
基于人员位置的室内智慧照明系统设计
2018-07-27 05:15:44,,,,,
计算机测量与控制 2018年7期
, ,, , ,
(1.苏州科技大学 江苏省建筑智慧节能重点实验室,江苏 苏州 215009; 2.同济大学 电子与信息工程学院,上海 201804; 3.中国科学院 上海微系统与信息技术研究所,上海 200050)
0 引言
随着社会、经济的发展以及城市化进程的快速推进,使得现代人类滞留室内时间的呈现快速增加的趋势,其结果是我国电力需求迅速增长[1]。据统计,截至2016年,我国照明用电量较历史数据大幅增加,达到全社会用电量的14%[2]。建筑节能方法多样,诸如通过保温材料的应用、结构设计等,但是这些方法都需要对现有建筑的使用产生一定影响,且对内部滞留人员存在健康的潜在威胁。如何在不影响建筑结构和室内人员舒适度前提下,提高照明能效已经成为当前的研究的热点和难点,其中通过电气设备的智能控制实现节能被认为是绿色节能的重要手段和方法之一。
当前,建筑照明的控制系统主要通过声控、红外线或触摸等方式节能。相关研究、实验结果均表明,这些系统存在时效性低、节能效果不佳、误判率高和控制方式复杂度高等诸多可优化之处。针对上述问题,本文设计了一种基于蓝牙[3-5]的人员位置的室内智慧照明系统,实现室内人员的实时定位,动态计算照明系统开关时间[6-7],通过Wi-Fi等无线控制方法,实现建筑照明节能。
1 室内定位技术国内外发展现状
基于GPS的室外定位系统已经日益成熟,定位精度达到分米级别。但是,当前我们的城市建筑,特别是现代建筑主要采用的都是钢结构,由于电磁屏蔽的影响,室外的基站或者卫星信号很难到达室内,GPS系统的性能在室内应用中大幅度下降,以至于无法满足定位精度的要求。
目前室内定位技术主要包括A-GPS、Wi-Fi、红外线、RFID(射频识别)、蓝牙、超声波、ZigBee、UWB(超宽带)等。蓝牙作为一种短距离的无线通信技术,因其抗干扰能力强、可集成性高、功能消耗小等优势受到越来越多的关注。蓝牙定位和其他定位技术相比,具有功耗小、使用方便等优点。蓝牙定位比Wi-Fi定位更精确,在成本上比Wi-Fi更低,在功耗上比Wi-Fi更小;蓝牙定位比ZigBee定位和RFID定位更方便。蓝牙4.0技术的更新,使得蓝牙设备的信号稳定性大幅增强,功耗显著降低、覆盖范围更广、传输速率更快、安全性更高,使得基于蓝牙的定位技术比其他室内定位技术有了更多的优势。
1.1 基于UWB的室内定位技术
2016年,包恺俊团队研究了一种基于UWB的定位系统[8]。该系统利用TOA获得距离,并利用圆周定位算法求解移动端坐标。该系统数据进行卡尔曼滤波,提高了定位的精度,并且将此系统运用于机器人餐厅服务。
2015年,苏应敢团队研究了非视距传播的UWB算法。该系统通过变量替换和非线性转换,引入松弛变量和搜索方法减小非视距传播对定位精度的影响,提高定位算法精度[9]。
1.2 基于WiFi的室内定位技术
2016年,黄华晋团队设计一种基于三角定位算法的WiFi室内定位系统。运用Android平台,根据WiFi信号本身的特点,并结合三角定位算法开发此系统,提高了定位精度[10]。
2014年,郗万新团队利用WiFi在安卓平台上实现精确定位。该系统对KNN算法的参数选取进行了改进,并利用加权平均法优化了定位算法。该系统提高了室内定位的精度[11]。
1.3 基于ZigBee的室内定位技术
2016年,侯启真团队通过三边加权质心算法实现室内人员定位。该系统使用三角测量法减小定位区域,并通过测试距离影响大小设置的权重变量来计算未知节点的估计值,从而改进了定位算法,算法误差小于传统算法[12]。
2014年,杜月林团队研究了基于ZigBee的RSS场景指纹定位法。该算法用RSS特定环境下的信息作为数据库中的指纹信息,该算法最终能够实现误差在两米以内的定位[13]。
1.4 基于蓝牙的室内定位技术
2015年,卞合善团队研究了低功耗蓝牙定位技术。该系统改进了RSSI测距模型,从参数获取的训练过程、信号平滑过滤和最终定位阶段这三个角度进行了优化。该系统实现了低功耗、高精度的定位[14]。
2012年,Mario Munoz-Organero团队运用蓝牙在应用层面上实现室内定位。系统利用应用程序级处理SDP服务记录,实现1到3米左右的平均误差,改善了BT参考基站之间的基本三角测量方法[15]。
1.5 性能分析
UWB定位技术功耗低、安全性高,但此技术传输速率低。
WiFi具有信号覆盖范围广、数据传输速率高等特点。但WiFi技术定位精度与锚节点的数目之间相关性很大,为了提高精度有必要适时添加锚节点的个数,但这样将会扩大数据库,导致信息查询速率变低,从而降低系统的实时性能。除此之外,若是定位环境产生变化,那么就必须建立全新的位置信息数据库,如此将大大增加系统实施过程中的工作量,加大系统定位的难度。
ZigBee室内定位技术由于ZigBee基站和定位模块普及率低、数据传输范围较小、时延较长,使得该技术并没有得到大面积推广使用,一般只使用在工业传感和智能家居方面。
蓝牙设备体积小、功耗低、成本低、设备应用范围广,从而为基于蓝牙的室内定位提供了技术优势。在室内定位环境中安装适量的蓝牙基站,当定位端的蓝牙设备开启时,基站就可以自动收集定位端的蓝牙信号数据,并通过系统运算获得定位端的当前位置。蓝牙4.0技术因其耗能低、范围广等优势得到广泛应用。
对于室内定位技术而言,应该具备设备简单易布置、成本投入合理、定位精度高、设备抗干扰能力强等主要特性。综合比较系统的可靠性、系统的建设成本以及定位的精度,WiFi定位和蓝牙定位比其他的定位技术更加适用于实际生活中。对于蓝牙来说,成本上比WiFi更低廉,所以本课题拟使用蓝牙4.0的技术初步实现人员定位,并对蓝牙信号波动较大的问题进行了改进,提高蓝牙室内定位的精度。
2 系统总体设计方案
基于人员位置的室内智能照明系统主要由信标发射模块、若干照明终端组群、分布式Wi-Fi网络、服务器处理模块和显示与管理模块构成。系统总体框架图如图1所示。如图所示,照明设备中的信标发射单元周期发送照明信息,通过分布式Wi-Fi网络,达到服务器端,服务器端程序通过智能算法,动态控制设备开/关或者其他运行状态,同时将相关状态显示给目标客户,使得相关方可以实时了解建筑电气设备当前的运行状态,以及使用的节能措施。
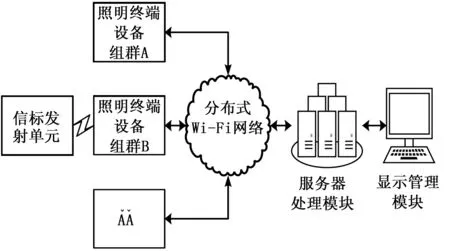
图1 系统总体框架图
图1中的照明终端设备组群具体结构如图2所示,包括蓝牙检测模块、Wi-Fi通信模块、光强传感器及若干照明控制开关。每个照明终端包括照明设备和开关控制器。Wi-Fi通信模块通过I/O口与开关控制器以及光强传感器连接,负责控制开关控制器和采集光强数据。蓝牙检测模块实时检测周围信标发射模块的RSSI信号强度,并将所有采集的数据通过Wi-Fi通信模块和分布式Wi-Fi网络发送给服务器处理模块。处理器模块根据获取的RSSI、Wi-Fi信号强度,使用机器学习方法,判断出人员所在位置,根据位置信息,控制相关照明设备,在人员无意识、不影响滞留人员舒适度前提下实现绿色节能。

图2 照明终端组群的结构示意图
照明终端组群的工作流程如图3所示,首先启动照明终端,寻找并与最近的无线访问接入点建立无线连接;接着实时检测周围的信标发射模块的RSSI和光强数据;然后将这些信息打包上传至服务器处理模块,同时等待接收服务器处理模块回传的控制命令,并根据该命令控制开关控制器,以此控制光源的开关状态。同时,每个无线接收点负责侦听信道,若发现有控制信息,则接收消息,并根据服务器所发出的控制指令,执行相关操作,同时将反馈指令传输到服务器,这种握手机制保证了每个终端的准确控制。在上述过程完成后,每个阶段继续进入侦听过程,如此重复。
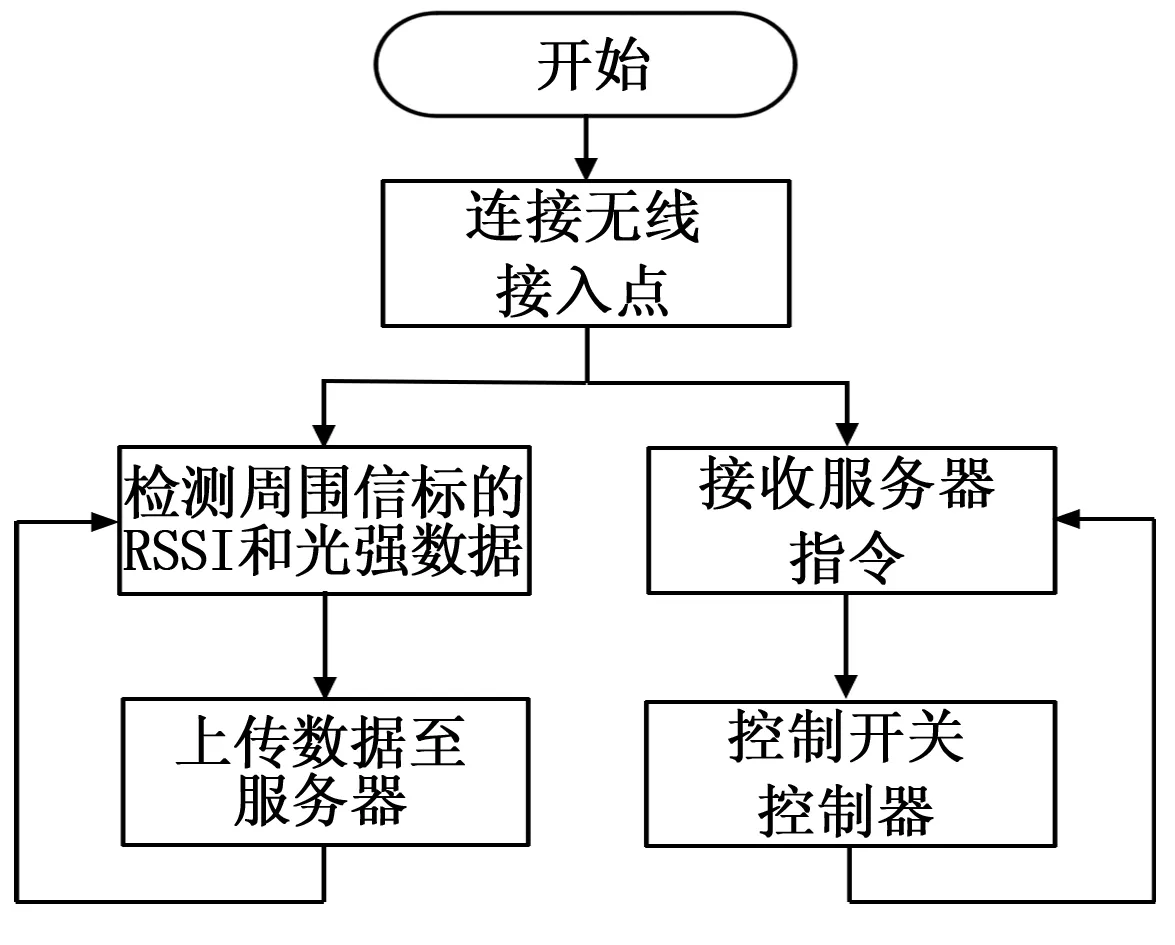
图3 照明终端组群工作流程图
如图4所示,服务器处理模块包括依次连接的通信单元、中央处理单元和存储单元。通信单元通过分布式Wi-Fi网络与照明终端保持连接,负责接收各个照明终端以及光强传感器的检测数据和转发至中央处理单元。中央处理单元与显示与管理模块以及通信单元连接,负责对数据进行分析处理,得到用户的位置信息以及控制信息,并将这些信息写入存储单元进行存储和发送至显示与管理模块用于实时显示和人工管理。
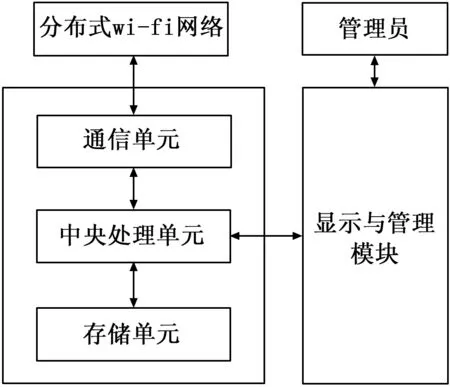
图4 服务器处理模块的结构示意图
服务器处理模块中的中央处理单元的工作流程图如图5所示,具体为:
1)解析包含各个光源状态信息、各个照明终端组群对应区域光强度信息、以及无线信标的列表及其RSSI的数据包,汇总数据,更加机器学习方法,判断用户目前的所在区域,为后续的操作奠定基础。
2)若在其中一个照明终端组群光照设备附近发现一个三次RSSI检测中两次高于阈值的无线信标,且当前该照明终端组群中的光照强度低于设定值,则中央处理单元将生成光照设备的开灯控制命令,并将该命令传送给通信单元让其负责转发至对应的照明终端组群。
3)将用户的位置信息以及控制命令存入存储单元,并将其输出至显示与管理模块进行实时显示。
显示与管理模块包括实时显示单元和管理单元,实时显示单元对服务器处理模块输出的数据进行实时显示,管理单元用于人工管理,如添加或删除该照明终端组群、添加或删除照明终端、设置环境阈值、设置使用场景、设置判断策略等。
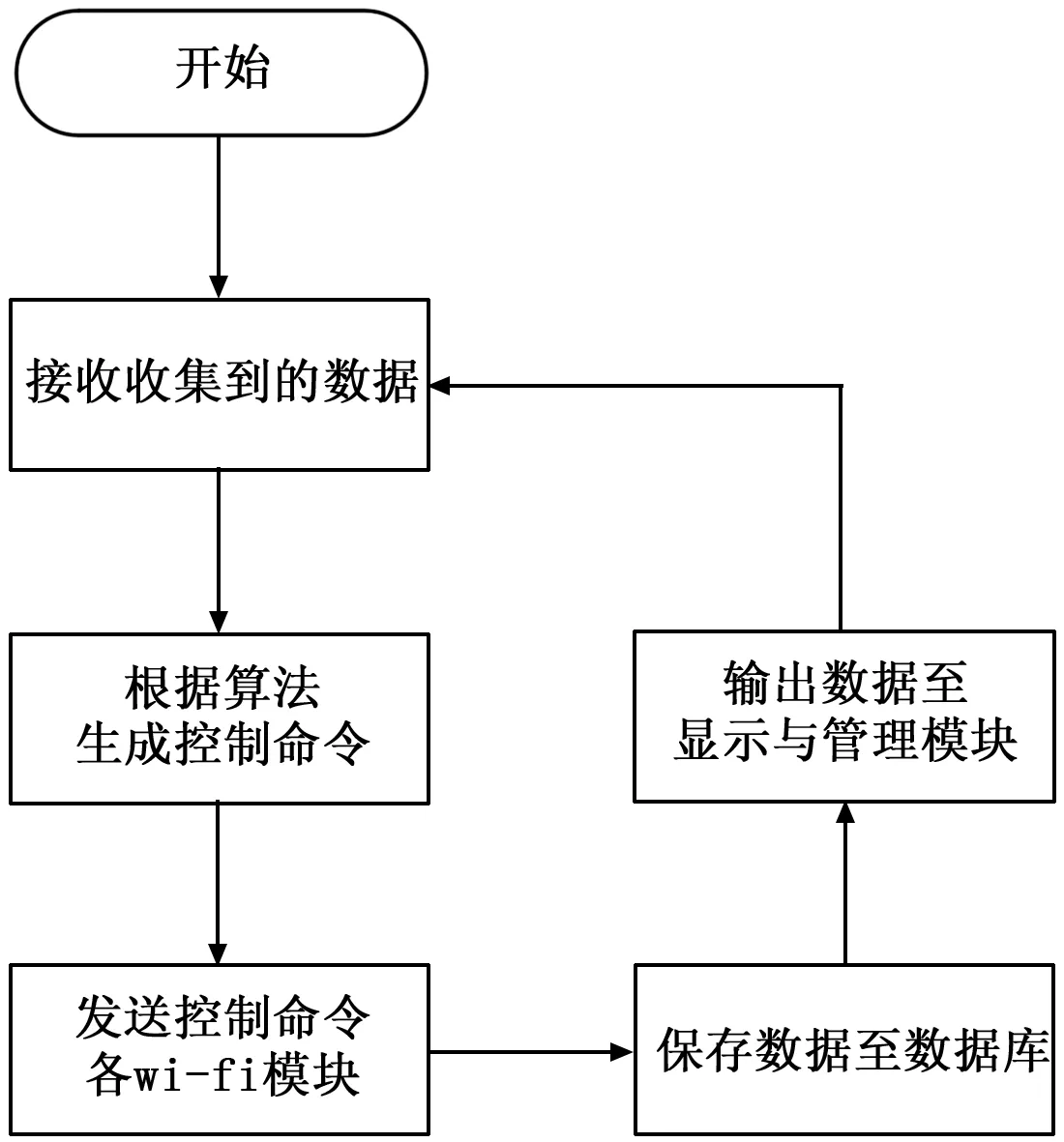
图5 中央处理单元工作流程图
3 系统测试结果分析
测试场所为环境较复杂的办公环境。在距离室内测量节点(信标发射模块)1米至8米间每隔1米设置一个RSSI检测模块,一共8个测试点,每个点采集2 000个RSSI数据。
检测区域示意图如图6所示,圆点O为RSSI检测模块,半径为r米的圆内为开启区,半径为R米的圆外为关闭区,中间的圆环区域为缓冲区。当计算的距离在开启区则打开照明系统,否则关闭照明系统。该系统的误判率即为区域判断出现误差的概率。
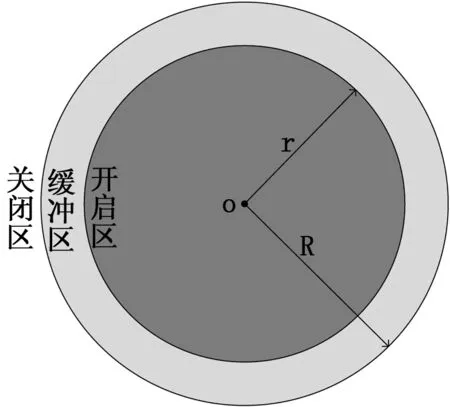
图6 检测区域示意图
(1)
然后通过高斯滤波选取高概率出现的RSSI值,再对其取算数平均值。RSSI服从高斯分布,它的高斯概率密度函数为:
(2)
其中:
(3)
(4)
可得:
P(μ-σ≤RSSIj<μ+σ)
=F(μ+σ)-F(μ-σ)
=φ(1)-φ(-1)=0.6826
(5)
其中:
(6)
(7)
(8)

图7 RSSI与距离关系图
通过将5米时出现次数较多的多个RSSI值设为阈值,计算得到的误判率如图8所示。由图9可以看出,当将RSSI阈值设为-61 dBm时,系统测量误判率最小,为1.14%。

图8 阈值与误判率关系图
系统的灯亮的时间t与人员行走速度v、探测距离r、系统延时T、误差引起的时间差值δ和人员滞留时间α有关,即:
(9)
式中,因为误判引起的时间差值远小于软件系统设定的延时,所以δ可以忽略不计。滞留时间α是随机数,其值不定。在不考虑人员滞留时间α的情况下,计算得到在人员以1.50 m/s的平均速度经过探测范围时灯亮的平均时间约为25.33 s。因此,相较于目前常用的声控灯(一般单次亮灯时间为30 s左右),该系统可以节省约15.56%的照明电能。
4 结语
本文提出的基于人员位置的室内智能照明系统结合RSSI测距技术、Wi-Fi通信技术和自动化控制技术,使照明系统可以实时收集照明终端组群中的人员位置,且可以根据管理员的预先设定对收集到的数据进行智能化管理和分析,有效实现对照明系统的智能管理和控制。此外,该系统误判率低、操作简单、使用便捷,大大节约了电力资源,满足现有需求。
猜你喜欢
工业设计(2022年7期)2022-08-12 13:18:58
现代苏州(2021年3期)2021-09-10 07:12:13
江苏教育研究(2020年28期)2020-11-23 07:30:10
现代装饰(2020年8期)2020-08-24 08:22:58
铁道通信信号(2019年9期)2019-11-25 01:44:58
家庭影院技术(2018年10期)2018-11-02 05:35:26
家庭影院技术(2018年3期)2018-05-09 07:06:11
网络安全和信息化(2017年3期)2017-03-10 07:45:51
玩具世界(2017年8期)2017-02-06 03:01:38
电子制作(2016年15期)2017-01-15 13:39:14
