
智能机器人巡检系统在综合管廊中的应用研究
2018-07-31 01:34谢军吴晓维汪胜
电气自动化 2018年2期
谢军,吴晓维,汪胜
(上海市城市建设设计研究总院(集团)有限公司,上海 200125)
0 引 言
综合管廊,即建于城市地下用于容纳两类及以上的城市工程管线的构筑物及附属设施[1]。综合管廊建设可以解决反复开挖路面、架空线网密集、管线事故频发等问题,提高城市综合承载能力和城镇化发展质量[2]。
基于现代传感技术、网络通信技术及计算机技术等信息化技术的综合管廊监控系统可以为综合管廊提供环境、设备、火灾、安防监控及通信服务,保障综合管廊安全运行和有效管理[3]。
目前,综合管廊基本采用人工定期巡检并结合综合管廊监控系统反馈的监控报警信息,进行日常管理及维护。然而,综合管廊一般具有舱室多、距离长及环境恶劣等特点,人工巡检劳动强度大,且不利于巡检人员的身心健康。此外,综合管廊监控系统只能做到定点监控,存在监控盲区。
智能机器人巡检系统在综合管廊中应用作为一种新型智能化巡检模式,可以有效减轻传统的人工巡检的巡检人员负担。作为一种移动式监控模式,又可以弥补综合管廊监控系统只能定点监控的缺陷,进一步提高综合管廊监控管理能力。
“环湖80米北岛西路综合管廊工程”位于上海市临港新城滴水湖附近北岛西路地下,全长约1 km,管廊断面(如图1所示)为综合舱及燃气舱双舱结构,主要收纳给排水、电力、通信及燃气等管线。整个管廊工程以不大于200 m设通风区间(兼防火区间),通风口与逃生口合建,并设控制中心一座。

图1 综合管廊标准断面图
作为上海市临港新城地区的试验段管廊,拟在本管廊工程综合舱中率先开展“智能机器人巡检系统”设计与应用研究。
1 方案比较
目前,智能机器人巡检系统主要有轮式及挂轨式两种,具体如表1所示。综合管廊为狭长空间,坡度较大,且布满各种管线,适合采用挂轨式智能机器人巡检系统。
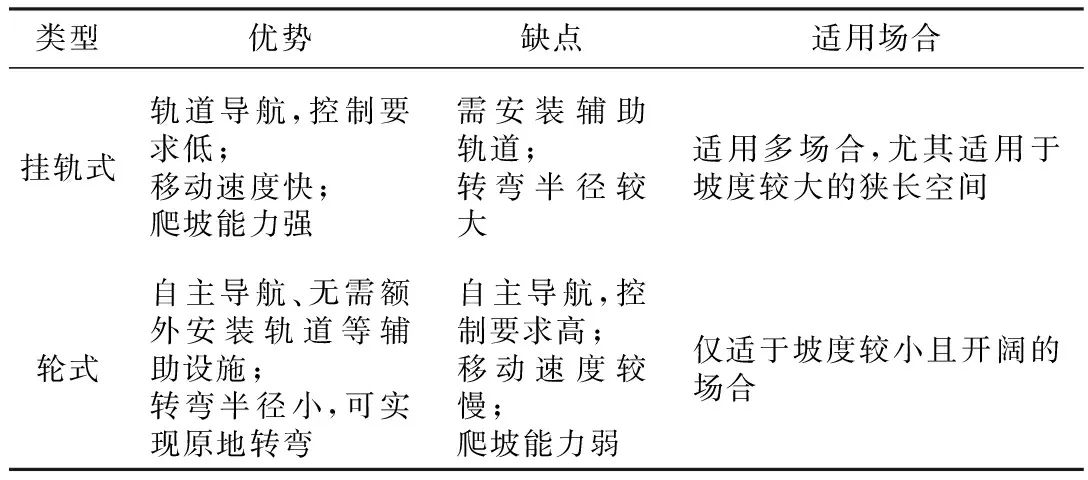
表1 轮式及挂轨式智能机器人巡检系统比较
2 挂轨式智能机器人巡检系统构成
通过表1比较可知,综合管廊适合采用挂轨式智能机器人巡检系统,其系统构成如图2所示,主要由挂轨式智能机器人、专用轨道、通信网络、专用防火门系统、专用充电系统及后台管理系统等组成。

图2 挂轨式智能机器人巡检系统
整个系统从上至下可分为后台监控管理层、中间通信服务层及前端巡检工作层。
后台监控管理层位于综合管廊控制中心,主要由工作站、服务器、存储器及展示设备等组成。后台监控管理层通过通信网络可以实现对智能机器人、专用防火门系统及专用充电系统等的远程监控管理,同时通过通信网络可以与综合管廊监控系统实现信息共享及联动操作,进一步提高综合管廊监控管理能力。
中间通信服务层主要由通信网络、专用轨道、专用防火门系统及专用充电系统等组成,为智能机器人提供通信网络、轨道、穿越防火墙及充电等配套服务。
前端巡检工作层主要由智能机器人及其配套设施(如移动装置、机械臂、蓄电池、智能摄像设备等)组成,按巡检排班计划执行自主巡检,并通过通信网络向后台管理系统上传巡检信息。
整个通信网络以光纤以太网环网(与管廊监控系统合建)为核心骨架,各设备通过有线或无线方式接入通信网络。其中,专用防火门系统及专用充电系统等通过有线以太网方式接入通信网络,智能机器人通过无线AP无线通信方式接入通信网络。
智能机器人配置智能控制装置,通过通信网络接收后台管理系统下发的巡检排班计划,自主执行巡检任务,并通过通信网络上传巡检数据。
智能机器人通过通信网络可以实现与专用防火门系统及专用充电系统等之间的联动操作。
后台管理系统通过通信网络可以实现对智能机器人、专用防火门系统及专用充电系统的远程监控管理。
3 挂轨式智能机器人巡检系统设计
3.1 控制系统设计
整个智能机器人巡检系统为一个智能控制系统,其核心为智能机器人。
智能机器人主要由智能控制装置、移动装置、作业装置、蓄电池、附属监控探测设备及附属应急处理设备等组成,如图3所示。
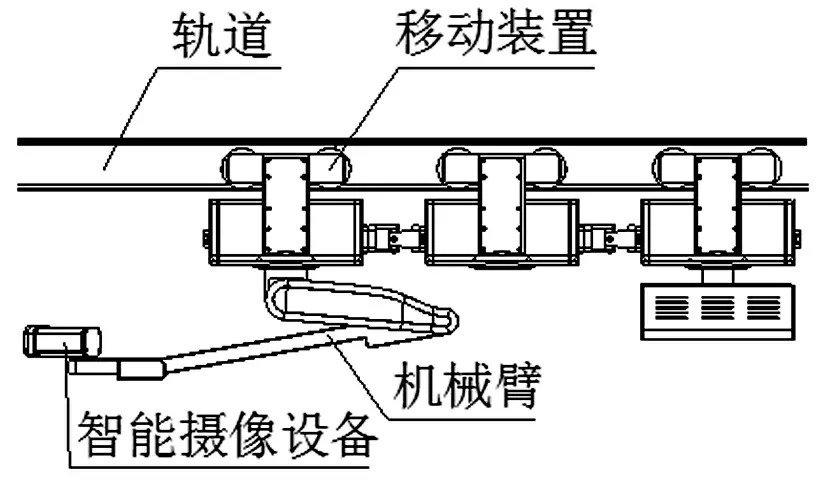
图3 智能机器人组成图

图4 智能控制装置逻辑结构图
智能控制装置主要由微处理器、存储器(RAM+ROM)、输入接口、输出接口、无线通信处理单元等组成,逻辑结构如图4所示。
移动装置指用于实现智能机器人沿轨道移动动作的一系列设施等,移动装置接受智能控制装置控制,实现一系列定速移动及变速移动等动作。
作业装置主要指机械臂等,接受智能控制装置控制,配合智能摄像设备等实现一系列近距离观察探测任务。
附属监控探测设备主要包括各类满足综合管廊巡检需求的必备探测设备(如温湿度探测器、氧含量探测器、硫化氢含量探测器等)及智能摄像设备等。附属监控探测设备能将采集到的数据信息上传给智能控制装置,由智能控制装置进行自主分析处理并通过通信网络上传给后台管理系统做进一步分析处理。
附属应急处理设备指用来代替人处理现场紧急情况的必备设备,可以根据运营的需求合理配置,如自动灭火用的超细干粉装置等。
3.2 控制流程设计

图5 智能机器人巡检系统控制流程图
整个智能机器人巡检系统为一个智能控制系统,可以自主完成数据采集、数据分析、应急处理,并通过通信网络与后台管理系统实现数据交互,其控制流程如图5所示。
主要控制过程及功能介绍如下:
(1)通过通信网络接收后台管理系统下发的巡检排班计划,按巡检排班计划执行巡检,并反馈巡检结果;
(2)通过通信网络接收后台管理人员的遥控巡检指令执行巡检,并反馈巡检结果;
(3)具备故障诊断功能,并通过通信网络及时将故障信息上传后台管理系统,提示后台管理人员及时安排维护计划;
(4)具备电池电量监测功能,当电量低时,通过通信网络向后台管理系统反馈报警信息并自主找到最近的专用充电系统进行充电;
(5)对附属监控探测设备监测数据进行智能分析,并通过通信网络上传数据至后台管理系统做进一步分析处理;
(6)具备无线通信控制及诊断功能,实现在各无线AP之间的快速切换;
(7)具备存储功能,当无线通信网络不佳时,可以暂时缓存相关数据,当无线通信网络良好时,可以重新上传缓存数据至后台管理系统;
(8)具备自适应功能,可以根据轨道的坡度及弯度自适应调节移动速度;
(9)向后台管理系统提供位置信息,并反馈巡检完成情况;
(10)自主进行应急处理,指挥机械手臂等装置进行近距离观察探测。
4 工程应用
“环湖80米北岛西路综合管廊工程”的“挂轨式智能机器人巡检系统”主要方案如图6所示。
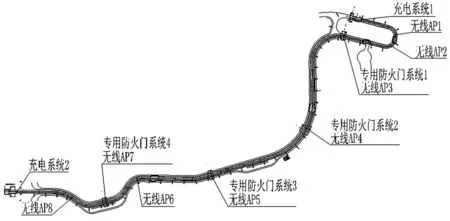
图6 智能机器人巡检系统布置图
沿管廊综合舱中间顶部敷设一套智能机器人专用轨道,轨道坡度及转弯半径适合智能机器人正常巡检移动需求。
布置一套光纤以太网环网(与管廊监控系统通信网络合建),作为整个系统的核心通信网络。
在管廊综合舱每个防火分区布置一套无线AP,在管廊转弯处及信号比较弱的地方增加无线AP布置点。各无线AP通过有线以太网方式接入通信网络。

图7 机器人专用防火门系统
在管廊综合舱每个防火墙防火门上方设置一套适合智能机器人通过的专用防火门及其控制系统(如图7所示),其控制系统通过有线以太网方式接入通信网络。
在管廊综合舱两端各设置一套智能机器人专用充电系统,便于机器人充电及日常保养,充电系统通过有线以太网方式接入通信网络。
在管廊综合舱布置一套挂轨式智能机器人,智能机器人配置智能控制装置,通过无线AP无线通信方式接入通信网络。智能机器人可以根据巡检排班计划自主执行巡检任务,并通过通信网络与后台管理系统进行信息交互。
5 结束语
挂轨式智能机器人巡检系统具有巡检路线固定、爬坡能力强及控制方案简单等优点,适合综合管廊狭长空间。挂轨式智能机器人巡检系统与综合管廊监控系统建立通信,实现信息共享,优势互补,进一步提高综合管廊监控管理能力。
猜你喜欢
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
中学生数理化·中考版(2021年10期)2021-11-22
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
安全(2020年2期)2020-04-16
江西建材(2018年2期)2018-04-14
读者·校园版(2018年3期)2018-01-18
家庭影院技术(2017年12期)2017-02-06
风采童装(2016年2期)2016-08-02
中国工程咨询(2016年2期)2016-02-14
