用于ADS-B解交织的高增益稳健PA算法
2018-07-26 00:21赵敏同
信号处理 2018年9期
卢 丹 赵敏同
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
1 引言
ADS-B系统由多个地面站和机载站构成,机载ADS-B通信设备依靠全球定位系统(Global Position System,GPS)定位,并将飞机的识别号、经纬度、高度等信息以广播式发出,使周围飞机和地面站能都对其实时监测。目前ADS-B 监视系统有三种工作架构:S模式1090ES数据链、UAT数据链和VDL- 4数据链。其中基于S模式1090ES数据链的ADS-B系统由二次雷达S模式发展而来,与二次雷达监视手段相比,其精度更高,成本更低,广泛地应用于各大机场。随着越来越多的飞行器开始配备ADS-B收发设备,使用ADS-B的空域流量逐渐增多,且ADS-B信号以随机接入方式广播,难免会出现信号交织问题。其中,两条信号交织问题最常发生[1-2]。
由于二次雷达与ADS-B信号体制相近,国内外一些解决二次雷达信号交织的方法可以应用于ADS-B交织问题,这些方法可以分为时域解交织和空域解交织。时域解交织利用的信息有限,通常需要附加特定条件[3- 4]。而空域解交织具有空间分辨能力,成为国内外研究热点。其中一类是基于空间信号波达方向(Direction of Arrival,DOA)估计的方法,例如文献[5]应用最大似然估计法解交织,但需要阵列校准或信号重构;另一类则应用盲源分离算法,如快速独立主成分分析(Fast Independent Component Analysis,FastICA)[6-7]、曼彻斯特解码(Manchester Decoding Algorithm,MDA)算法[8]、PA算法[9]等。FastICA算法通过矩阵迭代求出分离权矢量的过程中,若初值选取不当会直接影响算法收敛性;MDA算法求解较繁杂,且低信噪比下解交织的性能有待提高。而PA有较强的稳健性,且不需要阵列校准或矩阵迭代。但PA算法是利用投影技术抑制其中一条源信号,从而获得另一条源信号,对目标信号无增强能力。本文将PA算法与Capon算法[10]相结合,使其在一条信号方向上形成零陷,同时在目标信号的方向上形成主瓣,利用天线阵增益提高目标信号的输出信噪比,同时应用RCB算法,减小导向矢量的估计误差,进一步提高了算法的稳健性。
2 信号模型
1090ES数据链的ADS-B消息格式采用脉冲位置调制(Pulse Position Modulation,PPM)编码,其消息时序特征如图1所示,ADS-B信号发射信息的脉冲宽度为0.5 μs,帧总长度为120 μs,包含8 μs前导脉冲和112 μs的数据块脉冲,来自飞机或地面的监视系统提供的飞机高度、经纬度、航班号、飞机状态等信息存储在112 μs数据块中[11]。
考虑一个间距为半波长的M阵元等距线阵,当L个ADS-B信号交织时,阵列天线收到的信号为:
(1)
式(1)中:x(t)表示阵列接收数据,n(t)为高斯白噪声,a(θl)为第l个ADS-B信号的导向矢量,且a(θl)=[1,e-jπsin θl,...,e-j(M-1)πsin θl],sl(t)表示第l个ADS-B源信号。由于两条信号交织的现象最为常见,所以本文以L=2为例,进行算法的推导和验证。
3 高增益的稳健PA算法
3.1 PA算法原理
假设接收到的信号x(t)由两条ADS-B信号交织组成,时域波形如图2所示。
由图2可以看出,从t1到t2时刻,只有信号1的信息,t2到t3时刻两条ADS-B信号交织,从t3到t4时刻,只有信号2的信息。这里可以通过对接收到的数据进行分段奇异值分解,将特征值重组成关于时间的函数,由特征值的分布情况即可检测信号的交织时刻,具体交织检测方法在文献[9]中给出了详细介绍,这里不再赘述。分别令[t1,t2]和[t3,t4]时间段内接收的信号为x1(t)和x2(t),可以写成如下形式:
x1(t)=a(θ1)·s1(t)+n1(t)
(2)

图2 两条ADS-B信号交织时域波形图Fig.2 Two overlapped ADS-B signals in time domain
x2(t)=a(θ2)·s2(t)+n2(t)
(3)

(4)
p1是信号1在交织信号上的投影,应用投影除去交织信号中的信号1,可获得信号2的信息。则解交织后的ADS-B信号2可以表示成如下形式:
s2(t)=(I-p1)*x(t)
(5)
同理可获得解交织信号1。
3.2 高增益稳健的解交织算法
PA算法是将一条信号投影到目标信号的零空间上,从而分离出目标信号,但对目标信号无增强作用。考虑到PA算法可以得到目标信号导向矢量的估计,将其与Capon算法相结合,可以提高目标信号的输出功率,进而提高输出信噪比,为了方便,将此方法称为Capon-PA算法,Capon算法的推导过程可参考文献[10],这里不做赘述。则Capon-PA解交织的信号1权矢量w1可表示为:
(6)
其中,Rx为交织信号x(t)的协方差矩阵。
由于PA算法采用大奇异值对应的奇异矢量作为信号导向矢量的估计值,可能会存在指向误差,使算法的性能下降[12]。对此,本文依据RCB算法[13]精确估计实际的导向矢量来改善Capon-PA算法的稳健性,提出了高增益的稳健PA算法,简称RCB-PA。为了推导RCB算法,有下面的优化函数:
(7)
(8)
其中,k是拉格朗日乘数因子,且k≥0。对Rx进行特征值分解,U的列向量对应于Rx的特征向量;Λ的对角线元素(Λ1≥Λ2≥…≥ΛM)对应于其相应的特征值。令:
(9)
把式(8)代入约束条件中,定义:
(10)

(11)
利用牛顿迭代法可以求解式(11)中的拉格朗日乘数因子k,代入式(8)就可以得到信号1实际导向矢量的估计值,信号2同理。
至此,基于PA的高增益稳健解交织算法具体步骤如下:
(1)对仅存在信号1的数据x1(t)进行奇异值分解,大奇异值对应的奇异矢量u1为信号1导向矢量的估计值;
(2)利用牛顿迭代法求解式(11)中的拉格朗日乘数因子k;

(4)利用Capon方法计算权矢量有:w1=
(6)利用ADS-B接收机对解交织信号s1(t)和s2(t)进行解码。
本文算法流程图如图3所示。
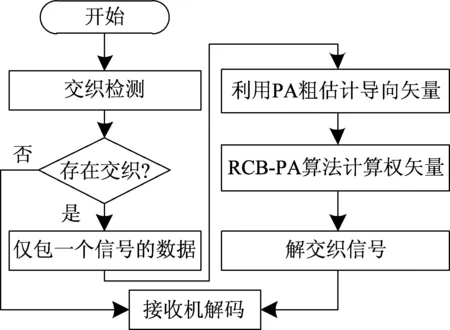
图3 算法流程图Fig.3 The flow diagram of algorithm
表1给出了PA与RCB-PA算法的运算量及运行时间比较,其中仅有信号1存在的数据长度为N1。可以看出,RCB-PA与PA的运算时间和运算量相当,改进的算法几乎没有提高复杂度。
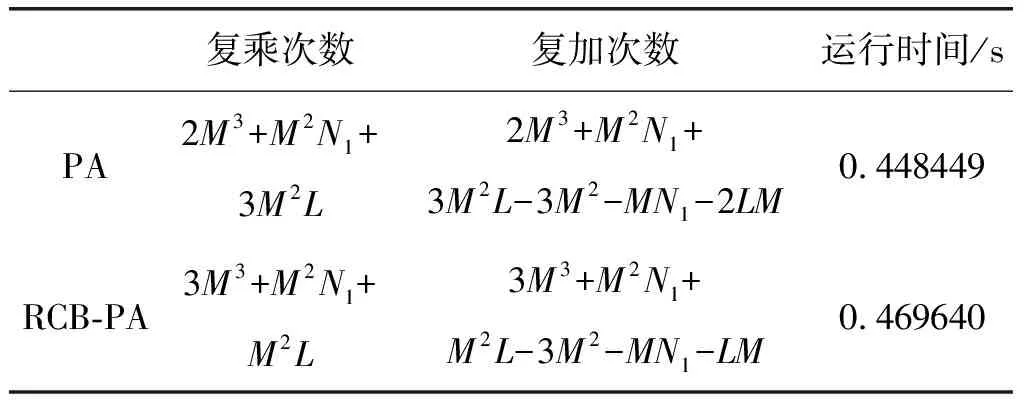
表1 运算量比较
4 仿真实验结果
仿真实验采用间距为半波长的4阵元等距线阵处理两条ADS-B信号交织,采样频率为40 MHz。其中一条信号的来向为-20°,信噪比为19 dB,数据位信息:飞机号780123,高度34100 ft,经度117.5,纬度37.5;另一条信号的来向为30°,信噪比为20 dB,数据位信息:飞机号780ABC,高度32100 ft,经度117.8,纬度37.4。两条信号的相对时延为50 μs。
图4是交织信号时域波形图,将交织信号以4 μs为一个区间做奇异值分解进行交织检测,根据噪声信号特征值服从卡方分布,选择合适的检测门限。特征值1、特征值2及检测门限的分布情况如图5所示,从图4和图5可以看出:0~50 μs和120~170 μs仅有一个特征值超过检测门限,由于ADS-B信号固定120 μs的信号长度,则可判断0~50 μs仅包含信号1的信息,120~170 μs仅包含信号2的信息。然后利用检测到的仅有一个信号的数据区间估计导向矢量。

图4 交织信号时域波形图Fig.4 Overlapping signal in time domain
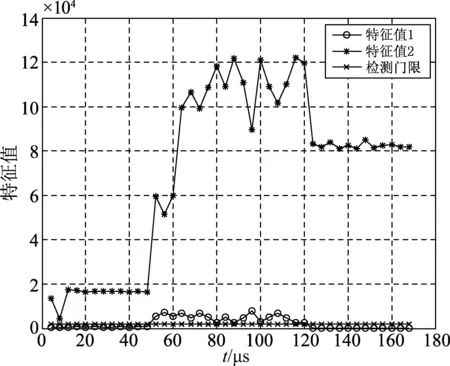
图5 特征值分布曲线Fig.5 Eigenvalue distribution curve
图6比较了PA、Capon-PA和RCB-PA算法解交织的信号1阵列方向图,由图6可以看出:PA算法仅在信号2来向30°处形成零陷,抑制了信号2,在信号1来向无增益;Capon-PA算法在抑制信号2的同时在信号1来向-20°处形成较宽主瓣,但存在指向误差;RCB-PA算法在Capon-PA算法的基础上可以较精确的在信号1来向上形成主瓣,说明应用RCB改进的PA算法能够抑制其中一条信号,同时较准确地在另一条信号来向上获得主瓣增益。
图7将RCB-PA算法解交织的两条信号与源信号的时域波形进行对比,从波形幅度看,经本文算法处理后的信号输出功率高于源信号,所以输出信噪比也会提高。

图6 PA、Capon-PA 和 RCB-PA解交织信号1阵列方向图Fig.6 Direction chart of separated signals of PA、Capon-PA and RCB-PA
为了进一步验证RCB-PA算法的分离结果,将解交织的两条信号在接收机中解码,结果如表2所示:表中数据与仿真的ADS-B信号信息一致,可获得与仿真相同的飞机识别号、飞行高度、经纬度等信息。

图7 源信号与解交织信号时域波形对比图Fig.7 Contrastive figure of original signals and separated signals in time domain

表2 接收机解码结果
为验证RCB-PA算法的准确性,图8比较了输入信噪比对ICA、MDA、PA和RCB-PA解码正确率的影响(所用接收机可以解码信噪比9 dB以上的ADS-B信号)。可以看出,在输入信噪比大于10 dB时,四种算法的解码正确率都呈上升趋势。ICA算法对初值选取敏感影响算法稳健性,使得解码正确率出现波动;MDA算法对信噪比要求较高,在14 dB以上才能保证解交织正确率,不适用于低信噪比的交织信号;PA在输入信噪比12 dB以上时解交织正确率大于95%;而RCB-PA算法在7 dB的输入信噪比时,其解码正确率就已超过95%,说明RCB-PA算法提高了低信噪比交织信号的解码正确率。

图8 解码正确率与输入信噪比关系曲线Fig.8 The relation curve between the decoding accuracy and the input signal to noise ratio
为了更清晰说明RCB-PA算法对信号输出信噪比的影响,图9将其与ICA、MDA和PA算法的输出信噪比进行比较。由图9可知,在相同输入信噪比时,PA算法的输出信噪比高于MDA算法和ICA算法,而RCB-PA要比PA算法的输出信噪比高约6 dB,因此RCB-PA解交织算法能够获得更高的输出信噪比。

图9 输出信噪比与输入信噪比关系曲线Fig.9 The relation curve of the output signal to noise ratio and the input signal to noise ratio
5 实采数据结果
为了进一步验证算法的有效性,本小节通过实采数据验证算法的性能。阵列天线实物如图10所示,实采数据是除备用天线外的其他5个阵元在机场附近接收到的ADS-B信号,阵列间距d=0.091 m,采样频率80 MHz。将接收到的两条信号进行人为交织,交织信号时域波形如图11所示,可以看出信号1的幅度约为14 dBm,信号2的幅度约为9 dBm。

图10 阵列天线实物Fig.10 Array antenna

图11 实采交织信号时域波形Fig.11 Time domain waveform of test overlapped signal
图12将RCB-PA与PA算法的实采数据解交织波形图进行比较,由图(a)和(b)可以看出,利用PA算法获得信号幅度与源信号基本相等;而图(c)和(d)利用RCB-PA算法解交织获得的信号中,信号1的幅度达到了30 dBm,信号2的幅度增加到20 dBm,所以RCB-PA算法能够有效地提高信号的输出功率。
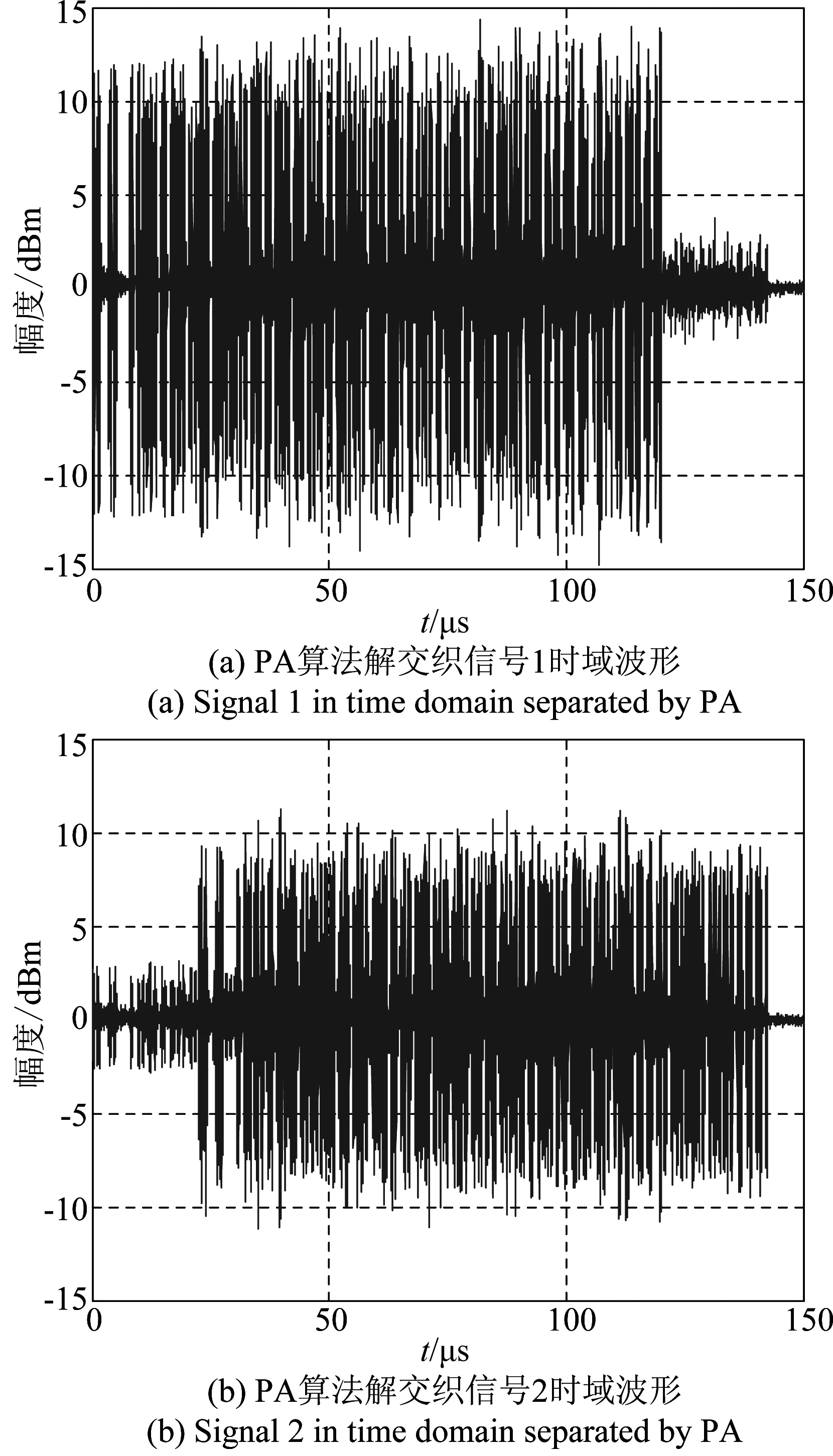

图12 实采信号解交织时域波形Fig.12 Separated test signals in time domain
将交织实采信号和解交织后的两条ADS-B信号经接收机解码,结果如表3所示,交织信号无法通过CRC校验,而经RCB-PA算法解交织后的信号则可以通过CRC校验,能够解出正确的飞机信息。

表3 时采数据接收机解码结果
6 结论
针对ADS-B交织问题,考虑到PA在解交织时具有不需要阵列校验、训练序列等优点,本文结合了Capon波束形成和RCB算法,提出了高增益的稳健PA算法。通过仿真和实采实验表明:高增益的稳健解交织算法不仅能较准确地分离交织信号,而且利用阵列信号处理带来的增益,在保证算法稳健性的同时提高了信号的输出信噪比,降低了算法对输入信噪比的要求,使得低信噪比交织信号处理的性能得到一定的改善。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
中国石油石化(2022年12期)2022-07-16
美食(2022年2期)2022-04-19
中国外汇(2019年19期)2019-11-26
女报(2019年3期)2019-09-10
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
知识经济·中国直销(2017年10期)2017-11-07
科技视界(2016年8期)2016-04-05
华人时刊(2016年17期)2016-04-05