厦门CORS基准站稳定性分析
2018-07-23 00:52:18谢继香雷海智张洪银
测绘工程 2018年7期
谢继香,雷海智,张洪银
(1.青海省水文地质及地热地质重点实验室,青海 西宁 810008;2.青海省水文地质工程地质环境地质调查院,青海 西宁 810008)
厦门市位于北东向长乐—诏安深大断裂带与东西向南靖—厦门断裂带交接部位。区域构造位置属于“闽东燕山断坳带”、“闽东南沿海变质带”的组成部分[1]。利用厦门境内的CORS基准站长时间监测地表位移,能够有助于探索区域地壳运动情况。
CORS系统可定义为将基准站网通过网络互联,构成以提供位置和时间信息为核心的网络化综合服务系统。本文采用GAMIT/GLOBK[2-3]软件计算厦门CORS基准站2013-2015年间GPS观测数据,分析时间序列的噪声模型和周期特性,获得较为干净的GPS速度场,这对更好地评价厦门区域CORS基准站的稳定性,保障厦门市现代大地坐标框架的时效性有重要意义。
1 数据处理
采用麻省理工学院(MIT)、斯克里普斯海洋研究所(SIO)研制的GAMIT/GLOBK 10.5软件对基线进行解算,选取中国境内及周边的21个IGS站(aira、artu、bako、bjfs、daej guam、hyde、iisc、irkt、kit3、lhaz、nril、ntus、pimo、pol2、shao、tnml、ulab、urum、 wuhn、yakt)作为约束(水平方向0.025 m,垂直方向0.050 m)于ITRF08框架[4-5]。
GAMIT基线解算策略见表1,加入月球历表(luntab.)、太阳历表(soltab.)、章动表(nuttab.)、地球自转表(UT1.)、海洋潮汐(grid.oct)、对流层延迟(vmf1.grd)、闰秒(leap.sec)、天线相位中心改正。以此,最大程度地修正日、月潮引力极潮(pole tide)、固体潮(solid tide)及海潮(ocean tide)对观测GPS站点造成的影响。另外,解算过程中进行卫星轨道模型、大气压模型、水汽分布模型、多路径效应、天线相位中心等改正。

表1 GAMIT解算模型和参数设置
利用GAMIT/GLOBK软件计算厦门区域内的6个GPS连续观测站2013—2015年数据,获得多年的连续时间序列资料,解算策略如表1所示。对于GPS时间序列资料的分析,通常需要考虑长期的周期运动、同震变形以及震后变形。GPS单站、单分量坐标序列用非线性模型表示[6]为
y(ti)=a+bti+csin(2πti)+
dcos(2πti)+esin(4πti)+fcos(4πti)+
(1)
式中:ti是以年为单位;系数a,b分别代表地壳位置和线性变换率;系数c,d,e,f描述周年和半周年运动振幅;系数gj代表地震造成的同震位移;系数hj表示震后地壳运动速度的改变量;系数kj描述震后变形呈指数衰减的现象;H(t)为阶跃函数(Heaviside step function);τj为松弛时间;vi为残差。
当vi与时间无关(高斯白噪声),也就是期望E(vi)=0时,式(1)可以利用最小二乘求解各个参数,获得测站速度及其中误差。然而,大量研究发现,GPS时间序列残差并非随机过程,不能通过大量观测资料消减误差影响。
2 噪声分析
GPS时间序列存在噪声来源,如季节性的降雨造成土壤膨胀收缩,进而使测站点位不稳定;另外GPS资料求解时引入了不正确或者不完善的卫星轨道模型、大气模型或天线相位中心的校正不准确等。
对GPS时间序列进行噪声分析主要有两个目的:①为估计合理的GPS误差,若GPS时间序列内含有与时间相关的噪声,则以高斯分布为基础的最小二乘所估计的速度场误差将会被低估;②为了解不同类型的布点方式对GPS长期观测造成的影响。
原始时间序列扣除拟合值后的噪声时间序列,可以用频谱定性分析噪声的类型。频谱分析是一种在频率域上分析信号的方法。噪声时间序列在频谱域上的功率谱可以使用power law的形式表示[7-10]为
(2)
式中:f是频率;P0和f0是常数;k是谱指数,通常为介于-3到1之间的任意实数,其中整数k代表一些特殊的噪声类型:k=0时是标准的白噪声(white noise,WN)、k=-1时是标准的闪烁噪声(flicker noise,FN)、而k=-2时则是标准的随机漫步噪声(random walk noise,RWN)。另外,除了标准的白噪声以外,其余的部分统称为有色噪声。
计算发现6个站点的三分量噪声的谱指数k介于-0.6~0之间,可以判断“白噪声+闪烁噪声”(“WN+FN”)是最佳噪声模型。图1中可以看出,频率为1和2时,存在明显突起,这说明数据中存在周期为1年和半年的周期波动。确定了最佳噪声模型以后,本文采用CATS(Create and Analyse Time Series)软件对厦门CORS连续站数据进行噪声分析。
CATS软件是由Williams[5]开发的一个独立的C程序,是比较连续GPS坐标时间序列中的随机噪声过程的软件,是以命令行计算参数,数据输入以文件形式,具体的格式与说明参考安装目录下的用户手册。
使用--sinusoid来控制求取年周期和半年周期。使用-sinusoid 1y求解年正弦曲线;使用-sinusoid 1y1求解年和半年正弦曲线。其他更详细的控制参数可以参见CATS的使用者操作手册。
为了比较噪声模型对分析结果的影响,CATS软件分别对同一批资料进行WN模型分析和“WN+FN”模型分析, GPS连续观测数据在时间序列分析的过程中,最常被考虑到的通常是地震相关的修正模型参数与长周期的变动。例如同震造成的时间序列不连续,震后的异常活动,更或是季节性的变化等等[11]。但最基本的就是测站的线性变化,也就是速度项。因此以速度项的模型结果,作为探讨比较的重点。
例如:
cats --model pl:k-1 --model wh: --columns 7 --sinusoid 1y1 --verbose --output fn_wn.KKN4 KKN4_CATS.neu
cats --model wh: --columns 7 --sinusoid 1y1 --verbose --output wn.KKN4 KKN4_CATS.neu

图1 XMJM的功率谱图,谱指数介于-1~0之间
表2列出时间序列分析后部分测站之东西、南北、与垂直三分量的速度值,其中每一测站横栏中上方为经过噪声模型“全频等幅杂波+闪变杂波”( “WN+FN”)处理分析的结果,下方则没有经过噪声模型分析(WN)。结果指出,没有使用噪声处理,模型参数的误差将明显被低估[6]。其中位于误差后面的常数是两者误差的倍数,平均而言,经过噪声处理后的模型误差在东西、南北和垂直方向约为原本的6.7、5.9和6.0倍。换言之,若未有考虑时间序列中时间相关的噪声,误差将被低估约6倍左右。厦门境内连续GPS站点分布在ITRF08框架下2013—2015年间速度场绘制于图2,左边是水平速度场,右边是垂直速度场。
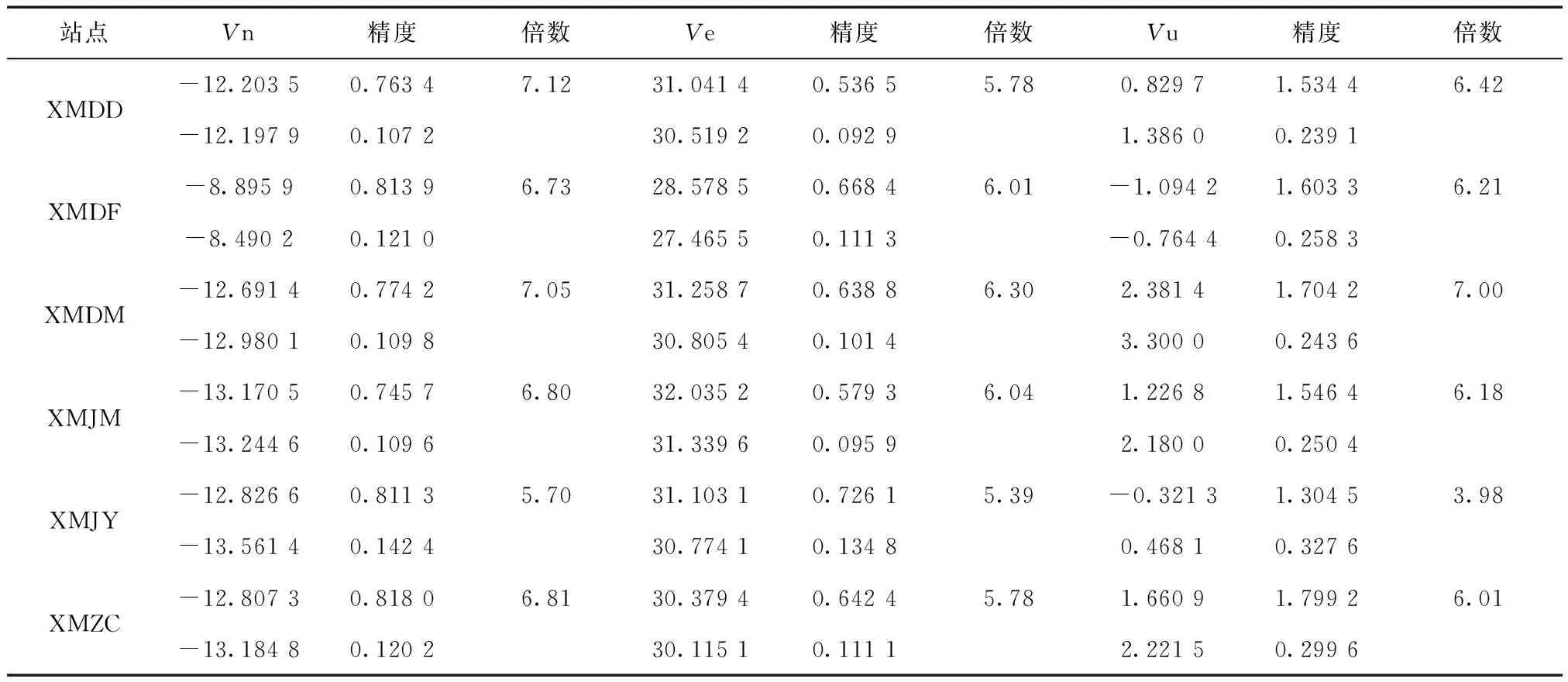
表2 时间序列分析结果,测站的东西、南北、垂直三分量的速度值及误差 mm
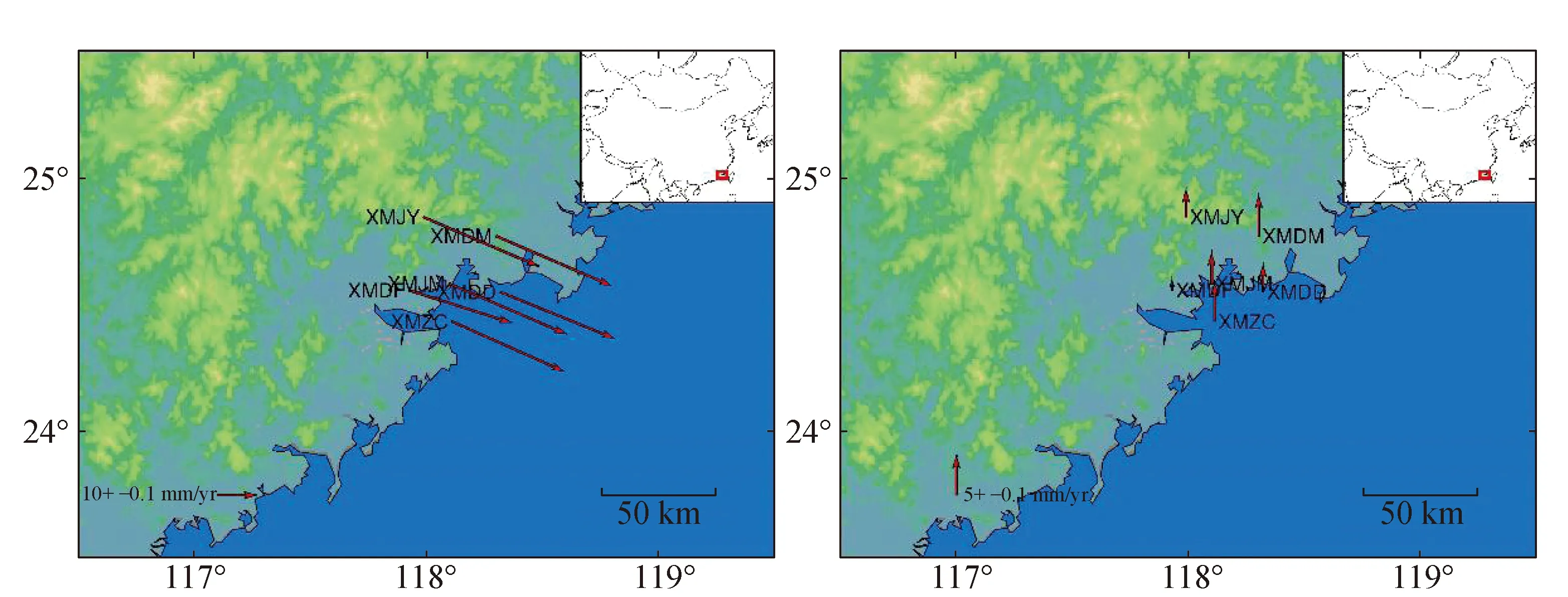
图2 厦门境内连续GPS站点分布和ITRF08框架下2013-015年间速度场
3 结束语
本文利用GAMIT/GLOBK软件对2013—2015年厦门地区3年连续观测的GPS数据进行解算并对时间序列进行噪声分析。结果表明,厦门境内连续站的最佳噪声模型是“WN+FN”,若未考虑时间序列中时间相关的噪声,速度场估算误差将被低估6~7倍。本文最后获得厦门地区的精确GPS速度场模型,研究结果有助于了解厦门区域构造及地壳形变,并对区域坐标框架维护有重要作用。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
中国自行车(2022年6期)2022-10-29 02:05:40
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
海峡姐妹(2018年12期)2018-12-23 02:38:50
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
海峡姐妹(2017年6期)2017-06-24 09:37:36
商业文化(2017年23期)2017-04-23 05:12:54
噪声与振动控制(2015年4期)2015-01-01 07:08:05