多场耦合下PLZT陶瓷光致电场效应及其应用*
2018-07-27 07:29:02黄家瀚王新杰
传感技术学报 2018年6期
黄家瀚,张 崇,王 骥,王新杰
(1.宁波大学机械工程与力学学院,浙江 宁波 315211;2.南京理工大学机械工程学院,南京 210094)
微光学技术、集成电路技术、微机械技术及集成工艺制作技术融合形成了多学科交叉的前沿研究领域——微光机电系统MOEMS(Micro-Optical-Electro-Mechanical-System),基于该系统易于微小型化、响应速度快和能耗低的特点,微光机电系统已被广泛应用于光通信、生物技术以及航空航天等方面。系统中的光学元件在微驱动装置驱动下对入射光束进行衍射、反射、光路通断以及相位调制等控制,从而使微光机电系统具有光学校正、衰减、扫描成像和光开关功能。微驱动装置是微光机电系统的核心部件,其性能优劣决定了微光机电系统的性能和应用场合,目前常用的驱动机制主要有压电驱动[1]、静电驱动[2]、电磁驱动[3]以及电热驱动[4]等驱动方式,它们的共同特点就是需要额外的电磁激发装置和导线连接,易受到电磁干扰,不易微小型化。相比之下,基于镧改性锆钛酸铅(PLZT)陶瓷的光驱动方式有很多独特的优点:①远程非接触式驱动,直接将光能转化为机械能,消除机械传动环节,结构简单;②无导线连接,可以实现无线能源传输,避免电磁干扰,这些优点使PLZT铁电陶瓷在微光机电系统中具有广阔的应用前景。铁电材料PLZT陶瓷在紫外光源照射下可产生非常高的光生电压,比晶体电子禁带宽度Eg高2个~4个数量级,被称为反常光生伏特(Anomalous Photovoltaic)效应。自从反常光生伏特效应被发现以来,众多学者对其机制、数学模型、影响因素以及应用做了广泛的研究。1983年,Brody等人利用RC充电电路模型模拟PLZT陶瓷电极间光生电场的变化规律,然而并没有指出反常光生伏特效应机理[5];2000年,Poosanaas等人指出光学二次非线性是反常光生伏特效应的原因,推导了光电流强度的表达式,并进行了实验研究[6];2005年,Tzou和Shih等人考虑了热效应和漏电压,推导了PLZT陶瓷的光致电场的表达式及其光致伸缩模型,并利用Fukuda等人[7]的实验数据对相关参数进行了数值拟合,然而并没有考虑热膨胀对光生电场的影响[8]。20世纪90年代,一大批学者对入射光光照强度和偏振方向[9]、PLZT组分[10]、晶粒取向[11]、表面粗糙度[12]和尺寸参数[13]等因素对PLZT铁电陶瓷光致电场效应的影响规律进行了细致研究,为基于PLZT铁电陶瓷的光电换能器件研究奠定了良好的基础,然而,PLZT陶瓷光致输出特性及相关实验现象并没有得到合理的解释。
PLZT陶瓷的反常光生伏特效应使其可作为光控非接触式电动势源,针对PLZT陶瓷光致电场效应,学者们进行了一系列的应用尝试。1993年,Fukuda等人利用PLZT陶瓷光致电场产生的静电力驱动微位移运动机构,提出了一种无线光驱动移动机器人[7];2007年,东南大学黄学良等人提出了PLZT陶瓷光致电场驱动的光电机[14],西北工业大学的唐波等人对光电马达进行了物理建模,并进行了有限元分析[15];2015年,哈尔滨工业大学的姜晶等人提出了光控压电混合驱动,并用于悬臂梁的独立模态控制[16],不仅如此,还提出了基于PLZT光致电场的月球探测器表面月尘清除装置[17]。
虽然PLZT陶瓷光致电场数学模型及其应用已经得到了一定程度的研究,但是现有数学模型还不能很好地解释光致电场的实验现象。本文首先对多场耦合下PLZT陶瓷光致电场耦合机制进行了分析,推导了多场耦合下光致电场的数学表达式,并对实验现象进行了理论解释;然后对单片和双片PLZT陶瓷的光生电压进行了动态控制实验研究,并提出了光生电压驱动的光控非接触式器件,对PLZT陶瓷作为非接触式电动势源在微光机电系统中应用的可行性进行了探讨。
1 多场耦合下PLZT陶瓷光致电场数学模型
1.1 光致电场耦合机制分析
PLZT陶瓷属于铁电材料的一种,同时具有压电效应、热释电效应以及反常光生伏特效应等特性。在高能紫外光束照射下,由于光热效应,PLZT陶瓷光照表面温度升高,从而激发热力场;同时,由于反常光生伏特效应,PLZT陶瓷产生光电耦合场;在热膨胀效应和压电效应共同作用下,形成力电耦合场。综上,光照下的PLZT铁电陶瓷内部形成了复杂的光-电-热-力多能场耦合场,PLZT铁电陶瓷垂直于极化方向两端电极间的综合光致电场是热释电电场、反常光生伏特电场、压电电场和热膨胀效应等综合作用的结果。
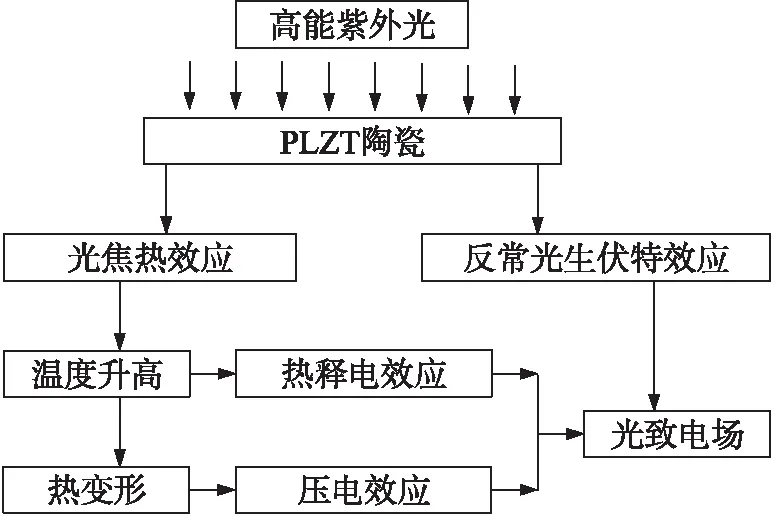
图1 高能紫外光下PLZT陶瓷光致电场能量转化过程图
PLZT陶瓷光致电场的形成经过了一系列的能量转化过程,图1所示的是PLZT铁电陶瓷内部能量转化的过程,从能量转化角度分析可以得到,光致形变和综合光致电场经过以下转换过程:
①光焦热效应(光能→热能转换):由于光焦热效应,入射光能一部分转化为热能,从而引起PLZT铁电陶瓷光照表面温度升高;
②反常光生伏特效应(光能→电能转换):在反常光生伏特效应作用下,一部分入射光能转化为电能,实现光能向电能的能量转化;
③热释电效应(热能→电能转换):由于热释电效应,由光焦热效应产生的热能一部分转化为电能,PLZT铁电陶瓷光照表面的温度在紫外光照射下显著升高,在其两端电极间会有热释电电场产生;
④热膨胀效应(热能→机械形变):在高能紫外光束照射下,由光焦热效应产生的热能一部分转化为机械形变能量;
⑤正压电效应(热变形→电能):在热膨胀作用下,PLZT陶瓷发生热致形变,基于正压电效应,使由温度引起的一部分热变形转化为电能;
从以上能量转化分析可知,当PLZT铁电陶瓷受到高能紫外光束照射时,在PLZT铁电陶瓷两端电极间产生的综合的光致电场是压电电场(基于正压电效应,使机械能向电能转换)、热释电电场(基于热释电效应,实现热能向电能转换)和反常光生伏特电场(基于反常光生伏特效应,实现光能向电能转换)相互叠加的结果。需要指出的是,在紫外光源照射下,由反常光生伏特效应激发的反常光生伏特电场和由热释电效应激发的热释电电场均与PLZT铁电陶瓷的极化方向相同,而PLZT铁电陶瓷光照表面温度升高会使PLZT铁电陶瓷产生热膨胀效应,其造成的热致形变所激发的压电电场与PLZT铁电陶瓷的极化方向相反,削弱了反常光生伏特电场和热释电电场的叠加电场。
1.2 光致电场数学模型
当PLZT铁电陶瓷的光照表面受到高能紫外光照射时,在垂直其极化方向的电极间会产生非常强的反常光生伏特电场。高能紫外光激励下的PLZT铁电陶瓷可以看作是电流源、电阻Rp和电容Cp组成的并联等效回路[18],基于PLZT铁电陶瓷的等效电学模型可以得到紫外光照射下的反常光生伏特电场表达式为:
(1)
式中:Es为饱和反常光生伏特电场,且Es=IpRp/De,其中Ip为光电流,De为PLZT陶瓷的电极间距;τ1为反常光生伏特时间常数,且τ1=RpCp。
由于光焦热效应,PLZT铁电陶瓷光照表面的温度在高能紫外光源照射下会明显升高,在热释电效应作用下,两端电极间会产生热释电电场。假设入射光的光强为I,结合热平衡原理可以得到PLZT铁电陶瓷温度变化量ΔT随时间变化的表达式:
(2)

根据热释电效应的定义,则热释电电流的表达式为:
(3)
在PLZT铁电陶瓷垂直于极化方向的两端均镀有铜电极,则PLZT铁电陶瓷可以被作为一个电容处理。当PLZT铁电陶瓷刚刚开始受到高能紫外光照射时,其初始热释电电场场强为0,即Eθ(0)=0。依据电容的电压电流关系可得到热释电电场的表达式:
(4)
PLZT铁电陶瓷表面温度升高会引起热变形,根据热弹性理论可得到热致形变的表达式:
(5)
式中:λ为PLZT铁电陶瓷的热应变系数;Ya为PLZT铁电陶瓷的杨氏模量。
在正压电效应作用下,PLZT铁电陶瓷表面温度升高引起的热致形变可在其两端电极间激发压电电场。基于压电效应可得到热膨胀引起的压电电场为:
(6)
式中:d3i为PLZT铁电陶瓷的压电常数,i为PLZT铁电陶瓷坐标系中光致应变的方向,i=1,2,3。
实际上,只有一部分热致形变转化为电场。通过反常光生伏特效应、热释电效应和正压电效应的作用机制分析可知,在PLZT铁电陶瓷内部,反常光生伏特电场和热释电电场的方向与PLZT铁电陶瓷的剩余极化方向相同,从而使PLZT铁电陶瓷内部综合电场得到增强。而热致形变在PLZT铁电陶瓷两端电极间激发的压电电场,其方向与反常光生伏特电场和热释电电场组成的电场方向相反,对PLZT铁电陶瓷内部的综合电场产生了削弱作用。
通过以上分析可以得到各个效应产生电场之间的相互作用,因此,在高能紫外光束照射下,PLZT铁电陶瓷内部产生的综合光致电场表达式为:
(7)
式中:β为热致形变与压电电场之间的能量转换系数。
1.3 光致电场实验变化曲线分析
通过PLZT陶瓷光致特性静态实验对不同光强照射下PLZT陶瓷电极间光生电压进行了测量,得到50 mW/cm2和200 mW/cm2光强下PLZT陶瓷光生电压变化实验曲线,如图2所示。
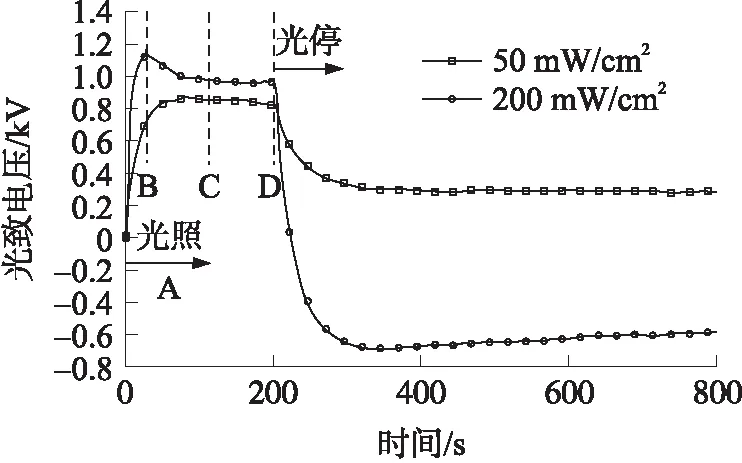
图2 50 mW/cm2和200 mW/cm2光强下PLZT铁电陶瓷光生电压变化曲线
从图2可知,在A点紫外光源开始照射,PLZT铁电陶瓷两端电极间的光生电压在50 mW/cm2光强的紫外光源照射下增大至饱和值,并在最大值处保持稳定状态,如CD段所示,由于50 mW/cm2光强下PLZT铁电陶瓷表面温度升高较小,可以忽略其引起的热释电效应和热致形变引起的压电电场,此时光致电场主要由反常光生伏特电场组成,即式(7)中第1项,所以实验曲线在达到饱和之后维持稳定状态;在D点出关闭光源,光生电压迅速下降并表现有明显的残余电压现象。
与之不同的是,在200 mW/cm2光强下PLZT铁电陶瓷光照表面温升较大,此时的热释电效应和热膨胀效应不可忽略,因此200 mW/cm2光强下的光生电压实验曲线变化规律也不同。从图2可以看到,在A点处开始照射之后,其光生电压迅速上升至最大值,如B点所示,然后下降至某一稳定状态,并在此保持稳定,如CD段所示,在AB段的综合光生电压主要由反常光生伏特电压和热释电电压组成,即表达式(7)第1项和第2项表达式,因此响应速度远远快于50 mW/cm2光强下的光生电压,然后在B点处由于热致形变引起的压电电压与综合电压方向相反,所以造成综合电压剧烈下降,在CD段达到热平衡,热致变形达到稳定状态,因此此时综合电场达到稳定状态;在D点处关闭紫外光源,光生电压迅速下降并产生反向电压,这是由于光停之后,PLZT铁电陶瓷表面温度大幅下降,由于热释电效应,在其两端电极间产生与光生电压方向相反的热释电电压。
从以上分析可知,所构建的光致电场数学模型可以在理论上对光致电压实验曲线进行定性解释和分析,且光焦热效应引起的PLZT铁电陶瓷表面温度升高对其光致电场和形变效应有较大的影响,在进行光致电场和光致伸缩数学模型构建时不可忽略光致温升带来的影响。
2 光致电压动态控制实验研究
2.1 单片PLZT铁电陶瓷光生电压ON-OFF闭环控制实验
2.1.1 光生电压ON-OFF闭环控制实验流程
使用定光强控制对单片PLZT铁电陶瓷的光生电压进行控制,通过控制光快门的开启和关闭来控制入射光的通断,从而实现光源ON-OFF照射,光生电压ON-OFF控制实验框图如图3所示,光生电压的控制目标值在实验开始之前设定,电压数据信号通过高阻抗电压表进行采集,然后利用微处理器对数据进行处理,根据处理结果向光快门控制电路发出控制信号。首先将光快门初始状态置于开启状态,当PLZT铁电陶瓷两端电压在紫外光源照射下达到目标值时,通过数据处理并发送信号驱动光快门变为关闭状态,此时相当于光停,当PLZT陶瓷两端电压下降至低于目标值时,通过控制器发送信号使光快门打开,进行ON控制,使紫外光源照射PLZT铁电陶瓷,如此循环往复,从而实现光生电压的动态闭环控制。
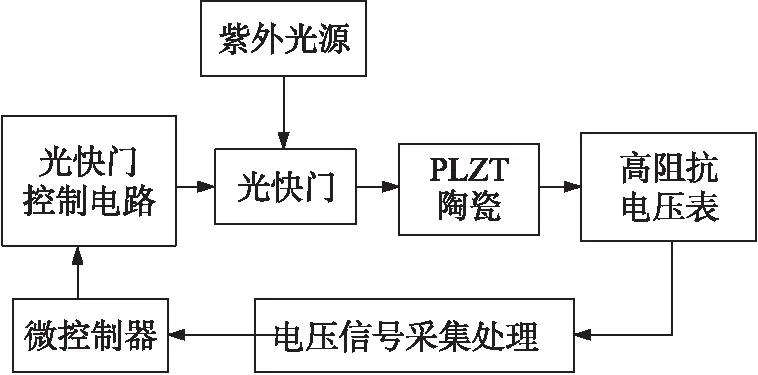
图3 单片PLZT铁电陶瓷光生电压ON-OFF闭环控制实验框图
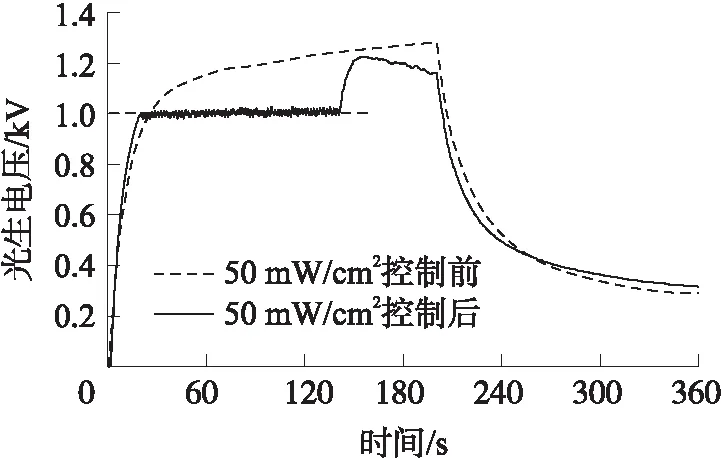
图4 50 mW/cm2光强下控制前后的光生电压曲线对比图
2.1.2 实验结果讨论
为了对单片PLZT铁电陶瓷光生电压在ON-OFF闭环控制策略下的控制效果进行研究,对50 mW/cm2光强下的光生电压进行控制,并将控制前后的光生电压曲线进行对比,控制前后的实验结果曲线如图4 所示。首先进行光致电场响应测试实验,测量50 mW/cm2光强下PLZT铁电陶瓷两端电极间的光生电压数据;然后,设置控制目标电压值为1 000 V,对相同光照强度下的PLZT铁电陶瓷光生电压实施ON-OFF变换控制,并对其数据进行采集记录。将以上两组光生电压实验数据在同一坐标系里绘图,得到控制前后光生电压变化曲线图。从图中可以看出,单片PLZT铁电陶瓷的光生电压在ON-OFF闭环控制策略下可以使光生电压保持在目标值1 000 V,并取得较好的控制效果,从而证明了利用光快门的通断对单片PLZT铁电陶瓷的光生电压实施ON-OFF动态闭环控制的可行性。
在单片PLZT铁电陶瓷光生电压ON-OFF闭环控制试验中,对不同光强和不同光生电压控制目标值对控制精度的影响进行研究。分别利用50 mW/cm2和100 mW/cm2光强对单片PLZT铁电陶瓷进行照射,通过光快门对入射光通断进行控制,然后对不同光强下的控制目标值进行设定。
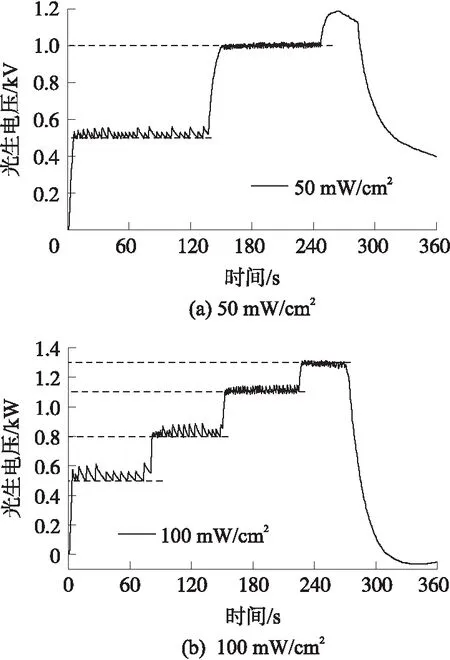
图5 不同光强下单片PLZT陶瓷光生电压的多目标控制曲线图
如图5(a)所示,在50 mW/cm2光强下设置控制目标值分别为500 V和1000 V,从图5可以看出,光生电压可迅速达到设定的控制目标电压值500 V,并在ON-OFF闭环控制下在500 V保持稳定状态,然后修改控制目标值为1 000 V,此时光快门开启,光生电压迅速达到1 000 V,并保持稳定状态。光生电压控制目标值为500 V时的控制精度要优于1 000 V时的控制精度,这是因为控制电压为1 000 V时,光生电压离饱和值较近,此时光生电压响应速度小于目标电压为500 V时的响应速度。
从图5(b)中可以看出,在100 mW/cm2光强下设置控制目标电压值分别为500 V、800 V、1 100 V和1 300 V,随着光生电压控制目标值越来越大,光生电压的控制精度越来越不稳定,这是由于控制目标电压值越小,光生电压响应速度越快,对于光快门的响应速度要求越高。
将图5(a)和图5(b)中控制电压目标值为500 V的曲线相比较,50 mW/cm2光强下的动态控制精度远远好于100 mW/cm2光强下光强下的控制精度,这是因为入射光源的光照强度越大,光生电压的响应速度也越大,光快门的响应速度与高阻抗电压表的采样频率不能满足光生电压响应速度控制要求。从以上分析可以得知,单片PLZT铁电陶瓷在定光强 ON-OFF 闭环控制下可以对光生电压进行有效控制,并具有较好的控制精度。
2.2 双PLZT铁电陶瓷光生电压双光源控制实验
利用ON-OFF闭环控制策略对单片PLZT铁电陶瓷进行控制,能够实现光生电压多目标值控制,并取得较好的控制精度,但是由于PLZT铁电陶瓷具有明显的残余电压,不同目标电压值之间调节时间较长,且不能产生反向电压输出,这对于PLZT铁电陶瓷作为光控电动势源显然是不够的,因此,通过对双片PLZT铁电陶瓷双光源交替激励控制实现光生电压的双向调控对于PLZT铁电陶瓷作为换能器供能装置具有重要意义。

1.紫外光源UV-1探头;2.光快门;3.紫外光源UV-2探头;4.紫外光源UV-1控制器;5.高阻抗电压表;6.PLZT_1陶瓷;7.高阻抗电压表探头;8.光快门控制电路;9.PLZT_2陶瓷;10.计算机;11.紫外光源UV-2控制器图6 双片PLZT铁电陶瓷的光生电压双光源控制实验平台
2.2.1 实验流程及实验平台搭建
图6所示的是双PLZT陶瓷光生电压的双光源协调激励控制实验平台,利用导电银胶和导电银线将两片PLZT铁电陶瓷(PLZT_1和PLZT_2)的两端电极按极化方向相反进行连接,形成公共电极,公共电极两端与高阻抗电压表连接,进行电压数据采集;两台紫外光源探头分别对准PLZT_1铁电陶瓷和PLZT_2铁电陶瓷,探头与陶瓷之间均设有光快门装置,用于控制光路通断;利用C8051F410微控制器对所测的电压信号进行处理,并向两光快门发送控制信号,控制紫外光源照射的通断。
将PLZT_1铁电陶瓷和PLZT_2铁电陶瓷两端电极连接在一起,使其极化方向相反,利用紫外光源照射PLZT_1铁电陶瓷可以消除PLZT_2铁电陶瓷的残余电压[19],从而改变公共电极间的光生电压,因此可以通过双光源协调激励控制策略实现光生电压的双向快速控制。根据高阻抗电压表测得的光生电压值,利用Labview软件对两光快门进行控制,实现双光源协调激励控制。控制流程如下:实验开始之前,首先启动高阻抗电压表和运行Labview软件,设置控制目标电压值,将第一光快门置于“ON”状态,第二光快门置于“OFF”状态;将两紫外光源同时开启,此时PLZT_1铁电陶瓷受到紫外光源照射,在公共电极间产生光生电压,光生电压数据被反馈至微控制器,与控制目标电压值进行比较处理,然后根据处理结果发出控制信号;如果公共电极间电压达到所设定的控制目标值,通过光快门控制电路关闭第一光快门,同时打开第二光快门,此时PLZT_2 铁电陶瓷受到紫外光源照射,从而改变公共电极间光生电压值,如此循环往复,从而实现光生电压的双向动态控制;可通过设置新的目标电压值实现不同光生电压的控制目标。

图7 两片PLZT陶瓷光生电压的双光源控制曲线
2.2.2 实验结果分析
通过双光源协调激励控制双片PLZT铁电陶瓷公共电极间的光生电压实验,得到光生电压的动态控制实验曲线,如图7所示。在实验中,两台紫外光源的光照强度设置并不相同,其中紫外光源UV-1的光照强度为300 mW/cm2,而紫外光源UV-2的光照强度为100 mW/cm2,为验证双光源激励法可以实现公共电极间电压的双向多目标控制,在实验中将控制电压目标值设为500 V、1 000 V、-500 V和300 V。
从图7中可以看出,控制电压从500 V目标值向1 000 V的目标值变化时间为2.7 s,远远小于单片PLZT铁电陶瓷ON-OFF控制的响应时间。然而,由于光快门的响应速度较低,且高阻抗电压表的采样频率较低,使得双光源协调激励的动态控制精度较差。在下一步深入研究中拟改进控制算法、提高高阻抗电压表的采样频率和使用响应速度更快的光快门,提高光生电压的响应速度,从而提高双光源协调交替激励的动态控制精度。从以上分析可知,双光源协调激励控制策略可以有效实现光生电压的双向调控,为PLZT铁电陶瓷在微机电系统中供能装置的应用提供依据。
3 潜在应用
由于光致伸缩效应,PLZT陶瓷在紫外光照射下会发生形变,将光能直接转化为机械能,没有中间机械传动环节,可以实现远程非接触式控制,因此在微光机电系统和微驱动领域具有很好的应用前景。然而,也存在一些问题阻碍了PLZT陶瓷光致伸缩效应在微驱动领域的应用:①PLZT陶瓷光致形变响应速度缓慢(秒级),且光致形变响应速度远远慢于光致电场的响应速度[20];②PLZT陶瓷只能单向致动;③PLZT陶瓷存在明显的残余应变,且残余应变恢复时间较长,这些问题严重限制了PLZT陶瓷在驱动领域的应用,特别是在高频驱动场合的应用。
相比之下,高能紫外光束照射下PLZT陶瓷两端电极间可快速产生高达103V/cm~105V/cm的光生电压,响应速度快(毫秒级),并且可以通过光源照射调节光生电压的大小和方向,因此,PLZT陶瓷可以作为电致伸缩材料以及静电驱动器的供能装置,从而避免直流电源等高压发生设备,减弱电磁干扰,符合轻质微小型化趋势。PLZT陶瓷是一种光控非接触式电动势源,基于PLZT陶瓷光生电场提出一些远程非接触式控制的概念性器件,这一类器件可不受供能装置尺寸限制和连接导线的限制,通过调节入射光进行精确控制。

图8 光电-静电复合驱动扭转微镜示意图
基于PLZT铁电陶瓷的光生电压驱动,提出了一种光电-静电复合驱动的扭转微镜装置,具体装置如图8所示。两片PLZT铁电陶瓷按极化方向相反方向布置,形成双晶片结构,两端公共电极与静电扭转微镜的驱动电极和镜面电极相连接,连接方式如图所示;微镜镜面通过立柱和对称扭转梁进行支撑,微镜镜面背部对称设有镜面电极,在基底上部设有相对应的驱动电极,镜面电极与基底驱动电极间形成电极板式静电驱动机构;扭转梁受到静电力作用发生扭转变形,从而实现微镜的扭转控制,在双光源交替激励控制下,PLZT双晶片公共电极间电压可以实现双向控制,对微镜的静电力进行控制,从而通过光源激励控制调节微镜旋转角度和方向,实现对光束的光控调节。
微泵是微流控系统中重要的执行部件,是微流控系统的核心,被广泛应用于药物微量输送和配给、生物化学分析、芯片系统冷却以及微小卫星的推进等领域。目前应用较多的是容积式微泵,通过泵膜的周期性往复运动引起泵腔容积的周期性变化,从而实现液体的泵送。泵膜的驱动方式决定了微泵的性能和应用场合,目前主要有电磁驱动、形状记忆合金驱动、热驱动、压电驱动、电液动力驱动和静电驱动等方式,但均需要额外的电磁发生装置,无法避免电磁干扰,且不易微小型化。基于PLZT陶瓷光生电压驱动的微泵装置可以通过控制入射光源的光照强度、交替照射频率对微泵的输出流量进行控制,具有远程非接触式控制、无污染、无电磁干扰等优点。
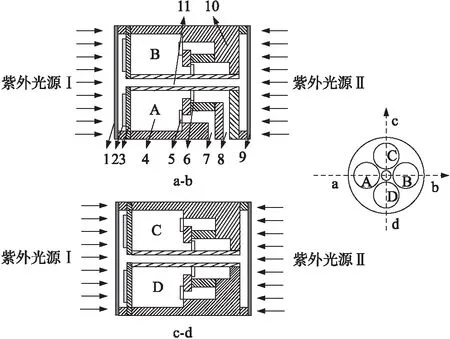
1.PLZT_1陶瓷;2.电致伸缩薄膜;3.泵膜;4.泵腔;5.入水阀;6.出水阀;7.入水口;8.出水口;9.PLZT_2陶瓷;10.泵体;11.导线孔图9 PLZT陶瓷-介电弹性体薄膜复合驱动的光控微泵装置
图9所示的是PLZT陶瓷-介电弹性体薄膜复合驱动的光控微泵,两片圆形的0-3极化PLZT_1陶瓷和PLZT_2陶瓷分别安装在微泵两端,呈极化方向反向布置,两端电极通过导电银线通过导线孔连接形成公共电极,并分别与A腔、B腔、C腔和D腔的介电弹性模连接,其中A腔、B腔的正负电极连接方式与C腔、D腔相反;介电弹性薄膜粘贴在高分子泵膜上,并与泵体形成泵腔,泵腔另一端设有入水阀和出水阀,A腔、B腔、C腔和D腔的出水口与出水口相连通,入水口与入水口相连通,即组成并联泵腔;当紫外光源Ⅰ照射PLZT_1陶瓷时,光生电压驱动A腔、B腔的介电弹性薄膜带动泵膜向外突出,泵腔容积增大,液体经入水阀流进容腔内,而C腔、D腔的介电弹性薄膜在光生电压作用下使泵膜向内凹陷,泵腔容积减小,液体经出水阀排出容腔,当紫外光源Ⅰ停止照射,紫外光源Ⅱ开始照射PLZT_2陶瓷时,公共电极间电压反向,引起A腔、B腔的容积减小,液体体积排出容腔,而C腔、D腔的容积增大,液体进入容腔。如此利用紫外光源进行交替周期性照射,从而实现连续泵水,微泵单位时间流量可以通过光照强度和光源交替照射频率调节进行控制。
4 结论
本文对多场耦合下PLZT铁电陶瓷光致电场效应及其控制进行了研究,并提出了一些潜在应用器件。首先,对多场耦合下PLZT陶瓷的光致电场数学模型进行了推导,该数学模型能够对实验现象进行合理的理论解释;其次,针对单片PLZT陶瓷的光生电压控制提出了ON-OFF闭环控制策略,并进行了实验验证,实验结果表明ON-OFF闭环控制策略可以实现多目标光生电压值较高精度的控制,针对双片PLZT铁电陶瓷的光生电压控制提出了双光源交替激励控制策略,利用双光源协调激励两片PLZT铁电陶瓷能够快速控制公共电极间的光生电压,证明了PLZT陶瓷作为光电转换器件的可能性;在此基础上,提出了光电-静电复合驱动扭转微镜和基于PLZT陶瓷光生电压驱动的光控微泵等潜在应用器件。
参考文献:
[1] Baran U,Brown D,Holmstrom S,et al. Resonant PZT MEMS Scanner for High-Resolution Displays[J]. Journal of Microelectromechanical Systems,2012,21(6):1303-1310.
[2] 姚峰林,高世桥. 微陀螺梳齿静电驱动力的计算方法[J]. 传感技术学报,2011,24(9):1265-1269.
[3] Cho I J,Yoon E. A Low-Voltage Three-Axis Electromagnetically Actuated Micromirror for Fine Alignment Among Optical Devices[J]. Journal of Micromechanics and Microengineering,2009,19(8):442-447.
[4] 刘骏文,徐大诚,陈巧,等. 电热驱动Bimorph微执行器对流系数估算方法研究[J]. 传感技术学报,2015,28(8):1120-1124.
[5] Brody P S. Optomechanical Bimorph Actuator[J]. Ferroelectrics,1983,50(1):27-32.
[6] Poosanaas P,Tonooka K,Uchino K. Photostrictive Actuators[J]. Mechatronics,2000,10(4):467-487.
[7] Fukuda T,Hattori S,Arai F,et al. Characteristics of Optical Actuator-Servomechanisms Using Bimorph Optical Piezo-Electric Actuator[C]//Proceedings of 1993 IEEE International Conference on Robotics and Automation,1993:618-623.
[8] Shih H R,Tzou H S,Saypuri M. Structural Vibration Control Using Spatially Configured Opto-Electromechanical Actuators[J]. Journal of Sound and Vibration,2005,284(1):361-378.
[9] Chu S Y,Ye Z,Uchino K. Photovoltaic Effect for the Linearly Polarized Light in(Pb,La)(Zr,Ti)O3Ceramics[J]. Smart Materials and Structures,1994,3(2):114.
[10] Matsukuma A,Nakada T,Morikawa Y. Study on Optical Servo System(Temperature Dependency of Photovoltaic Effect in PLZT Element)[J]. The Japan Society of Mechanical Engineers,1998,64(619):297-302.
[11] Ichiki M,Furue H,Kobayashi T,et al. Photovoltaic Properties of(Pb,La)(Zr,Ti)O3Films with Different Crystallographic Orientations[J]. Applied Physics Letters,2005,87(22):222903.
[12] Poosanaas P,Dogan A,Thakoor S,et al. Dependence of Photostriction on Sample Thickness and Surface Roughness for PLZT Ceramics[C]//IEEE Ultrasonics Symposium,1997,1:553-556.
[13] 王新杰. PLZT光致伸缩特性及光电层合回转薄壳主动控制的研究[D]. 哈尔滨:哈尔滨工业大学,2011.
[14] 黄学良,叶飞. 基于新型光电材料PLZT的光电机研究[J]. 光电工程,2007,34(12):138-144.
[15] 唐波. 锆钛酸镧铅陶瓷制备及其应用研究[D]. 西安:西北工业大学,2006.
[16] 姜晶,邓宗全,岳洪浩,等. 基于光控压电混合驱动悬臂梁独立模态控制[J]. 振动与冲击,2015(7):64-70.
[17] 姜晶,候绪研,王雷,等. 月球探测器表面月尘光电清除系统,CN105642615A[P]. 2016.
[18] Fridkin V M,Photoferroelectrics[M]. New York:Springer,1979.
[19] Wang X J,Huang J H,Wang J. Experimental Research on the Response Characteristic of PLZT Ceramics[J]. Smart Materials and Structures,2015,24(7):075017.
[20] Huang J H,Wang X J,Cheng W X,et al. Experimental Investigation on the Hysteresis Phenomenon and the Photostrictive Effect of PLZT with Coupled Multi-Physics Fields[J]. Smart Materials and Structures,2015,24(4):045002.
猜你喜欢
无机材料学报(2022年6期)2022-08-25 12:26:28
——潘桂棠光生的地质情怀
沉积与特提斯地质(2021年2期)2021-07-20 06:33:26
科学(2020年4期)2020-11-26 08:27:12
苏州科技大学学报(自然科学版)(2017年1期)2017-03-20 15:25:18
物理化学学报(2017年3期)2017-03-11 00:25:30
湖北工业大学学报(2016年5期)2016-02-27 13:15:01
昭通学院学报(2016年5期)2016-02-24 10:51:12
石家庄铁道大学学报(自然科学版)(2015年3期)2015-02-28 15:05:43
时代英语·高三(2014年5期)2014-08-26 20:14:10
小品文选刊(2013年6期)2013-04-29 00:44:03