
基于四旋翼的火灾检测系统的设计∗
2018-07-31 02:06魏雅
计算机与数字工程 2018年7期
魏 雅
(陕西工业职业技术学院 咸阳 712000)
1 引言
传统的火灾监测的方式主要有人工巡航、卫星监测、定点监控、空中巡逻等。当前,随着经济基础的日益改善及生活水平的提高,火灾发生率也增高了,消防人员所面临的消防灭火和救援任务也变的复杂,针对各类山林火灾,次生灾害或高层火灾等情况,传统的现场侦查监测方式的局限性已日益凸显,侦查手段的落后所带来的生命和财产损失不可估量。国内外也设计了用于火灾探测、监测和灭火的多协同工作的无人机系统。他们主要着重于通过对森林的全方位监测,实现对灾害现场发展情况的准确把握,寻找着火点。但不能为救援提供火灾现场环境的相关数据。
本系统设计一套基于四旋翼飞行器平台的火灾检测装置,将解决和弥补开阔区域发生火灾时和灾后次生灾害监测过程中,传统感温、感烟等监测手段和方法的局限性[1]。可以通过系统装置完成温度、烟雾检测,以及航拍监测的任务,并将检测的数据即时返回控制中心,控制中心根据检测的数据及时做出应急处理。
2 飞行器控制算法
监测飞行装置的姿态控制包括纵向运动、悬停运动、俯仰运动、偏航运动、翻转运动、前后运动、左右运动姿态的控制。在设计中通过建立飞行器的动力学模型、设计PID控制器来对飞行装置进行姿态控制,通过对PID控制算法[8]的设计及模拟确定监测装置。
因为四旋翼飞行器的控制比较复杂,所以将四旋翼飞行器视为一个均匀对称体,其重心放在飞行器的几何中心,将机体坐标系的原点与飞行器重心位置重合;忽略飞行器近地飞行时的地效效应,空气阻力仅与飞行速度相关;认为螺旋桨产生的升力与旋翼转速的平方成正比,产生的反扭矩大小也与旋翼转速的平方成正比[2]。建立数学模型,然后根据PID控制算法的要求,在Matlab环境下采用试凑法获取参数值,再将PID控制器与动力学模型联立起来,建立四旋翼控制器模型。经过仿真得到对应的仿真曲线,通过曲线观察,表明PID控制器下系统有较好的动态响应速度,有较小的稳态误差和较小的超调量,系统的动态性能较好。
3 四旋翼飞行器的动力学模型建立和PID控制
3.1 四旋翼飞行器的动力学模型建立
系统中采用牛顿欧拉方程建立动力学模型,在惯性坐标系E(OXYZ)和机体坐标系B(OXYZ)下,写出飞行器的惯性矩阵,通过牛顿欧拉方程表达式写出其中姿态角矩阵,再得到机体坐标系到惯性坐标系转换矩阵。因四旋翼飞行器所受力包括:旋翼升力,竖直向下的机体重力,与运动方向相反的空气阻力,所以可以通过牛顿欧拉方程、机体坐标系到惯性坐标系转换矩阵、地面坐标系下四旋翼飞行器合力三个公式联立,可得到四旋翼飞行器线运动模型方程如下:
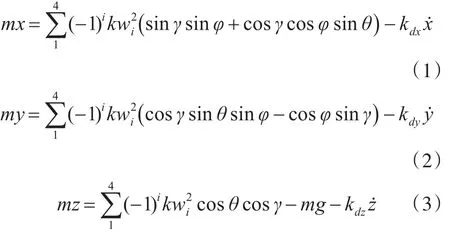
四旋翼飞行器飞行过程中所受力矩为

其中kd为空气阻力系数。最后得到飞行器的力矩表达式:
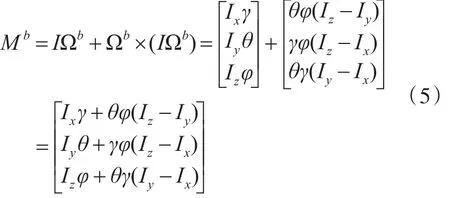
由式(4)、(5)整理可得到飞行器的角运动方程如下:

式中k为与空气密度以及飞行器移动时的速度方向垂直的有效面积有关的一常量,式(1~3)和式(6~8)即为系统所建立的四旋翼飞行器动力学模型。考虑到在无风或慢速飞行条件下,角度变化率几乎为零,所以通过以上联立可将平衡点位置四旋翼飞行器动力学模型简化为

3.2 PID控制
根据建立的PID模型设计,PID控制传递函数表示为

设定在稳定飞行中,电动机的负载为常量,电动机的电动机的动力学模型可写作:

通过多次飞行试验以获得飞行器相关数据和PID仿真参数,如表1所示。其中K为升力系数,d为反扭矩系数。
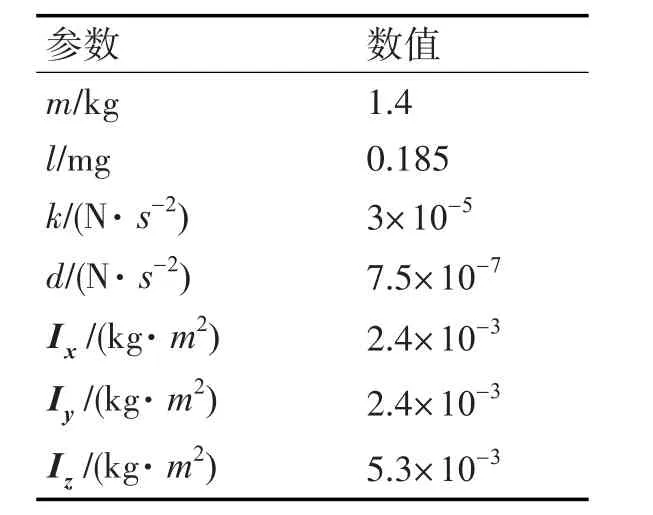
表1 四旋翼飞行器相关参数表

接下通过试凑法获参数值,如表2所示。
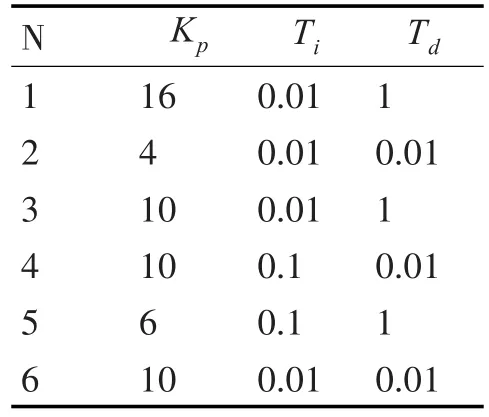
表2 仿真参数取值表
把相关参数代入四旋翼飞行器数学模型和PID控制器传递函数中,在Matlab环境下编程,仿真获得阶跃响应曲线。从仿真曲线可以看出在PID控制器下系统有较好的动态响应速度,有较小的稳态误差
4 控制系统的硬件组成
基于四旋翼飞行器[2]的装置主要解决飞行平稳控制和火灾监测两个方面的主要功能。根据需求功能的要求,设计的系统硬件如下所示。
4.1 微处理器选择
监测飞行器的核心器件采用的是由ATMEL公司生产的ATMEGA2560微处理器。它可接收八通道的PWM输入和八通道的PWM输出,采用的时钟频 率为 16MHz,EEPROM 为 4KÎ8,接口 类型有JTAG、SPI、USART。它连接着各个传感器和接收机,负责整个飞行控制信号的校正计算和输出,同时协调配合各个传感器协同工作。
4.2 传感器选择
传感器[3]的作用相当于飞行装置的感官,直接影响飞行器完成监测任务的准确性。根据在满足检测要求的同时,具有功耗低、可靠性好、体积小、重量轻的原则选择对应的传感器。飞行器方位的确定选取的是HMC5883罗盘[13]。加速度和姿态角的测量采用的是整合了三轴陀螺仪和三轴加速度的六轴MEMS传感器MPU6000[12]。通过它时刻采集飞行器的姿态角和运动加速度,来调节飞行器的平稳飞行和实时控制[14]。在火灾及次生灾害监测中的温度与烟雾的检测采用的是支持“单总线”接口的数字式温度传感器DS18B20及具有检测液化气、甲烷、丙烷、丁烷、烟雾等的烟雾传感器MQ-2。MQ-2检测电路[5]将烟雾信号转换成模拟量,经模数转换器[5]ADS0832转换成电信号,传递给单片机处理。在无明火的情形下,监测装置监测到的温度值和烟雾浓度值均大于相应的临界值时,蜂鸣器报警,同时点亮PAO口的灯,预示着暗火复燃的可能性较大,可能发生次生灾害的危险。
4.3 硬件组成框图
据功能分析,整个硬件系统包括控制器模块、传感器模块、电机控制模块和无线通信模块。系统的硬件组成框图如图1所示。
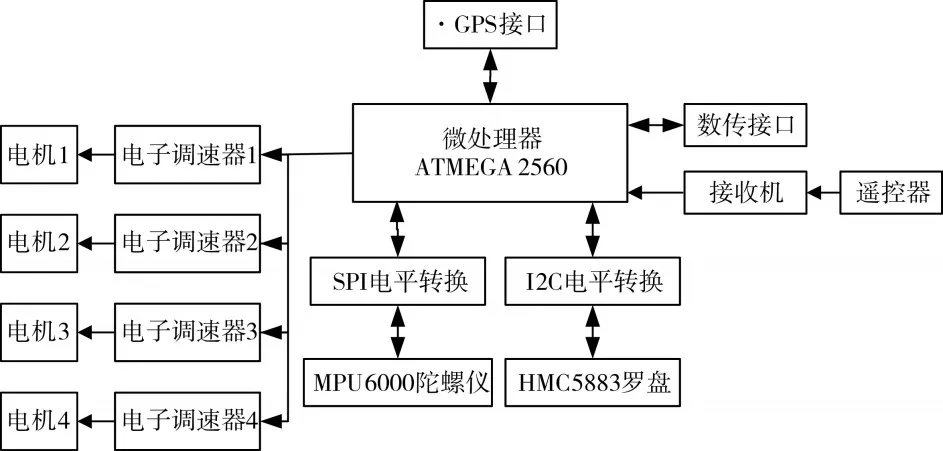
图1 系统硬件组成框图
在系统控制中,微处理器控制信号经电子调速器,通过I2C总线控制电机转速,并由电子调速器提供电源,电机带动四旋翼旋转,为整个飞行器的运动提供升力,通过控制电动机的转速,实现翻转,俯仰,偏航等姿态运动[8]的变化。
在整个过程中,通过无线通信模块完成整个飞控地面站与飞行器间的通信,地面站接收飞行器发送的数据,并发送控制信号。无线数据传输模块完成平台温度、烟雾信号的无线传输接收任务,并进行信号数据处理、显示;遥控发送机和接收机担负整个飞行器的姿态控制;无线视频传输模块完成监测视频信号的传输、处理、显示。
5 软件设计与调试
5.1 温度处理程序设计
温度检测部分使用的是稳定性较好的DS18B20传感器芯片[4],它集成了温度检测和数据传输的功能,所以在编写程序时只要按照工作周期检测温度和数据处理[6]即可。将读取的环境温度直观的显示在 LCD1602[7]显示屏上。
单片机读取温度的步骤包括:1)跳过ROM操作;2)发送温度转换命令;3)跳过ROM操作;4)发送读取温度值命令;5)读取温度值,其操作程序流程图[4]如图2所示。要注意,DS18B20经转换所得的温度值是以二进制补码的形式存放在高速暂存存储器中,最后需进行进制的转换。
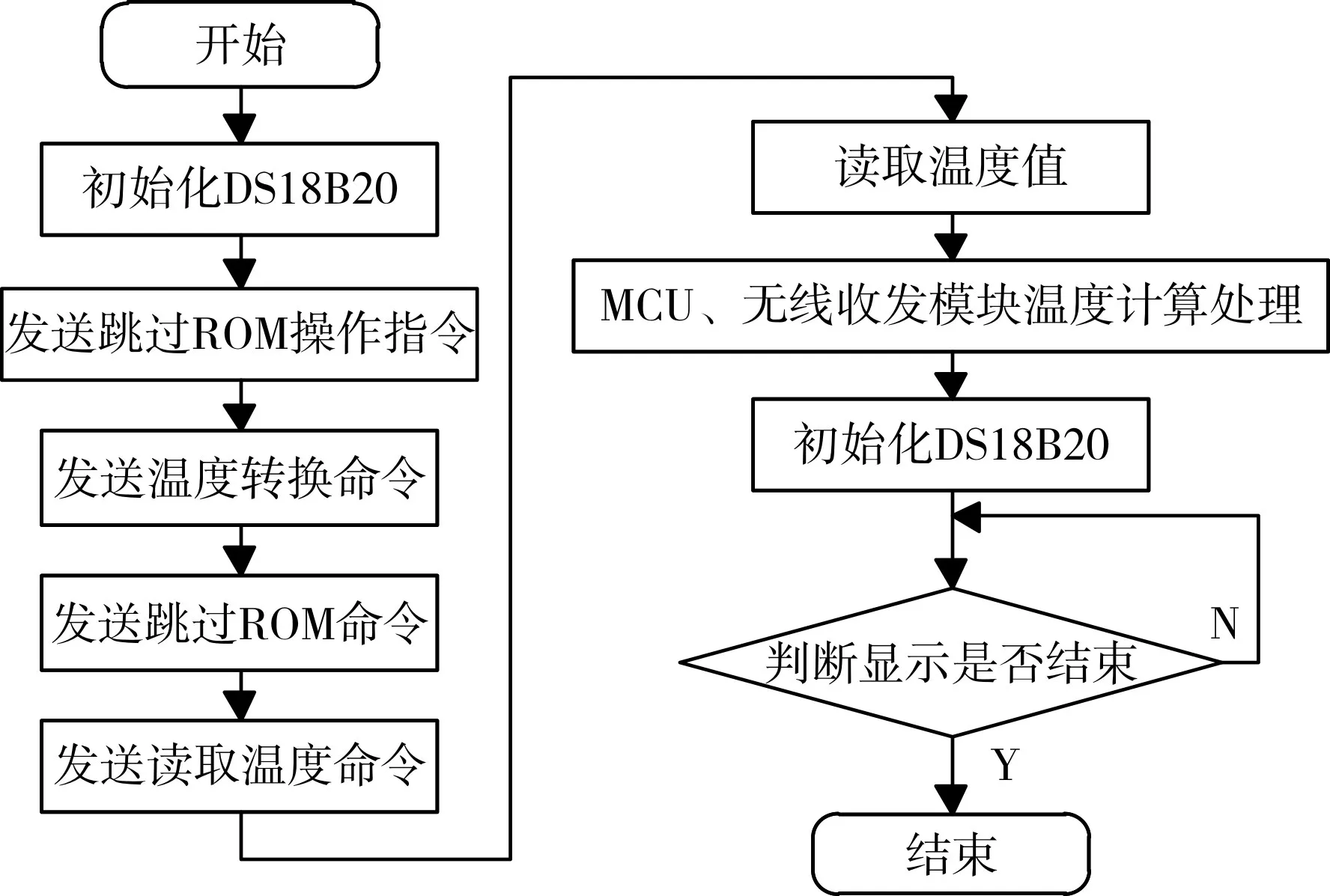
图2 DS18B20程序设计流程
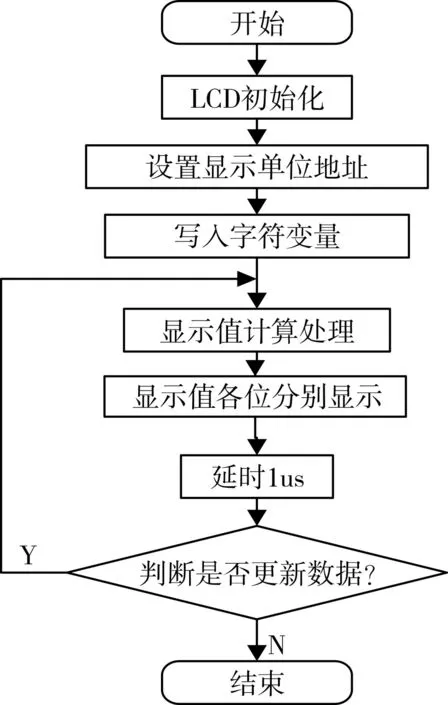
图3 显示部分的流程图
5.2 显示部分程序设计
温度显示部分采用的是LCD1602液晶显示。LCD1602液晶显示屏写进的数据是以ASCII码识别的,因此写进的数据也必须是ASCII形式的,操作前需对显示器进行初始化,对各个命令数据的写入没有先后顺序,每次写入数据完成后需将使能端置为低电平,为下一数据的写入做准备。显示部分的流程图如图3所示。
5.3 无线传输模块子程序设计
根据表3所示,在程序设计中,首先是通过对SPI口的配置[9],单片机按照时序将要发送的数据和接收机的地址传送给nRF905发射端;其次是通过对TRX_CE和TX_EN端口的定义,来激活nRF905的Shock Burst TM发送模式;开启发送模式之后,nRF905会将数据不断重发,直到检测到TRX_CE被拉低,nRF905发送过程完成并自动进入空闲模式[11]。程序流程图如图4所示。

表3 nRF905工作模式

图4 nRF905发送模式程序流程图
nRF905接收端接收数据[10]时首先进行初始化;然后由单片机设置TRX_CE、TX_EN端口电平,接收端进入接收模式;650us后接收端不断检测,等待数据接收;当接收端检测到属于同一频段的载波时,载波引脚CD被置高;当检测到相匹配的地址时,地址匹配引脚AM会被置高,开始进行数据接收;数据接收完毕后进行CRC校验,校验错误后,重新回到接收数据阶段,校验正确,单片机将TRX_CE拉低,nRF905进入空闲模式,至此完成一个数据包的传输[15],程序流程图如图5所示。

图5 nRF905接收模式程序流程
6 硬件的调试运行
将各个模块连接完成后,对各个模块进行硬件调试,保证各个模块能正常运作。
6.1 无线通信模块调试
飞行器无线通信模块调试包括三部分:遥控器、无线图传和无线数传调试。遥控器采用的是地址码加自动变频方式的2.4G模型产品。首先将遥控器接收机与发送机进行配对,若接收机红色信号灯不再闪烁,表明配对成功。其次完成遥控器与飞控芯片的校准。校准的目的是为了建立飞行器与遥控器之间联系,设置遥控器各个通道数行程量[8],并设置飞行模式,通过校准,当油门通道行程量为760,翻转通道行程量为665,偏航通道行程量为659,俯仰通道行程量为780,飞行模式转换通道行程量1023时,系统较稳定。
在无线图传模块的调试中,只需正确连接飞控芯片、OSD、相机、图传发射机、接收机、显示屏后,启动电源,将图传发射机与接收机调节到同一频道,即可在显示器上呈现飞行器监控画面。
飞行器的方位确定主要通过罗盘完成,所以罗盘的校准成功与否,直接关系到飞行器方位的确定。对新的罗盘,将其与飞控芯片APM,飞控地面站相连接,经多次实时旋转罗盘,最终可获得校正后罗盘的偏移量X:-97,Y:5,Z:0。校准后将罗盘正前方与当地方位正北方同向,观察地面站罗盘指向,若为正北向则说明罗盘校准成功,否则,需重新校准。
6.2 综合调试
通过对各模块调试后,再正确连接各个功能模块,接通监测装置电源,打开遥控器电源,接通无线图传接收机电源,短时间内,飞控板上红蓝显示灯间隔闪烁,此后蓝灯常亮,红灯间隔闪烁,代表此时GPS已搜索到卫星,搜索到的卫星数量可在地面站或显示屏上查看。若显示屏上无监测图像和相关参数显示,则要调整图传接收机与发射机是否同频道,其次检查信号整合模块OSD的视频输入与输出是否正确连接。再对飞行器控制进行调试。手摇控制器采用的是美国手遥控器,它的解锁方式是油门向下右侧压低3s左右,待飞控板上信号灯红灯停止闪烁,松开油门,表示电子调速器已成功解锁,飞行器已准备好,可以起飞。若无法解锁,检查遥控器油门行程量设置是否过小;或者罗盘校准不够准确;则需重新设置遥控器油门行程和校准罗盘。推动油门,带桨电机旋转,手持飞行器,将油门推到飞行器即将脱离地面位置,测试遥控器方向通道是否正常,遥控器方向杆打向左,手臂会感觉受到一个向左的力,方向杆打前,手臂会受到一个向前的力,表明飞行器程序运行正常,此时便可以去户外试飞。若出现方向杆动作方向与飞行器运行方向相反的情况,需修改出厂设置的遥控器编码。经过多次调试就能正式飞行了。
7 结语
本系统通过硬件和软件两个方面的设计,通过建立PID控制模型,采用试凑法,获得各个通道的参数值。最后将硬件软件综合起来,测试各个功能模块和软件的运行情况,并给出一些调试的方法。通过模拟实验来测试飞行器飞行性能和获取次生灾害中暗火复燃温度、烟雾浓度的临界范围,并提出了通过对火灾后环境温度值和烟雾浓度值的分析,来共同判定次生灾害中暗火复燃的可能性。实验的结果证明,监测设备基本能完成对火灾现场的实时监控,并能实现对次生灾害中暗火复燃的实时预警。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
小猕猴学习画刊(2021年8期)2021-08-27
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子技术与软件工程(2021年23期)2021-03-08
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
电子制作(2019年9期)2019-05-30
知识就是力量(2019年12期)2019-01-14
电子制作(2018年19期)2018-11-14
