
无人机在高潜水位采煤沉陷土地测绘中的应用
2018-07-25 05:36陈佳乐孙浩轩张纯梦
中国煤炭 2018年7期
陈佳乐 肖 武,2 任 河 孙浩轩 张纯梦 韩 森
(1.中国矿业大学(北京) 土地复垦与生态重建研究所, 北京市海淀区,100083;2.浙江大学公共管理学院,浙江省杭州市,310058)
煤炭是我国的主体能源,煤炭资源90%以上的产量来自于井工开采,且多采用走向长壁全部垮落法开采,地表不可避免地产生下沉,造成大量土地的沉陷损毁。我国东部矿区多为高潜水位矿区,且煤炭区和粮食区的复合面积较大,煤炭开采对地表造成的扰动致使大量优质耕地塌陷变成了积水区。加强对高潜水位矿区地表的实时监测,有助于选择合适的复垦时机以及复垦技术,并采取有效的复垦方式,从而提高耕地恢复率,为改善地表生态环境以及景观格局优化等规划提供良好的借鉴。
对于高潜水位矿区的地形测量与监测,以往多采用全站仪与水准仪等传统测绘手段,由于受到开采沉陷地面积水的影响,增加了传统测绘作业的难度。加之受到地理环境的影响,仅靠测量人员进行测量,时间周期较长,且测量范围有限。近10年来,InSAR、DInSAR、三维激光扫描技术以及GPS-RTK等技术都广泛的应用于采煤沉陷地的土地测绘中。李强等人利用三维激光扫描技术对矿区采煤塌陷地的形变进行了监测;吕丽萍将改进后的RTK计算机技术应用到矿区的采煤沉陷地的测量中,并结合实地测量数据对其进行误差分析和精度评估;于知立基于InSAR数据对双鸭山煤矿沉陷进行了时间序列的监测,分析得到了一定的采煤沉陷规律;李爱国采用DInSAR技术对矿区地面沉降进行了实验研究,获取了DEM高程偏差及地表沉降的发育情况,并结合地面测量结果进行了分析。以上技术都显著提高了测量的效率,但仍存在一些缺陷。比如RTK技术在植被茂盛的区域会有信号丢失的情况,而InSAR技术在地面快速沉降区域的失干涉也一直是无法解决的难题,三维激光扫描仪使用相对复杂,且在平原地区其应用也受限。
为了进一步探讨无人机影像在高潜水位矿区采煤沉陷地土地测绘中的应用,本文以山东省济宁市东滩煤矿3304工作面为例,利用无人机航测获取研究区高分辨率影像,处理后得到研究区的正射影像和数字高程模型,并结合地面RTK测量数据对两种测绘方式获得的DEM进行了精度分析。
1 研究方法
1.1 研究区概况
东滩煤矿位于山东省济宁市境内,跨兖州、邹城、曲阜三市(县),地理位置为116°50′49″~116°56′56″E,35°24′11″~35°31′25″N。地处鲁中低山丘陵到平原洼地的过渡地带,整体地势由东北向西南逐渐降低,潜水埋深为2 m左右,属于高潜水位矿区。矿区内土壤类型多为褐土,土质较好,土壤肥沃,耕性良好,是重要的粮食产区。矿区内主要河流有白马河与泥河,向南流入南阳湖,均为季节性河流。研究区为东滩煤矿3304工作面开采影响的范围,并将研究区分为常年积水区、季节性积水区、非积水区3个部分,研究区概况如图1所示。

图1 研究区概况
其中3304大采高综放工作面位于三采区南部3号煤层,工作面走向长约为1064~1161 m,倾向宽约为260 m,地面标高为+50.16~+51.28 m,平均高度为+50.72 m,开采标高为-519.1~-476.5 m,平均高度为-497.8 m。所采煤层煤厚度为7.60~10.50 m,平均厚度为8.30 m,煤层倾角为2°~6°,平均倾角为4°,煤层倾角较为平缓。自2014年8月开始开采这个工作面后,地面已经形成了大面积的沉陷区,加之潜水位较高而汇集成为大水面,南北方向也建成了一条随塌随垫的公路用以连接北宫和北店两个自然村。沉陷区内常年积水,水生动物、植物丰富,边缘为沼泽和湿地,水生植物分布密集。
1.2 数据的获取
1.2.1 航测数据的获取
(1)航测方案的规划及实施。本次航测采用的是大疆M100四旋翼无人机,该无人机最大载重为1.5 kg,最大飞行高度为500 m,GPS模式下无负载最大飞行速度为17 m/s,机身采用碳纤维材料,灵活轻盈,续航时间最长可达40 min,飞行平台可灵活扩展,具备二次开发功能,且M100配备稳定的飞控和GPS定位功能,使飞行姿态更加平稳,保证按照预设航线飞行。无人机搭载大疆X3云台相机,有效像素为1240万,单个像素大小为1.55 μm,传感器焦距为3.6 mm,快门速度为8~1/8000 s,照片最大分辨率为4000×3000。经现场踏勘后,利用大疆GS-pro 地面站来规划整个航测方案,参照低空数字航空摄影规范,确定重叠度(航向为80%、旁向为60%),考虑要覆盖到整个积水区域和后期处理过程中边缘部分容易发展畸变,最终确定航测范围为2.12 km2,主航线15条,航线走向为东西走向,相对航高120 m,绝对航高170 m,分辨率为4.99 m/pix,飞行速度为10 m/s。实施时间为2017年10月15日,此时地面玉米刚收割完毕,主要以裸土为主。测区天气晴朗无风,作业条件良好,起飞时间选择在上午11点,符合航测最佳时间段标准,整个航测任务共耗时55 min 59 s,共拍摄照片811张。
为了保证后期的成图精度,航飞前在测区布设控制点13个,其中像控点8个,检核点5个。控制点应均匀分布在整个测区范围内,尽量不共线,控制点先用石灰粉布设成1 m×1 m的十字丝,然后在十字丝中央钉入15 cm长的木桩,再在木桩的中央钉入钢钉,后采用GPS-RTK(南方银河一号)进行控制点的实测。 控制点分布见图2。
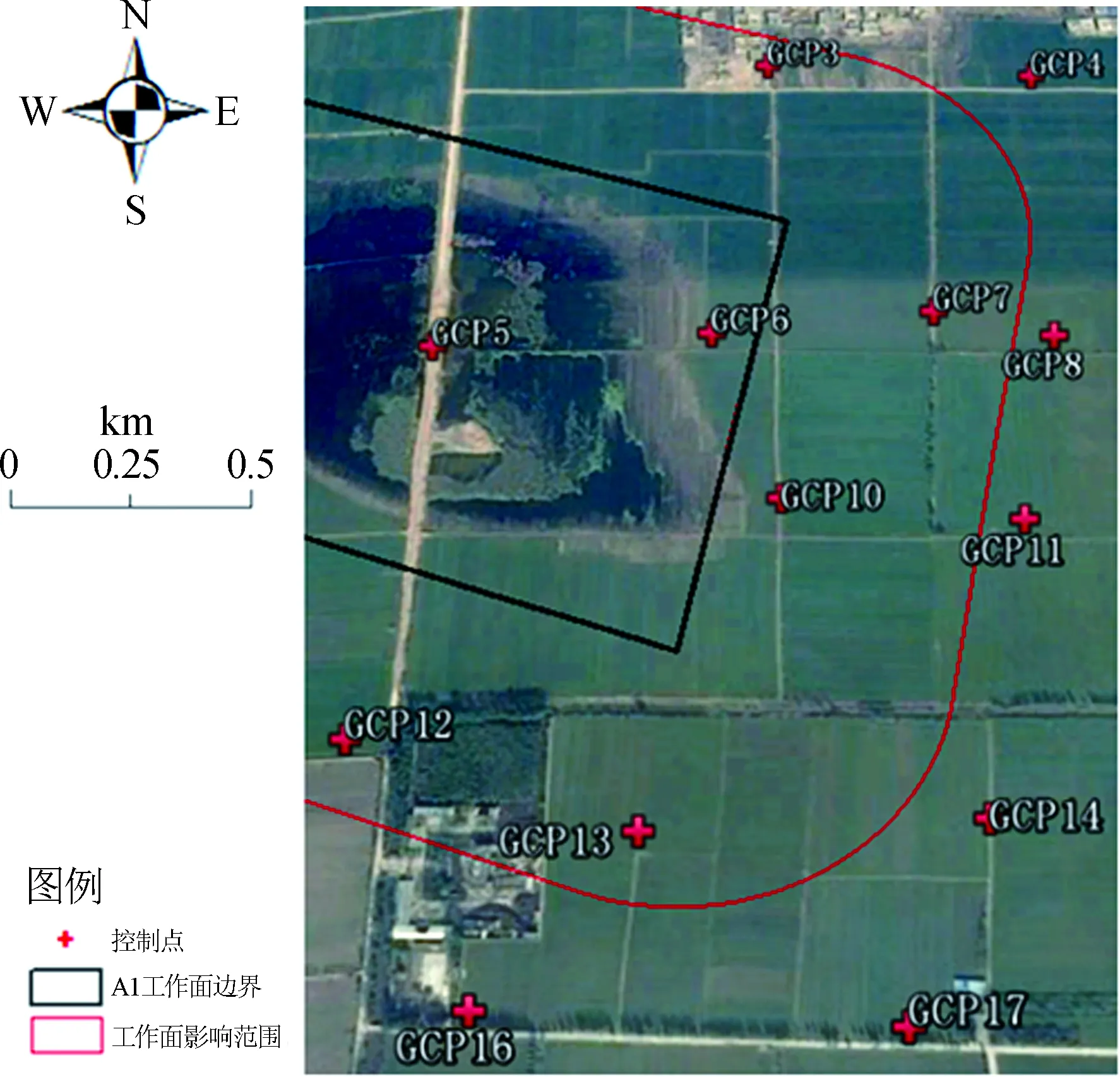
图2 控制点分布
1.2.2 地面测量数据的获取
在进行航测的同时,在研究区内利用RTK-GPS(南方银河一号)接入山东省CORS网,并经过矿区已知点校正,同步进行碎部点测量,为保证后期生成DEM精度可靠,除去常年积水区无法深入,其它部分均按照10 m×10 m的格网覆盖,其中在特殊的地形地貌进行加密至5 m,如测区主要道路、陡坡、沉陷地边缘等。因测区较大,地面测量共耗时3 d,共测得4535个点。
原来,那天我见到的小女孩名叫妮妮,是沙莉上大学时做家教辅导的学生。似乎听说她爸爸职位很高,但沙莉从未和妮妮的爸爸见过面。她每次去给妮妮上课都是在下午,她爸爸都不在家。
1.3 数据处理过程
1.3.1 航测数据的处理
基于运动恢复结构算法、计算机视觉与摄影测量学原理,可在不依赖相机校验或其它先验信息提供位置、姿态或几何关系前提下,更好地将序列航测影像重建为三维模型,重构像点位置、相机内外方位元素和场景的三维模型,经地面像控点的绝对坐标实现影像校正,有些地区甚至可免像控达到工程制图要求。许多此类软件已被验证和应用,包括Pix4Dmapper 和Agisoft PhotoScan、inpho等。本次实验数据的处理选用Pix4Dmapper Pro,系统自带平差系统,无需借助第三方软件转换,结果可以直接导入ENVI、Arcgis等软件。
选8个像控点,通过初始化处理、点云和纹理、DSM和正射影像这3步,输入有限的约束条件可得高精度三维重建模型DTM、DSM和DOM,其中数字高程模型(DEM)即地形表面形态的数字化表达,它是用一组有序数值阵列形式表示地面高程的一种实体地面模型,是数字地面模型DTM的一个分支;数字表面模型(DSM)指物体表面形态以数字表达的集合,其中DEM必须是高程信息,是地表的模拟,一般来说,需要对DSM进行加工,去掉房屋、植被等信息,才能得到DEM;数字正射影像(DOM)是对航空(或航天)相片进行数字微分纠正和镶嵌,按一定图幅范围裁剪生成的数字正射影像集,它是同时具有地图几何精度和影像特征的图像。本研究区无人机获取数据时期范围内绝大部分区域已完成小麦收割,地面裸露,无人机影像处理得到的DSM在地表裸露处只表达地面高程这一要素,等同于DEM。
1.3.2 地面测量数据的处理
在完成RTK实地测量后,在室内利用银河一号RTK配套软件将数据导出dat文件,在EXCEL中转换格式后导入ARCGIS,然后进行展点,并给其赋予坐标系,此处选用的是中央经线为东经117°的高斯-克吕格投影的三度带分带的西安80坐标系,该坐标系统和无人机影像的地面控制点的坐标一致,以方便后期将2个DEM校正到同一坐标系统下。最后在ARCGIS中利用工具3D Analyst-Data Management-TIN生成所有点的高程数据的TIN,接着利用工具Transfer-From Tin To Raster生成地面测量数据覆盖区域的DEM。
2 结果和分析
无人机摄影测量相比较传统的地面测量有一些优势,其中最主要的一点是,当照片在空中被获取到,一些其它的飞行信息也同时被记录下来,例如飞行的高度、相片的坐标、飞机的瞬时速度等,这些信息是属于照片的外方位元素。在处理图像之前还要注意消除各种错误,例如色差、噪音和畸变等。经过对影像优化后,相片会在软件中自动对齐,随后利用地面控制点对其精确校准。航拍影像处理的最终结果就是能够表示三维模型的点云,然后这些点云被输出到ASCII编码的文本文件中,在输出中,除了坐标之外,还有与RGB颜色模型中的像素的真实颜色有关的数据,点的颜色是来自航拍照片。这些点都被用来形成一个连续的表面网格模型,无人机影像生成DEM如图3所示。
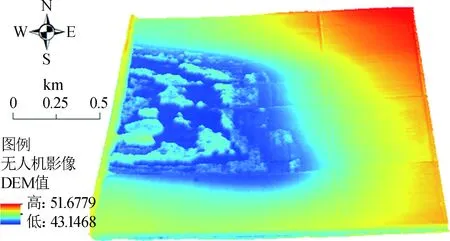
图3 无人机影像生成DEM
与此同时也通过地面RTK测量得到的点获得连续的表面网格模型,RTK数据生成DEM如图4所示,空白处为水域,无法进入。
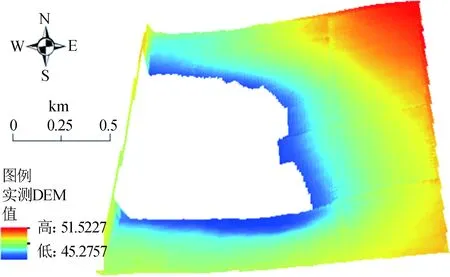
图4 RTK数据生成DEM
为了评定无人机摄影测量生成模型的精度,选取5个实测的地面检核点的坐标与从无人机影像生成的模型上提取对应的检核点的坐标进行对比,平面精度和高程精度对比结果见表1。
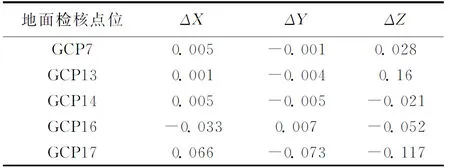
表1 平面精度和高程精度对比结果 m
由表1可以看出,就平面误差而言,X、Y方向最大误差分别为0.066 m和0.073 m,平均误差分别为0.022 m和0018 m,因此检验核对结果均符合规范中1∶500比例尺的平面精度限差(≤0.175 m)。其中较大误差值都是在16、17号点位出现,这是由于这两个检核点所在位置周围有高大树木,如图2中所示,故而影响了测量时信号的接收,导致了点位的精度变低。Z方向的最大误差为0.016 m,平均误差为0.075 m,也基本满足1∶500比例尺制图的高程限差(≤0.15 m)。航测地面检核点的整体精度用RMSE(均方根误差)来表示,采用RMSE来评价数据的整体精度,RMSE决定了地面RTK测量的高程数据与无人机影像生成的DEM数据之间的偏差分布,RMSE值更低说明两组数据的偏差更低,即观测值更接近于真值。此次航测地面检核点的X、Y和Z方向的均方根误差分别为0.0332 m、0.0329 m、0.0929 m。根据Pix4Dmapper软件的成图精度规范,检核点的均方根误差应小于两倍的地面分辨率GSD(Ground Simple Distance),而本次无人机影像的地面分辨率是0.05 m,各方向上的RMSE均小于2GSD=0.1 m,满足成图精度的要求。
2.1 无人机影像DEM精度分析
将图3和图4在Arcgis中校正到同一坐标系下,然后进行栅格差值计算,得到两个模型整体的比较结果,DEM差值整体分布如图5所示。
由图3和图4可以看出,普通地面测量无法对研究区内常年积水区进行详细测绘,而无人机摄影测量获得的DEM在测区整体细节表达上更加详尽,可以很好地捕捉到诸如常年积水区内植被、季节性积水区地貌及非积水区内道路网、陡坡等特殊和复杂的地表特征,季节性积水区植被茂盛,影像获取的DSM带有植被高度,而RTK测量DEM只是地表的高程信息;非季节性积水区陡坡与道路网坡度变化显著,需要足够多的点位信息来表达,无人机获取的点位信息远多于地面测量,生成的DEM精度也较高,导致研究区内季节性积水区和非积水区的道路和陡坡区域无人机影像DEM与RTK测量DEM相差最大。因此,只依靠常规的测量方式对高潜水位采煤沉陷地的测绘是不太可行的,且此类方法技术难度大、耗时长、成本高。
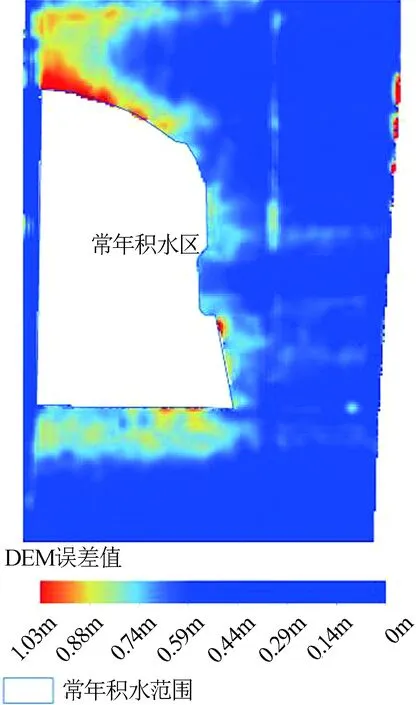
图5 DEM差值整体分布
为了更清楚地表达无人机摄影测量生成的DEM与RTK测量DEM的差值出现的区域和比例,特将2个DEM之间的所有的点的误差值分为以下几个范围:△H≤0.05 m,△H≤0.15 m,△H≤0.30 m,△H≤0.55 m,并绘制出各等级误差点云的分布图, 各等级误差点云的分层次表达如图6所示,各等级误差点云个数及比例见表2。
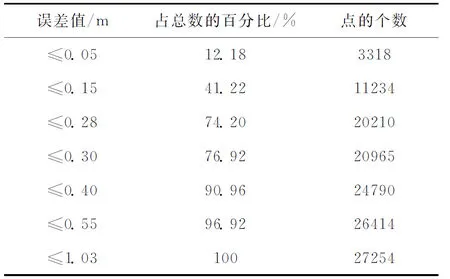
表2 各等级误差点云个数及比例
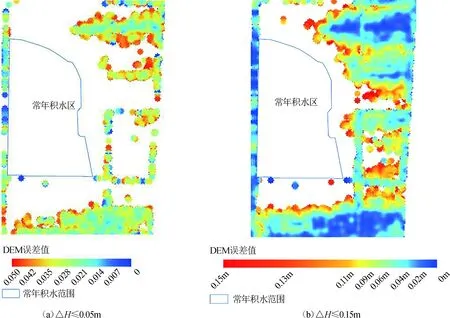
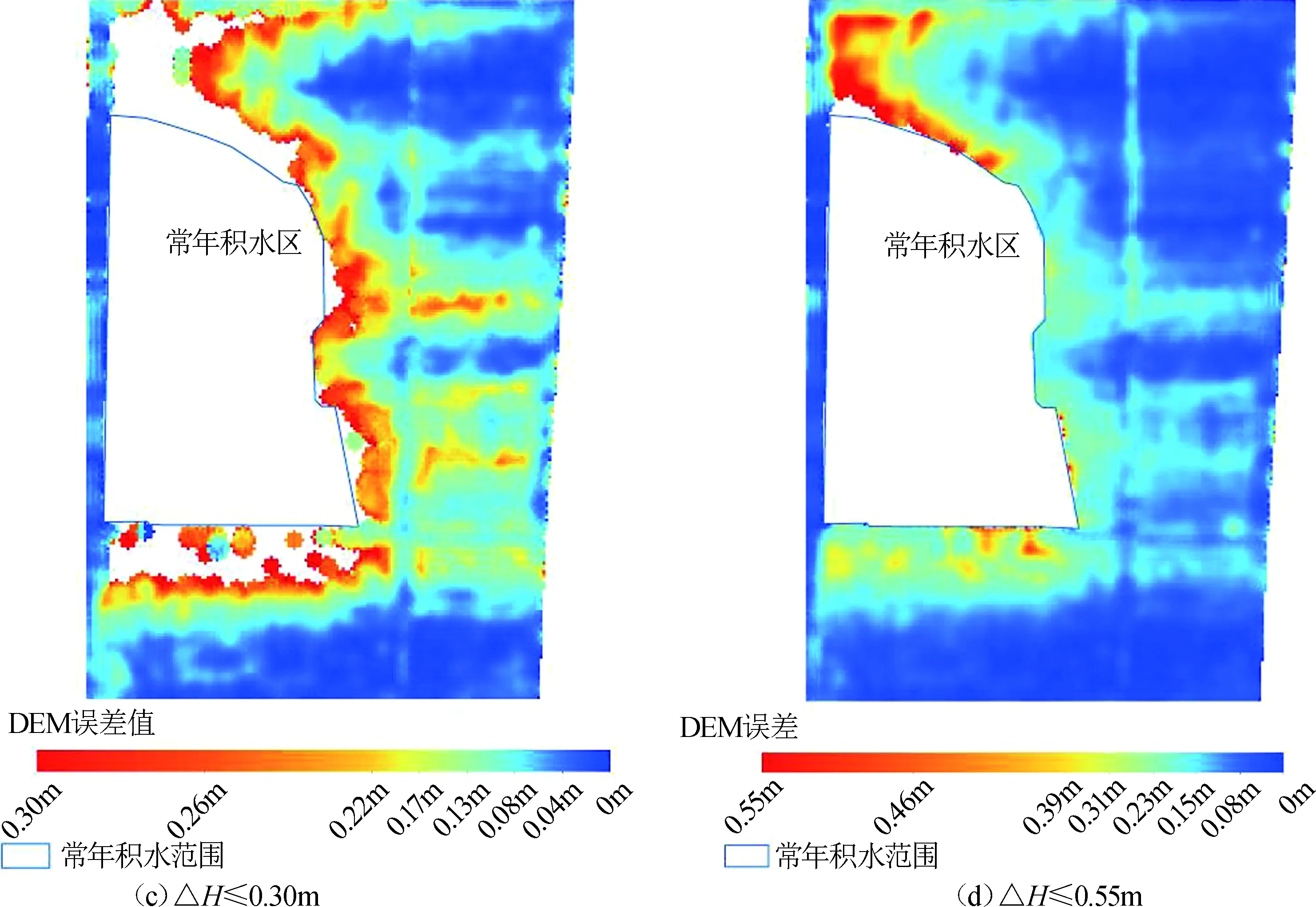
图6 各等级误差点云的分层次表达
研究表明, 整个研究区内74.20%的点云数据满足平原1∶1000比例尺的制图精度要求(≤0.28 m),无植被覆盖的非积水区内点云数据基本能满足平原1∶500比例尺的制图精度要求(≤0.15 m)。此外,无人机影像DEM较RTK测量DEM的误差分布规律为:距积水区越远,地表植被覆盖度越低,成图精度越高,距水域最远的非积水区内,地表为裸土,其误差分布在0~0.15 m,占整体的41.22%;在稀疏植被覆盖的季节性积水区内,误差分布上升到0.15~0.30 m,占整体的35.7%;而在茂盛植被覆盖的季节性积水区内,误差分布为0.3~0.55 m,占整体的20%,其原因主要是由于低空无人机摄影测量获取了植被顶部的高程信息,而实际测量的是植被根部的地表高程所致。此方法在植被覆盖区的测图精度不足,在今后采煤塌陷地测绘中,可考虑提前对沉陷地内的植被种类、高度和分布面积等信息做好调查工作,以便在后期影像处理过程中,利用该信息加工影像DSM,去除植被高度信息影响的同时,提高制图精度和节约成本。
3 结论
本文采用无人机采集研究区的航空影像,经Pix4Dmapper Pro软件生成了具备地理信息的正射影像和地面采样距离为0.05 m高清DTM,并结合地面RTK测量数据生成的DEM,对影像生成的DEM进行了误差分析和精度评定,研究结果如下:
(1)在高潜水位采煤塌陷地应用中,利用无人机测绘平面制图精度可满足矿区大比例尺的要求,在无植被覆盖区总体能满足1∶1000比例尺及以上的成图精度要求。
(2)针对高潜水位矿区而言,不同于其它地区地形测绘的特征是,采煤沉陷形成的盆地及其边缘湿地的植被覆盖对高程精度的影响显著,未来获取高精度的地形数据需要提前对植被覆盖度高的区域做好前提调查工作或采用滤波方法去除植被影响。
猜你喜欢
科学技术创新(2022年30期)2022-10-21
河北地质(2022年2期)2022-08-22
资源信息与工程(2021年5期)2022-01-15
中国生殖健康(2020年2期)2021-01-18
当代陕西(2020年23期)2021-01-07
科学大众(2020年17期)2020-10-27
小太阳画报(2019年11期)2019-12-06
中国生殖健康(2018年2期)2018-11-06
消费导刊(2017年8期)2018-01-18
中国公路(2017年11期)2017-07-31
