
基于激光测距原理对大宗散货盘点问题研究∗
2018-07-31 02:06马启晟
计算机与数字工程 2018年7期
马启晟
(中国电子科技集团公司第二十研究所 西安 710000)
1 引言
本文旨在设计一种大宗散货盘点系统,并以煤炭为试验对象。目前针对煤场盘点的产品主要分为便携式盘煤仪和固定式盘煤仪。便携式盘煤仪依赖人工操作,劳动强度大,操作要求比较高;固定式盘煤仪虽然减少了便携式盘煤仪的人工打点操作,但却存在不可避免的扫描盲区,无法对整个堆场的每个煤垛均进行有效盘点[1]。可见,探索新型、高效、智能的盘点系统是散货科学管理领域中非常重要的课题,也是现代化的管理手段不可缺少的部分[2]。
2 大宗散货盘点系统总体设计
2.1 大宗散货盘点系统功能
本系统将实现快速、准确盘煤,现场测量人员只需手提测量终端设备围绕储煤基地任意被测煤垛行走一周,即可快捷、高效地完成对煤垛的盘点[3]。采集数据包括二维激光扫描数据、可见光图像、电子罗盘数据、动态倾角传感器数据与GPS定位数据[4~5]。所有数据可通过无线数据传输模块传输至分析计算平台,在分析计算平台对被测散货堆进行激光三维图像生成、可见光三维图像生成、三维数据融合以及体积计算等工作[6~7]。
2.2 大宗散货盘点系统工作模式
本系统设计了两种测量方式,手提式与定点式。
1)手提式测量模式
手提式工作模式下,现场测量人员只需手提测量终端设备围绕任意被测散货堆行走一周,即可完成对散货堆快捷、高效的体积测量。如下图1所示。

图1 手提式工作模式下测试示意图
2)定点式测量模式
定点式工作模式下,测量人员围绕被测散货堆选择几个测量点,在每个测量点对散货堆进行数据采集,数据采集完成后,由分析计算平台将各个测量点的测量数据进行整合并处理,完成体积测量。测量示意图如下图2所示。
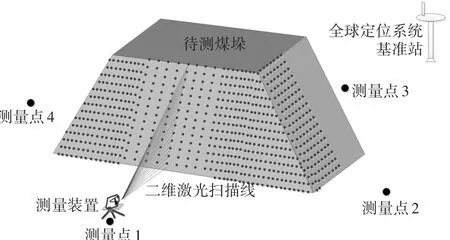
图2 定点式工作模式下测试示意图
2.3 大宗散货盘点系统总体构成
按照系统结构的设计安排,大宗散货盘点系统的软件也相应由三部分组成,具体组成如图4所示[8]。
本论文中设计并实现基站设备初始化模块、基站数据采集模块、手提测量终端设备初始化模块、手提测量终端工作模式选择模块、手提测量终端数据采集模块、手提测量终端数据传输模块、分析计算平台数据传输模块这七个模块的软件编写及测试。以下将此七个模块统称为数据采集软件。

图3 系统结构

图4 盘点系统软件结构
2.4 大宗散货盘点系统硬件结构
手提移动终端硬件系统如图5所示。
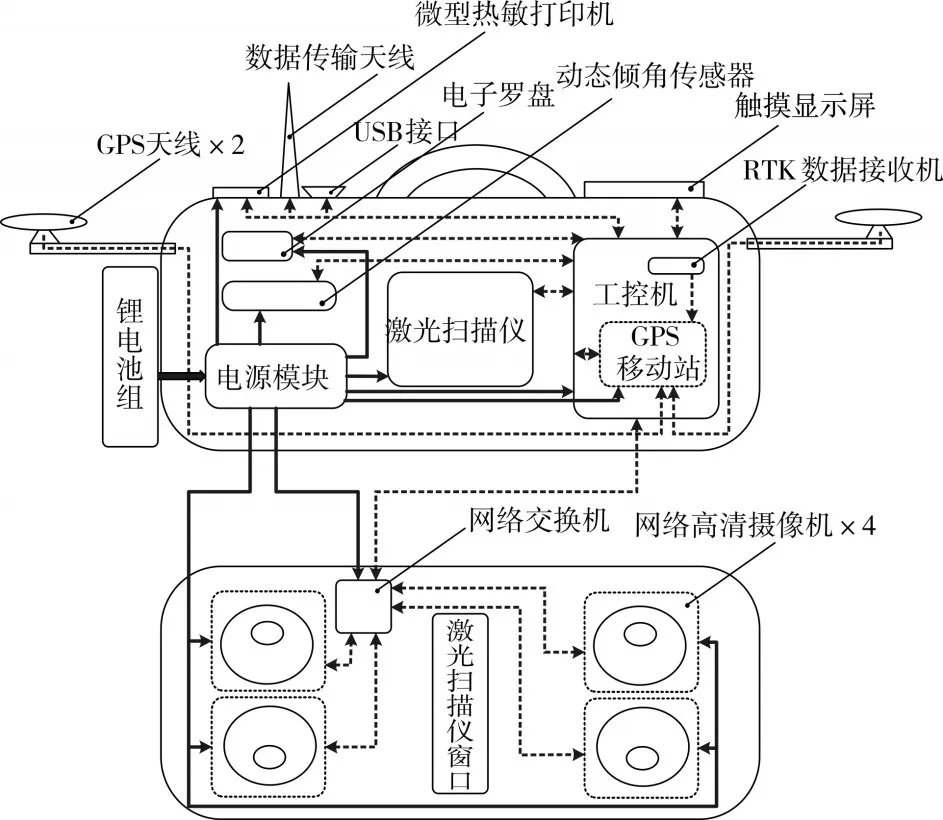
图5 手提移动终端硬件系统(实线代表供电,虚线代表数据)
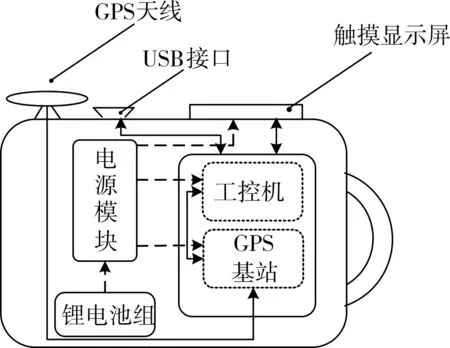
图6 基站硬件系统组成
基站硬件系统如图6所示,虚线代表供电,实线代表数据。
3 数据采集软件的设计与实现
3.1 数据采集软件的输入数据接口设置
接收的数据主要来自二维激光扫描仪、GPS、电子罗盘、高清摄像机、动态倾角传感器、电动转台、微型热敏打印机。
1)二维激光扫描仪LD-MRS-511通过网口连接工控机,数据输出频率25Hz,角度分辨率0.1667°。
2)GPS Trimble BD982通过串口连接工控机。串口输出数据频率为50Hz。
3)高清摄像机DS-2CD7153-E通过网口连接工控机。
4)电子罗盘HEC365通过串口连接工控机,数据输出频率50Hz。
5)动态倾角传感器QT304通过串口连接工控机,数据输出频率50Hz。
6)电动转台通过串口连接工控机。
7)微型热敏打印机RMD8通过串口连接工控机。
3.2 数据采集软件的输出数据接口
手提移动终端发送给分析计算平台的数据主要有:二维激光点数据、GPS定位数据及航向数据、罗盘数据、动态倾角传感器数据、可见光图像数据。
1)二维激光点数据
采集处理后的二维激光点数据如图7所示。
图7 采集处理后的二维激光点数据
2)GPS定位数据及航向数据
采集处理后的GPS定位数据及航向数据如下图8所示。

图8 采集处理后的GPS定位数据及航向数据
3)罗盘数据
采集处理后的罗盘数据如下图9所示。
图9 采集处理后的罗盘数据
4)动态倾角传感器数据
采集处理后的动态倾角传感器数据如下图10所示。
图10 采集处理后的动态倾角传感器数据
5)可见光图像数据
图像采集后记录图像名称的文本以摄像机A为例,如图11所示。
图11 摄像机A拍摄图像名数据
4 大宗散货盘点系统测试
4.1 设备精度测试
1)GPS定位精度测试
将GPS定位模块静止放置测量一段时间,得到静态经纬度坐标(即水平定位)和高程测量值(即高程定位),取平均值为定位数据真值,则测量值的抖动范围,即可视为GPS的定位误差。图12为GPS定位精度测试实验图。
现场测试中,手提式工作模式下,以“09场11垛201412131246”为例,给出可见光图像、体积打印结果以及煤堆体积网格图。9场11垛为一小型垛,周长约260m,行走一周三分钟左右。测量过程中黄骅港工作人员使用便携式盘煤仪同时测量,进行对比。

图12 GPS精度测试实验图
水平定位包括东西南北四个方向,以东西为X轴,南北为Y轴,GPS的水平定位如图13所示。高程定位主要为在海拔高度的定位,以竖直向上为Z轴,高程数据如图14所示。

图13 水平定位精度图

图14 高程定位精度图
对图13、图14中数据进行标准差计算,水平定位标准差为3.1mm,高程测量的标准差为8.6680mm。以横纵坐标平均值组成的点(1.7494,10.9757)为圆心,以8mm为半径,实验过程中采集到的10297个点,有10106个点在圆内,所占比例99.7%,大于67%(1sigma)的合格率。计算高程平均值为6.5372mm,以平均值为高程真值,共采集10297个点,有9560个点在[真值-15mm,真值+15mm]区间内,所占比例92.84%,大于67%(1sig⁃ma)的合格率。符合Trimble BD982的精度指标。
2)电子罗盘精度测试
将电子罗盘静止放置测量,取平均值为方向角真值,图15为电子罗盘静止情况下测得的方向角数据。方向角平均值为26.0923°,各测量点与平均值之间最大差值为0.3493°,标准差为0.0492°,符合HEC365的偏航角精度指标。

图15 方向角静态测量数据
3)动态倾角传感器精度测试
将动态倾角传感器静止测量,以平均值为真值。图16、图17分别为动态倾角传感器静止情况下测得的俯仰角、横滚角数据。

图16 俯仰角静态测量数据

图17 横滚角静态测量数据
俯仰角平均值为0.3874°,各测量点与平均值之间最大差值为0.0374°,标准差为0.0093°。横滚角平均值为2.4263°,各测量点与平均值之间最大差值为0.0637°,标准差为0.0111°。符合QT304的精度指标。
4)激光扫描仪精度测试
二维激光扫描仪LMS511,数据输出频率25Hz,角度分辨率0.1667°,输出角度120°,每条扫描线720个点。将二维激光扫描仪如图18所示放置测量。

图18 激光扫描仪精度测试实验放置图
共采集1472条扫描线,实验过程中激光扫描仪静止放置,因此这1472条扫描线可看作各点在同一位置分别测量了1472次,对各点的1472次测量值求标准差[9~10]。图19为墙面上取199点的各点标准差图。图20为本次激光扫描仪精度测试的激光点云图。
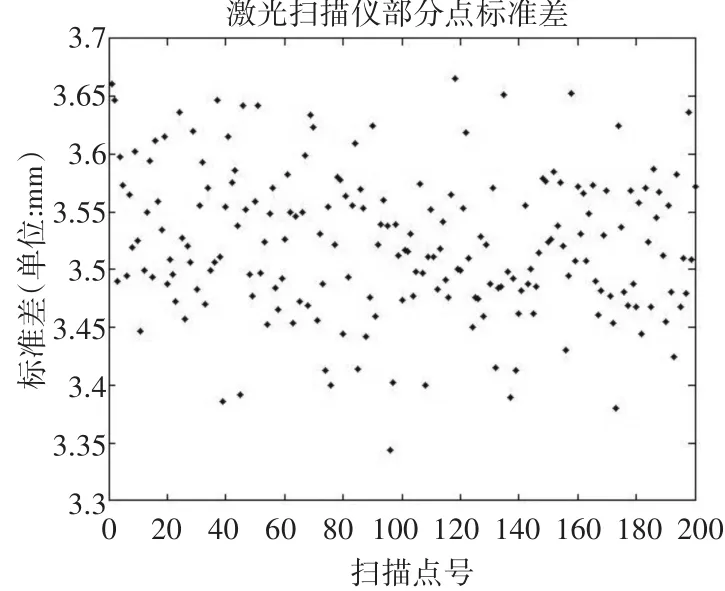
图19 激光扫描仪各点标准差
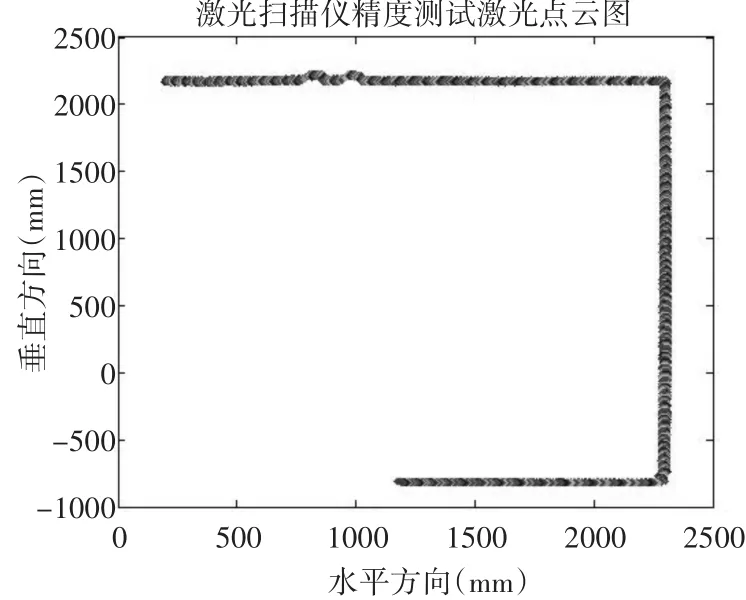
图20 激光扫描仪精度测试激光点云图
对图19的数据分析发现,标准差最大为3.6653mm,平均值为3.5218mm。从图20可以看出,激光点云图里画出的墙面有一定厚度,此厚度可看成激光扫描仪测量精度,墙面厚度最大为23mm,符合LD-MRS-511的精度指标。
4.2 大宗散货盘点系统整体测试
1)模拟堆体下盘点系统整体测试:充气模型如图21所示。

图21 模拟堆体模型
数据采集软件采集数据经过分析计算平台生成激光点云图[11~12],如图22所示。
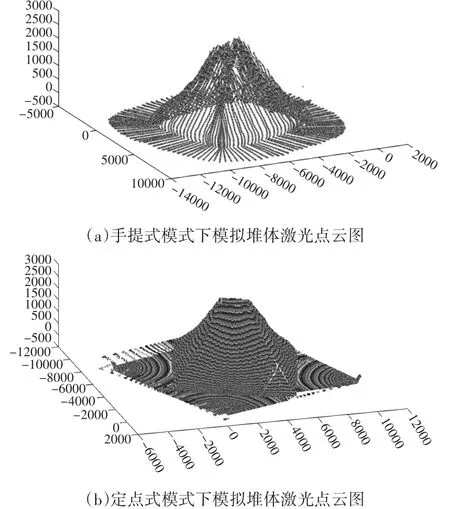
图22 激光点云图
定点式工作模式下模拟堆体的激光点更密集,盘点系统可以获得被测散货堆更多的细节信息,体积计算精度较高[13]。手提式工作模式下盘点系统具有操作简单、质量轻、测量速度快、无需选择测量点等优点[14]。
2)实际煤场环境下盘点系统整体测试:2014年12月13日在河北省沧州市黄骅港实际测量煤堆体积,现场测试如图23所示。

图23 实验现场场景
(1)高清摄像机数据结果
图24为“9场11垛12131246”测量数据中四个摄像机现场实际拍摄图像中的一组。
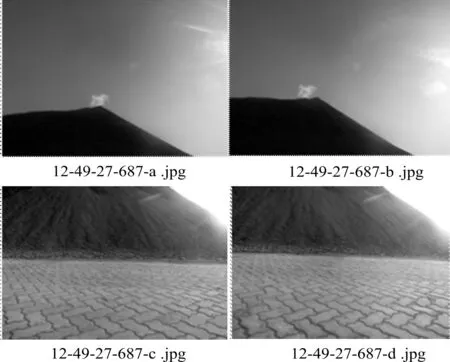
图24 摄像机图像
(2)打印机打印体积结果
体积为12810m3。打印体积结果如下图25所示。

图25 体积结果
(3)整体测试结果
“9场11垛12131246”网格图如图26所示。
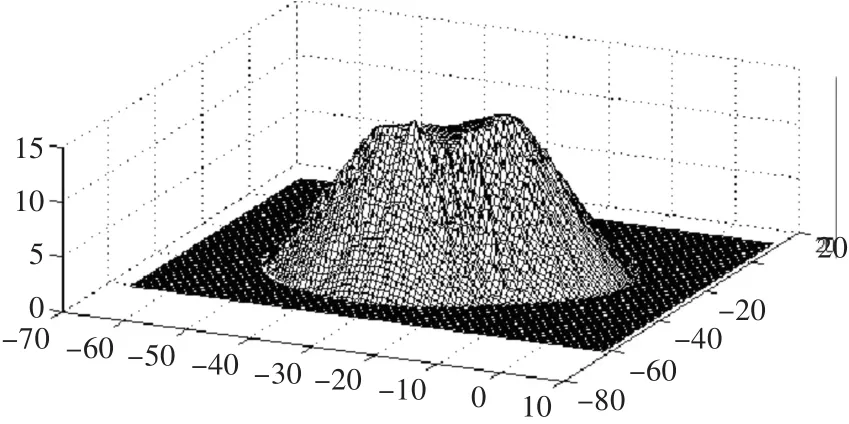
图26 煤堆网格图
计算体积为12810m3,测量时间3分17秒,无需设置基准点,可立刻算得体积结果,可以测量不规则煤垛。黄骅港工作人员使用便携式盘煤仪对此垛进行测量,体积为12827m3,测量时间20min,需设置基准点,后期体积计算软件处理后才能算得体积结果,测量不规则煤垛误差大[15]。
5 结语
本文从硬件设计、软件的设计与数据采集软件的实现等方面进行了详细的介绍,并给出了软件设计接口以及黄骅港现场实验的数据,在经过大量测试,数据采集软件采集到的数据经过分析计算平台计算得到正确的体积结果,达到了软件预期的效果。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
今日农业(2021年12期)2021-10-14
计算机技术与发展(2020年9期)2020-11-26
World Journal of Cardiology(2020年10期)2020-11-25
科技与创新(2019年1期)2019-11-29
科技创新导报(2017年10期)2017-06-19
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
医学理论与实践(2012年4期)2012-12-09
