
基于载波相位差分技术的东南极冰川移动监测系统与应用
2018-07-23 02:22窦若凡窦银科周云霄席晓琴马春燕
太原理工大学学报 2018年4期
窦若凡,窦银科,周云霄,席晓琴,马春燕,陈 燕
(太原理工大学 电气与动力工程学院,太原 030024)
南极拥有世界上最大的冰储量,而南极冰盖任何微小的变化都可能引起全球海平面的巨大变化[1-2]。SOLOMON et al的研究表明20世纪以来全球海平面进入了逐渐上升的阶段,其中影响海平面上升的主要原因就是两极冰量的变化。在过去50年间,全球平均气温已经升高了[3],全球变暖造成的冰架融化和陆地冰运动入海是造成海平面上升的主要输入量,而冰川是反应气候变化最敏感的自然指标之一[4-5]。所以对冰川的运动与其物质平衡的监测就显得尤为重要。
1 南极冰川监测与RTK技术的研究动态
南极地处偏远,长期处于高纬度的低温环境中且人迹罕至,所以对南极冰盖进行监测时的电源、通讯、维护等要求非常苛刻,因此一般的监测手段无法保证对冰川运动的长期、实时监测。目前对冰川的监测主要为遥感监测,如利用航空或卫星影像,尤其是对合成孔径雷达(SAR)的应用与研究较多,研究方法主要采用目视解译的信息提取法和计算机辅助分类法[6]。RIGNOT et al采用数字镶嵌(digital mosaic)技术,研究首次给出了南极大陆高分辨率的、完整的冰川移动图像,给冰川动力学的研究提出了新的见解[7]。COOK et al结合航空影像与Landsat数据得出了时间尺度长达61 a的南极半岛及其周边岛屿244条海冰冰川的运动结果,数据表明87%的冰川存在退缩现象并与气候变暖指示出的结果相同[8]。郑茜等人通过亚像元级的图像匹配技术处理了Landsat-8影像数据,得到了西昆仑山地区两条冰川的位移和速度场[9]。YAN et al使用高精度像素跟踪法(pixel-tracking)结合相控阵L波段合成孔径雷达图像,监测了西昆仑山东侧的高山冰的冰川运动,结果显示地形的高程与表面冰速呈正相关关系[10]。但是这种采用遥感测量冰川运动的方法无法达到对冰川连续实时的自动化监测,并且测量成本较大,容易受到天气和地形因素的影响[11]。
在采用GPS测量冰川运动中,艾松涛等人在北极冰川建立的GPS跟踪站获取了北极冰川水平以及垂直方向上的变化[12]。在地表下沉测量中,应用RTK技术能够对地面的变形、移动量进行及时的解算,可以达到对危险的及时预测[13]。RTK技术在高压输点线路的选线设计中也起到了缓解作业压力、降低测图难度的作用[14]。目前对RTK技术的研究主要为定位精度和定位方法的研究,高旺等人提出了基于北斗三频宽巷组合的网络RTK单历元定位方法,将误差平面缩小到3~4 cm[15]。综上,RTK测量技术在极地冰川的监测中还鲜有应用,但由于其优异的性能以及南极地处开阔、搜星质量较高,非常适合作为冰川长期观测的手段。
目前我国对于冰川移动的研究大多集中于国内冰川,对南极冰川移动的研究仍不多。本文基于RTK技术设计的冰川监测站可以连续、长时间地对所处冰川进行自动化监测,实时将冰川移动数据传回国内,有较大的实际意义。
2 RTK技术监测冰川移动的原理
2.1 RTK测量基本原理
RTK(real time kinematic)技术是GPS应用的一个新突破其原理图如图1所示,它是以载波相位观测值为根据的实时差分测量技术,其主要优点有:作业效率高,定位精度高,无误差积累,可以实现全天候测量[10]。由于其优异的的性能,RTK技术在诸多测量领域都有广泛的应用前景。
RTK测量方法主要有伪距法和载波相位法。由于伪距法计算精度无法满足对南极缓慢移动的冰川的有效监测,本文采用载波相位差分GPS定位法,其定位精度可达厘米级。载波相位测量的主要技术为利用快速动态逼近法计算出系统整周未知数即可进行实时定位,只要基站与移动站可以同时观测四颗以上卫星就能够随时给出移动站的高精度坐标信息[16]。
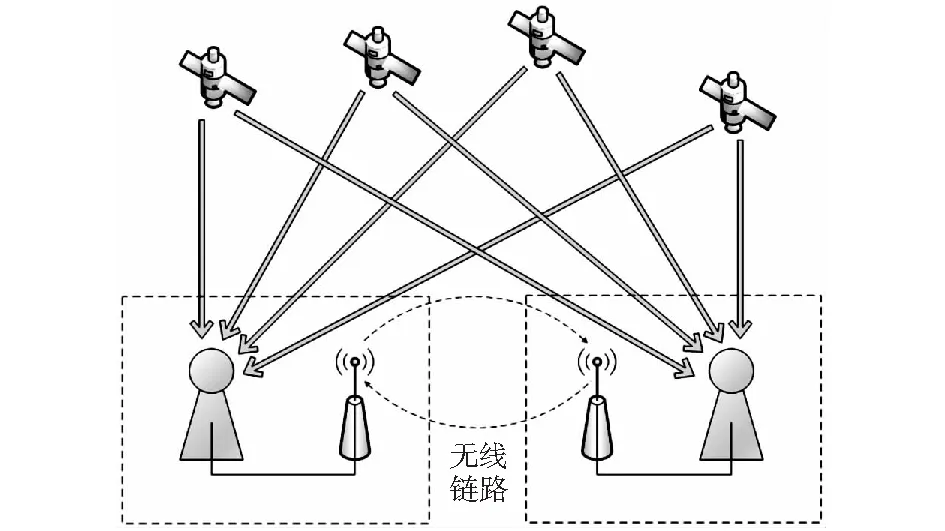
图1 RTK原理示意图Fig.1 RTK schematic diagram
采用差分载波相位法实时计算移动站的位置公式如下:

(1)
2.2 冰川监测系统的构成与工作原理
本研究采用的RTK算法实现模块为Hemisphere生产的P103板卡,可以实现60 cm的差分定位精度并能够胜任低温状态下的工作条件,符合南极现场的恶劣环境。RTK监测系统主控单元采用MSP430单片机,其主要功能为控制RTK板卡的上电;基站单片机还有控制基站发送基线向量数据的频率,和通过控制铱星模块将采集到的差分数据传回数据的功能。为了保证系统的长期运行,系统程序设计采用中断的工作方式以减少功耗。在一次完整的数据采集中,基站和移动站不单要采集自身位置信息,更要将信息进行互传来达到差分定位的目的;所以就要对基站和移动站的上电时间进行统一。
图2为RTK监测系统原理图。本研究采用的RTK测量系统是由两台GPS接收机(基站、移动站)与一套数据链构成。基站安装在中山站附近地处开阔、搜星质量高的地区,以保证数据传输的稳定性以及定位的精度。移动站安装在内陆队出发基地附近冰盖,通过基站和移动站的互相通讯获得测点的实时定位信息。
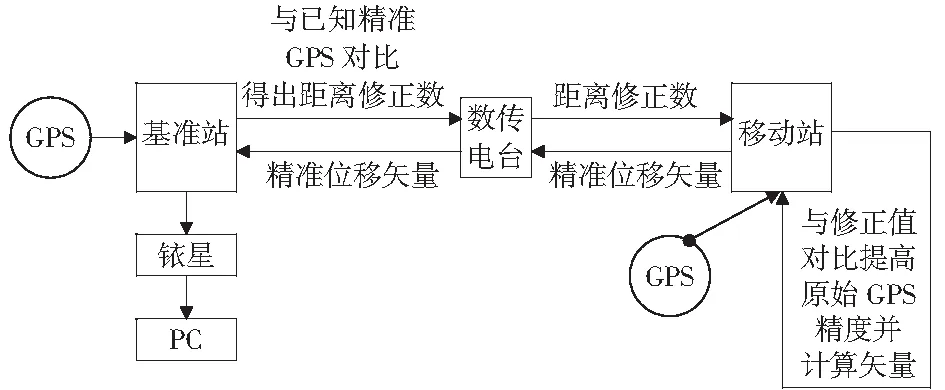
图2 RTK定位工作原理Fig.2 RTK positioning schematic
在进行定位时基准站首先采集基站位置信息,然后通过电台链路将数据传输给移动站;移动站将基站GPS与移动站GPS信息进行差分处理,解算出两站之间的基线值,采用坐标转换和参数投影的方法得到精确的移动站坐标信息并通过电台传输回基站;基站配备铱星远程传输装置,可以将数据实时发送回事先设置好的邮箱内。
3 研究区域与监测系统基本情况
由于本文设计的RTK冰川移动监测系统针对的研究区域为南极中山站附近冰川,该地区具有温度低、环境恶劣、通讯不便等特点,根据研究团队在国内试验中对RTK测量的定位方法与定位精度的解算,设置RTK无人监测站可以有效实时地对该地区冰川移动的速度和位移进行观测[17]。图3为2016年2月26日在东南极中山站附近安装的一对一冰川监测系统基站与移动站信息导入Google Earth后的显示图像。该地区年平均风速7.0~9.2 m/s,基站平均海拔5.7 m,移动站平均海拔215.1 m.

图3 冰川监测站安装位置Fig.3 Glacier monitoring station location map
A点为基站,安装在中山站南侧高地天线阵附近以保证搜星信号稳定;B点为移动站位于南极内陆考察队出发基地附近冰盖上。基站与移动站相距6.1 km,满足电台数据传输距离。无人监测站能源由12 V铅酸蓄电池提供并架设小型光伏发电装置提高续航能力。理论上可以长期自主运行1 a以上。RTK无人监测站在南极实际应用环境如图4所示。
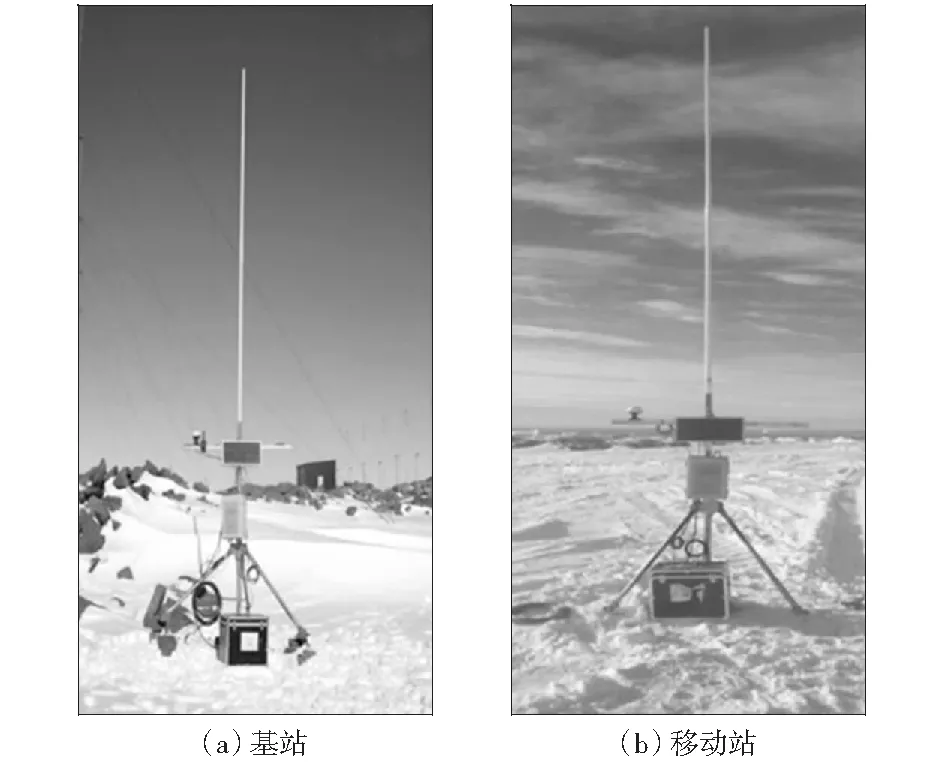
图4 RTK监测设备在南极现场Fig.4 RTK monitoring station in Antarctic ice sheet
监测站整体设计以三角支架为基础,用以抵抗南极低温强风等恶劣环境。基站与移动站主要由4个部分构成——整体支架、供电模块(电池箱)、光伏发电模块与主控制箱。系统采用中断的工作方式,每天以北京时间9:06与15:06发送2次RTK数据来达到节约能耗的目的。
4 冰川移动数据处理
本监测系统设计中RTK计算部分在移动站P103板卡中进行,返回基站的数据直接为移动站经过差分计算后的数据。基站铱星每次发送数据量大小为102 B,数据格式如图5所示。

508N3751.5677031E11231.0584137804.564070603117715⁃10⁃1015:06↑↑↑↑↑↑↑定位质量搜星数差分后移动站经纬度高程GPS数据采集时间供电电压数据接收时间
图5数据格式
Fig.5 Data format
截至目前,本研究中使用的数据来源于团队自主设计的RTK冰川移动无人监测站,选取2016年2月28日至2017年2月12日的数据进行分析。由于监测时间短,且冰川移动速度缓慢,本文忽略高程造成的影响,将每月数据进行汇总、滤波,剔除不可靠数据。绘制出的冰川移动轨迹如图6所示。

图6 20160228-20170212期间每月平均冰川移动轨迹Fig.6 20160228-20170212 monthly average glacier movement trajectory
由于测点北部近海地点有丘陵、岩石的阻挡,降低了北向的冰盖移动速度,而西侧在Amery冰架附近主要冰流的连带影响下,可以看出该地区冰川在一年的监测时间内整体向西北方向移动13.9 m,有明显向海岸缓慢移动的趋势。表1为月平均移动距离汇总。

表1 冰川月平均移动距离Table 1 Monthly moving distance of glacier m
全年内冰川月平均移动速度为1.402 m/月。由于2月监测时间较短,故不在统计范围内。南极夏季为12月至1月、秋季2月至3月、冬季4月至9月、春季10月至11月,夏季短暂而冬季漫长。由表1计算出:冬季平均每月移动距离为1.325 m;夏季月平均移动距离为1.552 m,相比冬季每月平均移动速度快约17.1%.该分析结果与SCAMBOS et al在南极半岛得出的结果相同[18];与周春霞等在东南极极地记录冰川中计算的数据相近——冬季较夏季冰速减慢约19%[19].造成季节差异的主要因素可能是由于夏季表面有一定的融水产生,融水沿裂缝渗透后造成冰盖内部基础应力降低,从而加速了冰盖的移动。
5 结论
本研究采用RTK技术对南极内陆出发基地附近的冰盖移动进行了时间尺度上的分析,实时动态差分技术可以在南极现场实现对冰川的长期实时监测且受到的干扰较少,相比合成孔径雷达法成本较低,是对冰川实现无人监测的理想手段。通过分析处理2016年2月28日至2017年2月12日的数据,将移动站的移动轨迹以图像的方法表示出来,该测点在近1 a期间向西北方向移动约13.9 m,且冬季移动速度相比夏季慢约17.1%.
本文所测得的冰川移动为某一测点的平均移动值,而一个区域内冰川的移动可能会受到几条冰流同时影响,整体在移动位移上并不绝对相同;且本研究的区域较小,无法对各个区域冰川移动速度、轨迹作出对比。后续研究将采用更加全面可信的研究方法,采用一套基站对应多套移动站的研究方法对东南极大范围内冰川的移动进行跟踪。另外结合地形、高程和内部等时层数据等,进一步探讨冰川的运动与物理特性。
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
小天使·四年级语数英综合(2020年2期)2020-02-04
理财·市场版(2019年5期)2019-09-10
创新作文(1-2年级)(2019年2期)2019-08-06
中国粮食经济(2018年8期)2018-01-01
中国环境监察(2017年5期)2017-10-23
中国环境监察(2017年5期)2017-10-23
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
