基于工程训练的惯性避障小车设计*
2018-07-27 06:15,,,,,
现代机械 2018年3期
,,, ,,
(广东海洋大学 机械与动力工程学院,广东 湛江 524088)
0 引言
本课题是基于2017年广东省工科大学生实验综合技能竞赛[1]而提出的,主题为“惯性避障小车的设计与制作”。即设计制作出一款惯性避障小车,能在规定的斜坡以自身势能释放获得总动力,使其自身能行驶尽可能长的距离,同时能根据所设计的电路识别并避开路上所设计的障碍。与其他同类型小车相比,该车在结构上的设计更注重能量的转换和利用率,在电路与程序上的设计更注重识障越障的灵敏度。
1 惯性避障小车总体设计方案
1.1 小车设计要求
1)小车总质量不超过1000 g且主体为三轮结构。
2)小车动能从其在斜坡上的重力势能转换获得。
3)电控装置的主电路采用带单片机。电路板、检测元器件、舵机及驱动电路自行选定。电控装置所用电池自备,比赛时须安装到车上并随车行走,只能用于转向避障。
4)竞赛赛道为宽度2 m,长约40 m的长形赛道(图1),赛道边缘设有高度为80 mm的挡板。赛道上距离出发线10 m处放置第一个障碍,其后间隔不等交错设置多个障碍墙。出发时斜坡的斜度10°~20°,斜坡水平投影长度约900 mm。

图1 场地示意图
1.2 小车方案分析
为使小车能自主避障且滑行的距离更长,小车总体须拥有以下特点:
1)能识别前方挡板并自主避开。
2)自身的重力势能要高。
3)所受的阻力尽可能小。
为此,小车的轮子分布为“一前二后、前小后大”,车体为两块较轻的侧板,而设计的电控装置固定在车体上方靠后。
2 惯性避障小车设计思路
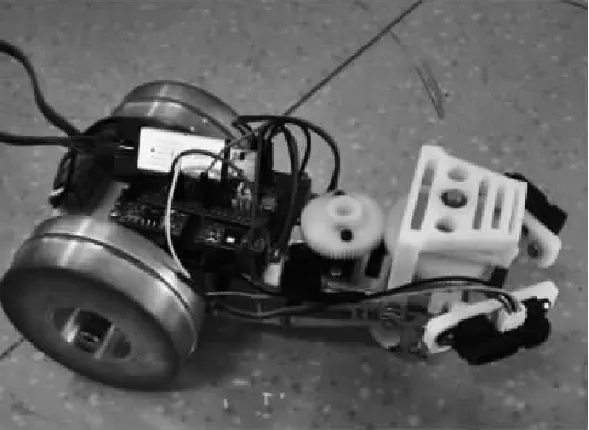
图2 惯性避障小车实物图
基于分析总结,小车重心位置要恰当、滑行过程要平稳、能量损耗要低;电控元件的选择要合适、编写的程序运行要稳定。惯性避障小车实物,如图2所示。为使小车在斜坡与地面交接处不前翻,且在转弯过程平稳,其后轮和前轮间的中心距通过软件运动学仿真与多次实车调试分析,设为12.6 mm较宜。总车能耗分内能耗和外能耗两方面:内能耗主要由零件加工、装配不当造成; 而外能耗主要是滚动摩擦造成。为此需保证零部件加工精度及装配精度,减少后车轮与地板的接触面积。最后,为使小车能敏锐地识障避障,电控装置采用STM32单片机控板、红外测距传感器及小型舵机。
3 惯性避障小车关键部件设计
3.1 后轮结构设计
基于竞赛命题要求,小车动能通过自身重力势能转化获得,而小车在斜坡释放高度一定。若要获得较大势能,则将小车大部分质量集中在后车轮以抬高该车质心。同时,车轮的转动惯量与小车行走距离成正比,即增大车轮的转动惯量可获得较大的行走距离。车轮的转动惯量计算[2]过程:不妨设后轮缘的重量为mg、外圆半径为R0、内圆半径为R1、平均半径为R,由于轮辐及轮毂直径转动惯量相对于轮缘较小,故可忽略不计。则后轮的转动惯量约为:

图3 后轮结构
同时,考虑到实际加工误差及材料缺陷导致左右后车轮质量不等,使小车质心偏离对称线,导致其滑行过程中会偏向质量较轻一侧。因此,将后轮质量集中在轮缘上,并在轮辐和轮毂之间增加相应配重块,如图3所示。最后,为减少滚动摩阻,便于转向,将车轮与地板设计成线接触形式。
3.2 侧板设计
考虑到风阻影响,在保证小车质心位置最高及结构强度的前提下,车身结构采用镂空处理的铝合金侧板,将其整体设计成流线型[3],以减小风阻。而两侧板通过双通尼龙柱固定连接,以保证小车整体强度,如图4所示。
3.3 前轮结构设计
根据竞赛要求,需回收小车前轮及前车轴。将其设计成易拆装安装结构。经分析得知,最佳方案是将前车架设计为叉架式,并通过螺栓预紧力将前车轴夹紧。而前轮与地板设计成线型接触,减少摩擦,方便转向。前轮结构见图5。

图4 侧板形状 图5 前轮结构
3.4 电控设计
3.4.1 系统总体设计
惯性壁障小车系统的功能框图如图6所示。
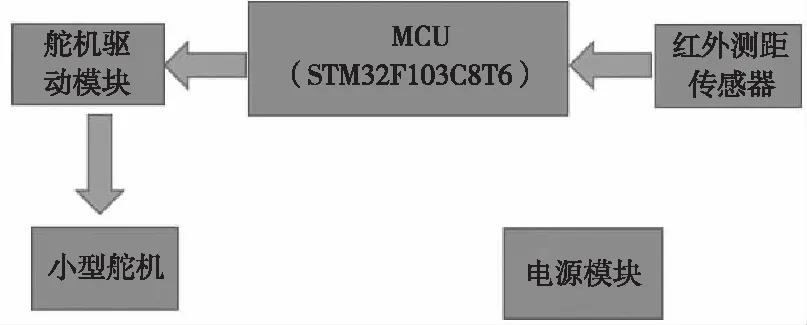
图6 系统功能框图
该系统主要由电源模块、核心控制板、舵机驱动模块和舵机组成。电源模块由7.4 V锂电池供电,利用稳压模块将电压降至5 V供给红外测距传感器和核心控制板使用,同时电源模块也给舵机驱动模块通电。红外测距模块[4]使用夏普的GP2Y0A21YK0F,检测范围为0~800 mm。舵机采用MG90S,其性价比高、扭矩大、反应灵敏。核心控制板采用具有32位处理器的STM32F103C8T6芯片[5],该芯片内部含有2个独立的ADC转换通道[6],能直接采集红外测距传感器数据,极大地简化了电路的设计。
3.4.2 电路设计
根据竞赛的要求,需要在现场进行焊接电路板,所以在满足竞赛要求的前提下,尽可能地使用模块,让电路焊接更加容易。
为适应车身大小,舵机驱动模块选用5 V的稳压模块。同时,舵机驱动模块和传感器的供电由电源模块并联提供,能极大减少舵机回流对传感器电压的影响,提高传感器的稳定性。电路原理图如图7所示(P9为电源排针,P10为开关,P1和P4分别为稳压模块的输出端,P2和P3分别是稳压模块的输入端,P6和P7分别为红外传感器的正负极,P5和P8分别为舵机的正负极)。
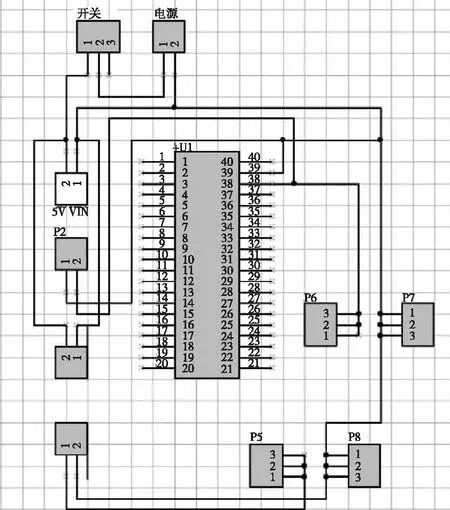
图7 电路原理图
3.4.3 避障的实现
避障的关键在于红外测距传感器所测数据的准确性以及数据处理的速度。红外测距传感器的输出信号为电压信号,导致控制芯片收集的数据出现较多噪声和干扰。为减少该缺点,在程序里用二分法[7]查表计算距离以及中位置平均滑动滤波[8],但过多的滤波次数会拖慢控制芯片的处理速度。因此滤波次数需能够调整,使得控制芯片的计算能力与小车速度相适配,这既能提高数据的准确性又能顾及数据的处理速度。惯性避障小车的程序流程图如图8所示(图中数值单位为cm,舵机转动的角度要根据赛道的实际情况进行调整以适应现场比赛场地的地面情况)。
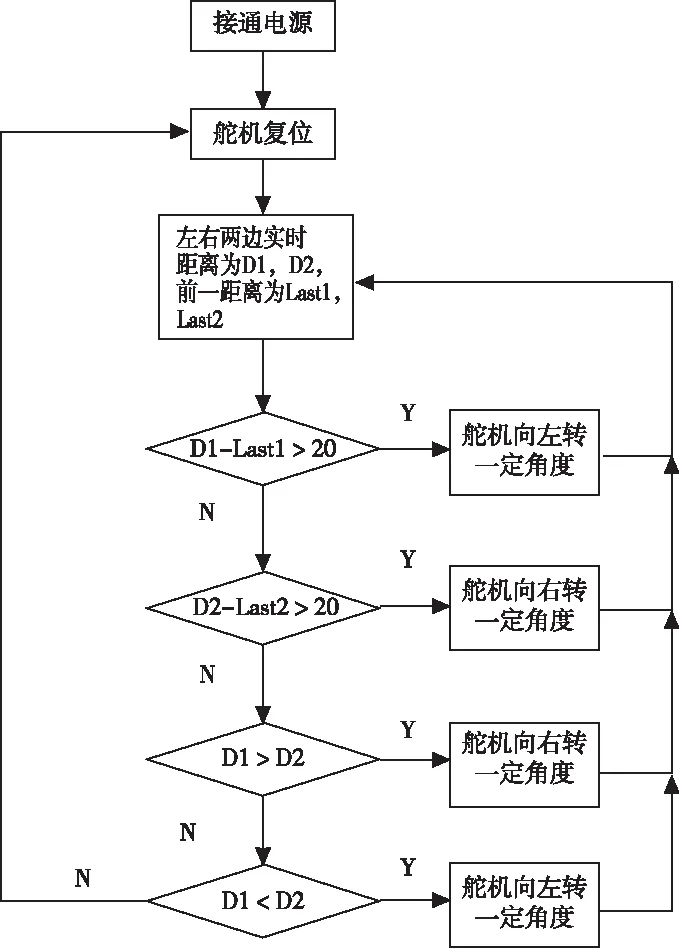
图8 程序流程图
4 讨论
该小车动力源由自身重力势能转化而得,根据机械原理、机械设计及单片机的基本知识,对该车的关键部件、结构及电路进行了分析、设计及计算,并结合SolidWorks motion仿真及后期实测,该惯性避障小车,主体结构简单,滑行距离长且平稳,低能耗。其电路设计及制作合理、程序执行稳定、识障避障灵敏度高,符合大赛要求。
基金项目:广东海洋大学“创新强校工程”2013年省奖补资金支持建设项目——基于校企协同的工程训练育人平台建设(GDOU2013010306);广东海洋大学“创新强校工程”2016年省财政专项资金支持项目——金工实习教学团队GDOU2016041003。
猜你喜欢
小学生学习指导·爆笑校园(2019年6期)2019-09-10
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
红蜻蜓·低年级(2015年11期)2016-02-02
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
舰船科学技术(2015年8期)2015-02-27
中国自行车·骑行风尚(2014年4期)2014-10-10