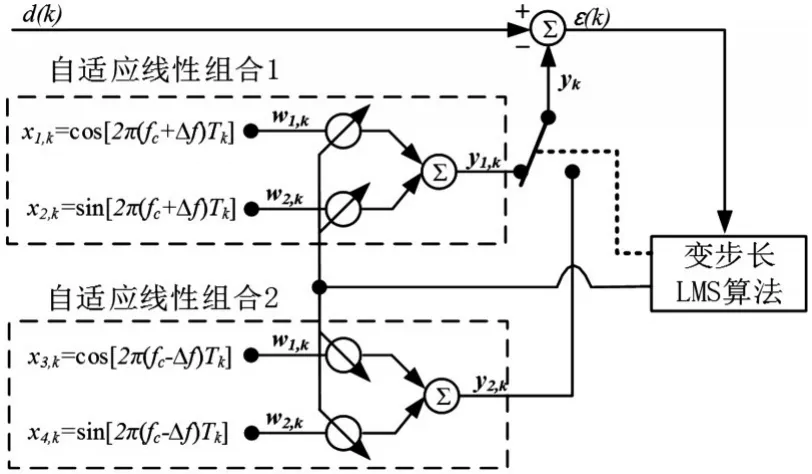
图2 自适应波形预测器结构
这种自适应波形预测器通常是用于单频干扰下使用自适应噪声消除技术[11],需要不断地调整加权向量来跟踪波形的变化。由于MSK信号具有相位连续的特点,所以,一旦波形预测器跟踪上MSK信号,那么权向量W的值就不需要做大的变化。
2.2 自适应非线性组合器
自适应非线性组合器是自适应波形预测器的核心部件,可以将多路输入映射为若干个输出。本文采用的是4路信号输入映射为2路输出的结构,具体结构如图3所示。
图中输入端为一组由元素 x1,x2,x3,x4组成的输入信号,与之对应的一组可调权向量 w1,w2,w3,w4,yk为求和单元的输出信号。
在第k个采样时刻,即t=tk时,
图3 自适应非线性组合器一般结构

线性组合器的输出信号为

由LMS算法的递推公式:

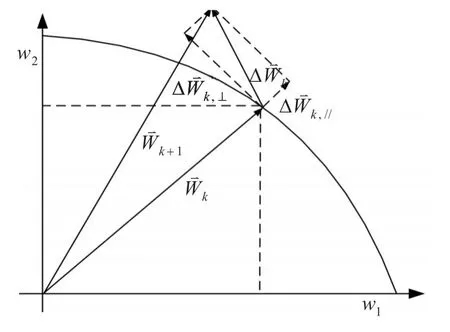
图4 加权调节向量的分解
以加权矢量W1为横坐标,W2为纵坐标,画出如图所示的权向量变化图形。加权调节向量被分解成水平部分和垂直部分,其中,表示调节波形的振幅调整,表示调节波形的相位调整。


2.3 脉冲噪声检测器
假设在第k个采样时刻,接收信号中出现了尖峰脉冲噪声即:

此时的误差信号:


脉冲噪声检测器实际上是对混有脉冲噪声的接收信号按照某种阈值来进行限幅或者置零处理,能够删除包含绝大部分噪声能量的脉冲成分,对于整个信号的处理起到非常关键的作用。
3 系统仿真及结果分析
仿真模拟在大气噪声干扰条件下,采用非线性自适应噪声处理技术的甚低频通信系统在不同信噪比条件下的系统性能对比。系统结构框图如图5所示。
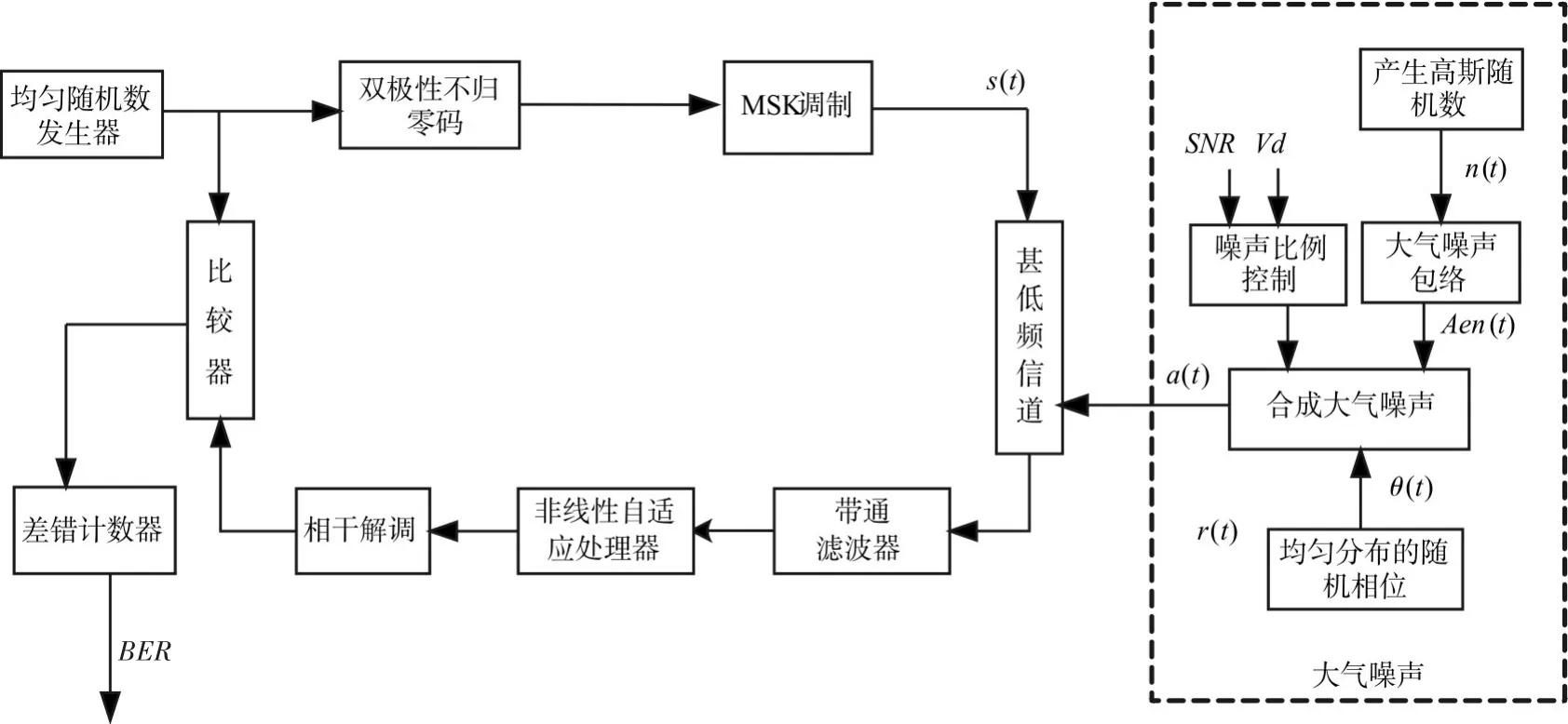
图5 甚低频通信系统仿真流程图
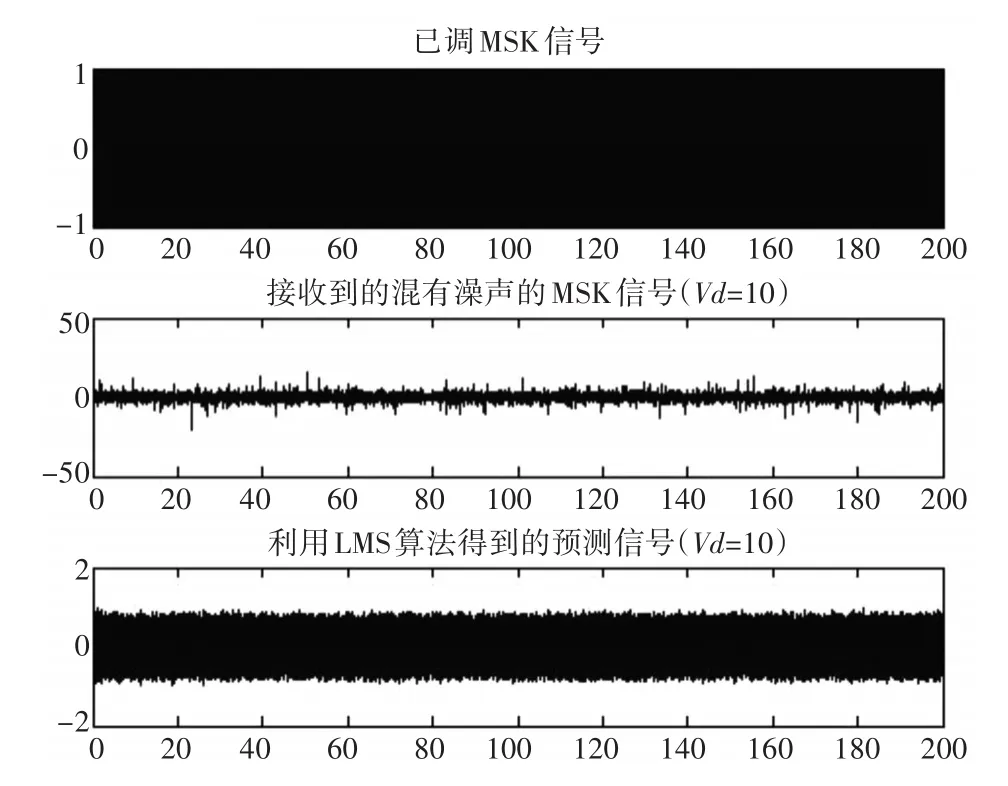
图7 误码率与信噪比对比曲线图
文献[12]认为大气噪声是一种窄带的随机过程,符合指数正态分布。电压偏差Vd值反应了大气噪声脉冲噪声的自然情况。通过输入的信噪比SNR和Vd来控制噪声比例,合成包含高斯背景噪声和脉冲噪声的大气噪声。分别控制Vd等于2、4、7、10等不同的值来控制脉冲噪声的强度,数值越大代表噪声强度越高。
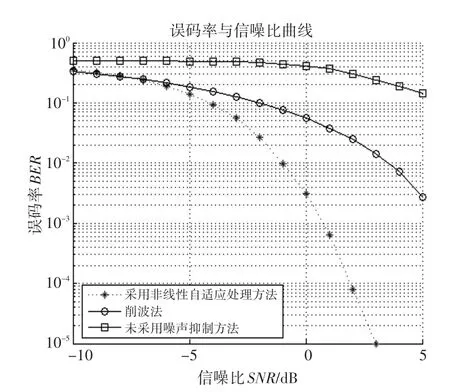
图6 三种信号波形对比图
图6分别为已调MSK信号、接收到的混有噪声的MSK信号,以及经非线性自适应算法之后的输出信号(Vd=10)。仿真结果显示,经过非线性自适应处理器处理之后,信号波形变得平滑,相位保持连续,在出现脉冲噪声的时段内,信号的波形依然连续,没有大的起伏。
图7为在相同信噪比下条件下采用不同处理方法的误码率对比曲线图(Vd=10)。由图可见,与单纯采用削波技术相比,采用非线性自适应噪声处理方法能够有效降低系统误码率。
4 结语
采用变步长LMS算法的自适应处理器有较快的收敛速度和稳态误差,并且能够有效抑制脉冲噪声的干扰。通过对系统的仿真及结果分析表明,受脉冲噪声干扰严重的通信系统,采用非线性自适应处理器能够有效提高系统接收的性能并降低系统误码率。
猜你喜欢
河北大学学报(自然科学版)(2022年3期)2022-06-16 01:30:10
雷达与对抗(2022年1期)2022-03-31 05:18:20
辽宁工业大学学报(自然科学版)(2020年1期)2020-01-07 01:09:48
电子设计工程(2015年12期)2015-02-27 12:06:20
汽车零部件(2014年1期)2014-09-21 11:41:11
单片机与嵌入式系统应用(2014年7期)2014-03-24 19:12:05
小青蛙报(2014年1期)2014-03-21 21:29:39
铁路通信信号工程技术(2014年3期)2014-02-28 16:56:24
测绘科学与工程(2013年5期)2013-03-11 15:07:50
甘肃教育(2012年24期)2012-04-29 00:44:03