
移相全桥变换器在电动汽车充电单元中的应用
2018-07-31 07:36:32张振东
能源研究与信息 2018年2期
仇 杰,张振东
(1. 上海理工大学,机械工程学院,上海 200093;2. 上汽集团乘用车技术中心,上海 201804)
大容量电池技术和高性能驱动电机技术的不断进步,推动了电动汽车行业的深入发展和商品化进程。伴随着电动汽车保有量的不断增加,电动汽车充电站的需求也在日益扩大。充电单元将电动汽车与充电站连接,并对电动汽车的整个充电过程进行实时控制。如何设计响应迅速、充电过程平稳的充电单元已经成为电动汽车厂商和科研院所的重要研究课题。
针对电动汽车充电方法,国内科研单位已经展开了许多研究工作。徐伟等[1]针对电动汽车高功率因数的充电要求,开发了一种具有功率因数校正功能的电动汽车充电系统,并运用 Saber软件对所设计的充电单元进行了仿真,验证了其达到了较好的效果。朱光欢等[2]利用CAN总线实现充电单元和电池组控制器的通讯交互,设计了实时监控电池组状态的控制单元,实现了一种智能充电方式。胡超等[3]则通过模块化结构设计的方法开发了一种直流充电单元,并进行了工程应用。甘屹等[4]设计了电池均衡充电方案,补偿了电池容量的差异性。近年来,国内很多学者对电动汽车充电单元进行了详尽的研究,并获得了较好的研究成果[5-8]。
电动汽车充电单元的核心电源变换器作为电能变换的关键技术,一直受到国外科研人员的重视。Gorla等[9]利用辅助电流系统设计了一个移相全桥DC–DC变换器,实现了变换器主动软开关的功能[9]。Vlatko 等[10]针对移相全桥变换器在小信号情况下进行了详细的分析。王均等[11]则通过建立变换器离散域数学模型,分析了影响移相全桥系统稳定性的因素,并基于补偿网络的设计方法,实现了一种直接数字式峰值电流控制模式的全桥变换器。
本文从电动汽车充电单元的工作原理出发,详细分析基于峰值电流控制模式的移相全桥电源变换器和补偿网络的基本理论及其在电动汽车上的应用。以PIC16F887单片机为核心设计一套电动汽车充电控制单元,并最终通过实验对比验证该方法的可行性。
1 充电单元基本工作原理
本文设计的电动汽车充电控制单元采用基于峰值电流控制模式的移相全桥变换器,其基本原理如图1所示,图中:Q1~Q6均表示MOS管即晶体管;RLD为电阻;C1~C6、Cf均表示电容;Lr、Lp、Ls1、Ls2、Lf均表示电感。该电路包括两部分:①移相全桥全波整流电路;②峰值电流 Buck 降压电路[12]。
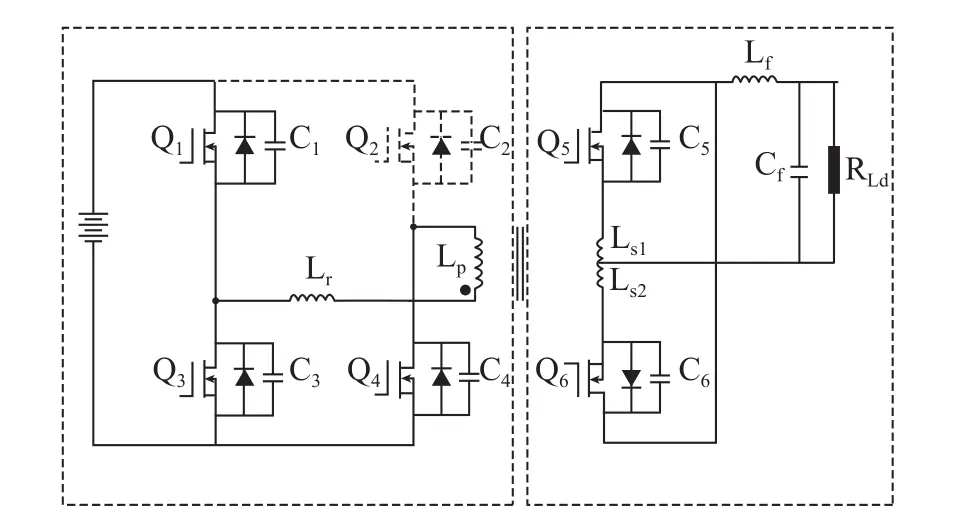
图1 峰值电流模式移相全桥变换器原理图Fig.1 Phase-shift full bridge converter based on peak current mode
1.1 移相全桥全波整流电路原理分析
在一个完整的运行周期中,移相全桥全波整流电路共有12种模态变换。由于前半周期的模态变化与后半周期的运行原理基本相同,因此只讨论半周期的模态变换情况。图2为移相全桥全波整流电路全周期内信号的主要波形图,图中:ip为原边电流;Vin为内部电压;Vrect为整流器电压;t为时间。
模态0(0~t0时刻):该时刻电路运行状态如图3(a)所示,MOS管Q1、Q4导通,原边电流ip流动方向为此时MOS管 Q5导通,副边电流 if流动方向为
模态1(t0~t1时刻):t0时刻后关断Q1,原边电流ip由Q1中转移到电容C1和C3中,其中电路对C1进行充电,C1其电压由0 V逐步上升,而电容C3随着放电逐步变小,此时Q1因零电压关断。
在 t1时刻,当 C3的电压下降到 0 V后,Q3的反向二极管D3导通,此时模态1的过程结束。这一模态变换过程中电路运行如图3(b)所示。
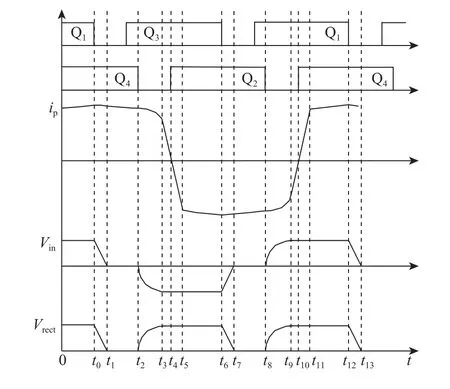
图2 移相全桥全波整流电路全周期内信号主波形示意图Fig.2 Main waveform of full wave rectifier circuit with phase-shift full-bridge in the full cycle
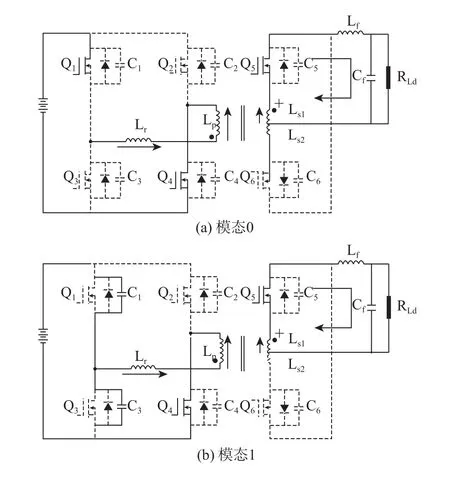
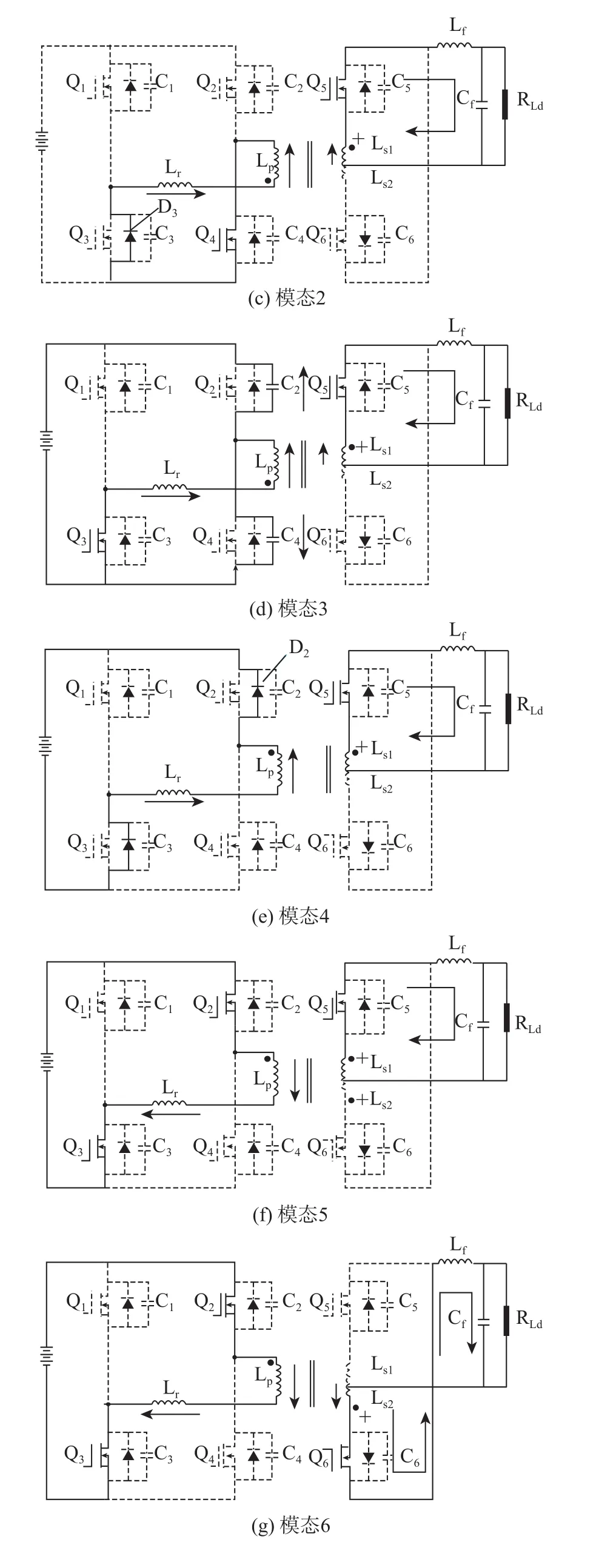
图3 各模态电路运行状态图Fig.3 Modes of the circuit run-state
模态 2(t1~t2时刻):如图 3(c)所示,此时MOS管Q3、Q4导通。但由于二极管D3作用,此时Q3是零电压开启,因此虽然Q3导通,但是电流仍然由D3传递,此时Q3没有电流经过。
模态3(t2~t3时刻):在t2时刻,Q4关断。此时原边电流ip由Q4转移到电容C2和C4,此时C2逐渐放电,C4处于充电过程。由于电容C4的作用,Q4在这一过程中处于零电压关断过程,如图 3(d)所示。
模态 4(t3~t4时刻):在 t3时刻,二极管D2导通,此时Q2是零电位,因此此时闭合Q2为零电压闭合。由于D2作用,此时Q2没有电流经过。ip经D2流通。达到t4时刻,原边电流从ip下降到零,D2和D3由于压降作用自然断开,Q2和Q3由于电源压降作用重新导通,原边电流ip经过,如图3(e)所示。
模态5(t4~t5时刻):在t4时刻,原边电流正向导通,但是此原边电流不足以提供副边负载电流,导致负载电流依然由两个整流二极管提供运行回路。直至t5时刻后,所有负载电流流过D6,模态5运行结束,如图3(f)所示。
模态 6(t5~t6时刻):如图 3(g)所示,此时Q2、Q3接通,为原边提供稳定电流,MOS管Q6的关闭为副边整个回路提供负载电流,并在t6时刻完成半周期的模态状态切换。变换器另一个半周期的变化可以依据以上模态变换进行分析,完成移相全桥全波整流的变换过程。其原边和副边的信号具体变化如图2所示。
1.2 峰值电流型 Buck 降压电路工作原理
图4为峰值电流控制型Buck降压电路示意图。工作过程中,变换器的输出电压v(t)同设定的参考电压Vref进行比较。该对比信号的误差经过放大处理,作为输出量控制峰值电流的控制指令vc(t)。将主回路采样电阻测得的电感电流转化的电压信号(iL× R),并与 vc(t)进行比较。最终和时钟频率共同作用,通过脉冲置位RS触发器,控制功率开关Q的通断,最终调节电感电流的变化。其电路运行中电感电流变化过程如图5所示,图中:U为电压表;u为最终的控制电压。
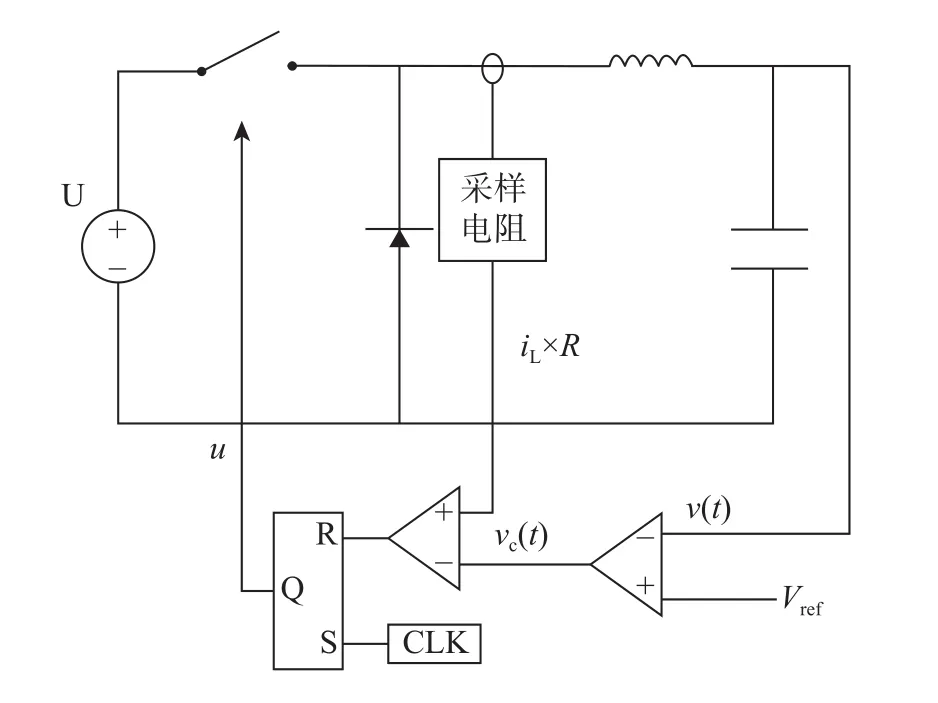
图4 峰值电流控制型 Buck 降压电路示意图Fig.4 Buck circuit based on peak current control
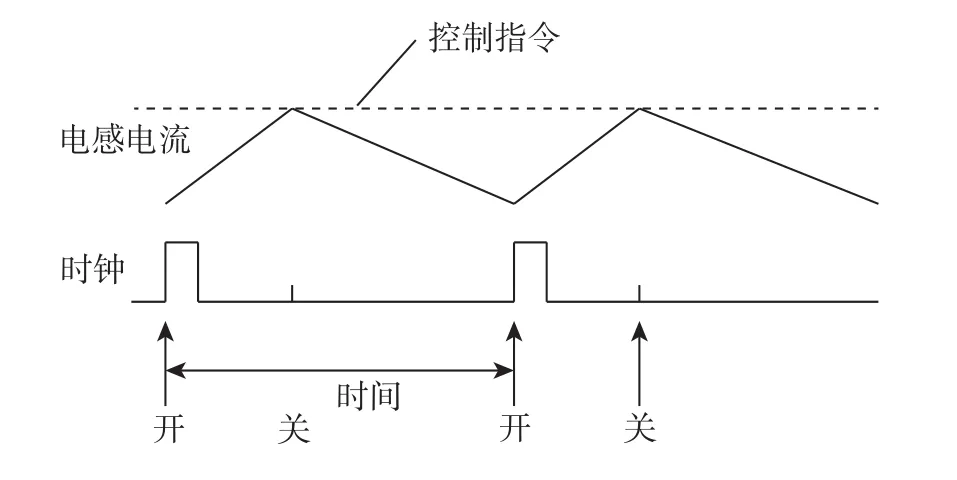
图5 Lf 电感电流变化示意图Fig.5 Changes of Lf inductor current
当iL× R大于电流控制信号时,比较器翻转,控制功率开关Q断开,电感L通过二极管的电流呈下降趋势,直至下一个时钟周期开始在此翻转调节。
2 基于串联双闭环控制算法分析及斜坡补偿网络设计
2.1 串联双闭环控制算法
根据前文所述的电路工作原理,本文设计了一套基于电压反馈外环主回路、电流反馈内环副回路的串级PID控制器。双闭环串级PID控制电路的结构如图6所示,图中Rsc为电阻。当控制系统输入参考电压Vref后,与副边采样得到的实时电压对比得到误差e1,将其作为外环电压环PID控制器的输入信号进行调节。控制输出信号则作为副回路电流环控制器的参考输入,与原边采样电阻得到的控制电流进行比较,得到内环的控制误差e2,再将其并输入PID控制器进行内环调节,最终达到输出和输入完全相等。
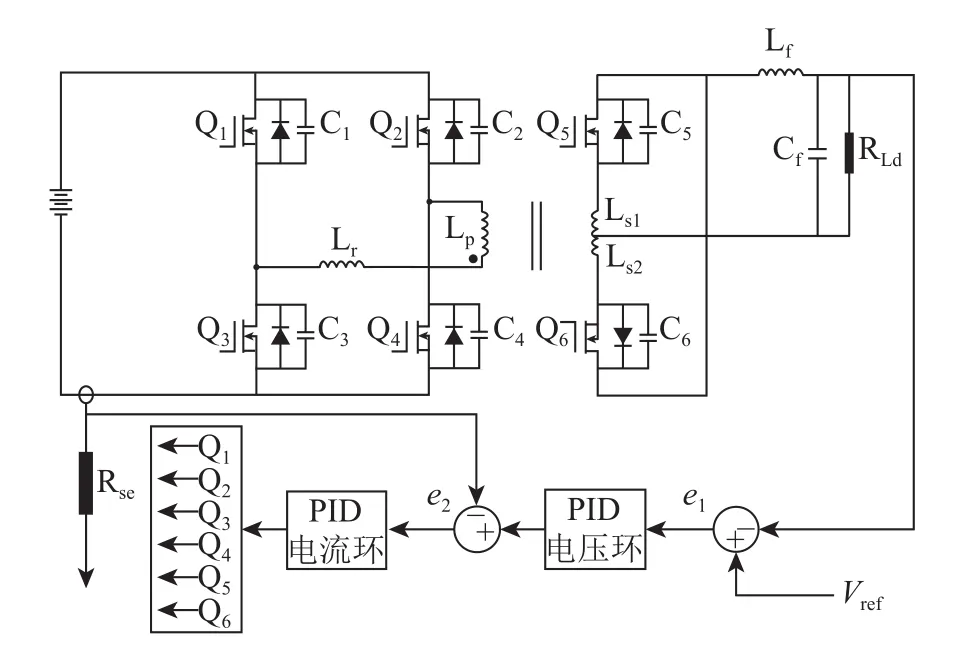
图6 双闭环串级 PID 控制电路Fig.6 Cascade PID control circuit with double closed-loop
2.2 斜坡补偿网络设计
由文献[14]可知,扰动状态下副边电感电流与控制输入信号占空比的关系为

当占空比小于0.5时,系统稳定;当占空比大于0.5时,系统随时间变化变得不稳定。电感电流不稳定情形如图7所示,图中:ic为控制电流;T为周期。因此,为了解决占空比大于0.5时电感电流不稳定的问题,需要为扰动系统加入斜坡补偿以使其达到稳定状态。
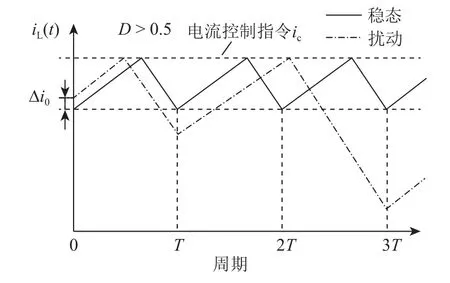
图7 电感电流不稳定情形Fig.7 Instability of inductor current
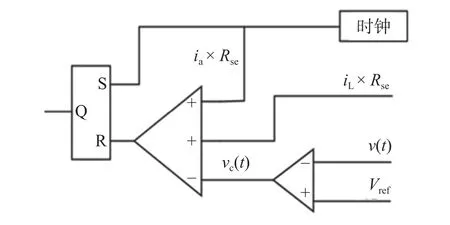
图8 带斜坡补偿的峰值电流控制电路Fig.8 Peak-current control circuit with slope compensation
设计如图8所示的具有斜坡补偿的峰值电流控制电路。斜坡补偿信号实质为一个频率等于变换器的开关频率的周期性锯齿波电流控制信号ia(t)。与图4相比,图8中加入了一个ia× Rse的斜坡补偿信号。引入该斜坡信号后,将电感电流信号iL和一个以初始值为ic、斜率为锯齿波下降斜率相同的修正信号进行比较,最终输出控制信号,使补偿后的电感电流趋于稳定。补偿后的扰动电流变化趋势如图9所示。
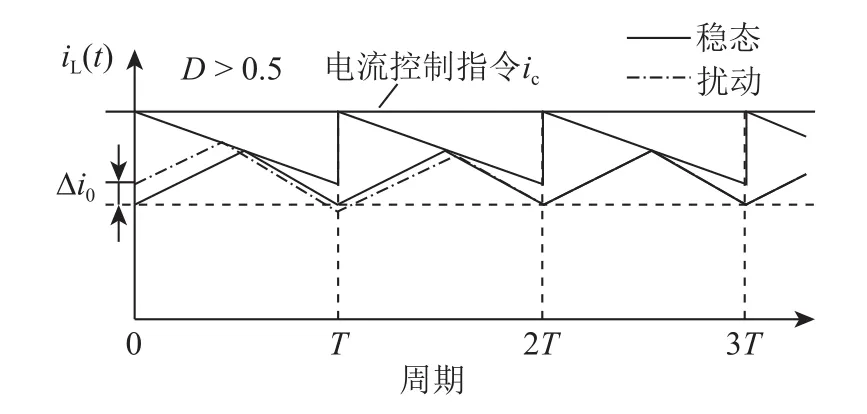
图9 斜坡补偿后稳定的电感电流波形Fig.9 Stable waveform of inductor current with slope compensation
3 实验验证
为了验证上述方法的可行性,以PIC16F887单片机为核心,开发了一套电动汽车充电控制单元实验样机,并通过实验测试验证基于峰值电流控制模式的移相全桥变换器方案的可行性。
该电动汽车充电单元结构示意图如图10所示。该单元由控制芯片、移相全桥全波整流变换器、系统供电单元以及其他电气辅件组成,能够实现漏电检测、过压欠压信号检测等功能。
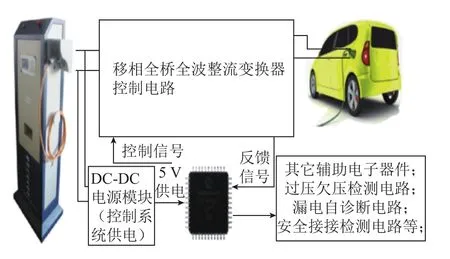
图10 电动汽车充电单元总体结构示意图Fig.10 Overall structure of the charging unit for electric vehicle
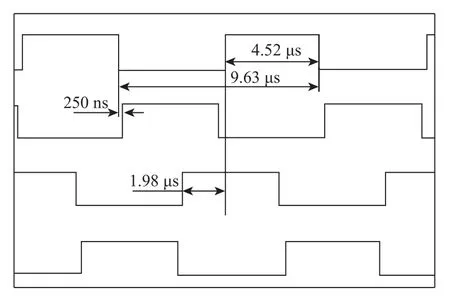
图11 主边 Q1–Q4 驱动信号波形Fig.11 Waveform of main-side driving signal Q1-Q4
图11为主边MOS管Q1至Q4的控制信号波形。由图中可以看出,MOS管驱动频率为103.8 kHz,死区时间为 250 ns,前后桥臂的移相时间为1.98 µs。该电路可以较好地实现全桥移相整流的功能。
4 结 论
(1)与传统的基于电压单闭环反馈控制开关变换器相比,峰值电流控制型开关变换器的多环反馈控制结构具有逐周限流保护的功能,可使系统获得更高的可靠性、更好的电压调整率。
(2)基于斜坡补偿的控制系统能够有效解决输入控制信号占空比大于50%时,副边电路电感电流不稳定的问题。这种补偿方法极大拓展了基于电流控制式移相全桥全波整流开关变换器的整流能力,使其在电动汽车充电单元中的应用得以实现。
(3)基于峰值电流模式的移相全桥变换器电动汽车充电单元具有充电过程电流稳定、充电速度快等优点。
猜你喜欢
通信电源技术(2018年5期)2018-08-23 01:16:12
通信电源技术(2018年3期)2018-06-26 08:05:42
电子测试(2018年4期)2018-05-09 07:27:53
电测与仪表(2016年4期)2016-04-11 09:48:06
通信电源技术(2016年5期)2016-03-22 01:09:41
铁道科学与工程学报(2015年4期)2015-12-24 12:11:25
电测与仪表(2015年23期)2015-04-15 00:31:22
电测与仪表(2015年16期)2015-04-12 00:44:38
电子设计工程(2015年3期)2015-02-27 12:03:53
电测与仪表(2014年7期)2014-04-04 12:09:32
