北斗/GNSS实时动态差分技术的实验教学解析
2018-07-21 01:14:32李克昭石俊鹏牛海鹏马素霞
测绘工程 2018年8期
李克昭,石俊鹏,牛海鹏 ,马素霞
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454000;2. 北斗导航应用技术协同创新中心,河南 郑州 450052)
在光学测角、激光测距,甚至是全站仪测绘时代,都需要满足测站间的通视条件,前后站、测站至少需要4名测绘人员共同作业,存在作业效率低,劳动强度高的缺陷。GPS的出现,给测绘行业带来了翻天覆地的变化[1,2]。随着载波相位整周未知数快速求解技术和通信技术的快速发展,将基准站的观测数据及相关信息实时传输到移动台,移动台实时地进行载波相位差分处理,通常称为RTK(Real Time Kinematic)技术[3]。单个基准站覆盖的范围仅有20km左右[4]。网络技术的发展,为多基准站资源共享的RTK模式提供了技术支撑[5]。现行的网络RTK技术主要有虚拟参考站技术(VRS,Virtual Reference Station)[6]、区域改正数(FKP,德语:Flächen Korrektur Parameter,即Area Correction Parameter)技术[7,8]和主副站技术(MAC,Master-auxiliary Concept)[9-10]。北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)、Galileo系统的建设与全球运行,为实时动态差分技术的进一步发展与应用注入了活力。但不管是常规北斗/GNSS RTK,还是网络北斗/GNSS RTK技术,其基本工作原理都是载波相位动态差分原理,其关键技术都是获取基准站(或)CORS站与移动台之间的高精度基线向量。以下从导线测量的坐标增量与北斗/GNSS RTK基线向量的异同,以及二者坐标推算的特点和坐标转换问题入手,深入浅出地解析RTK关键技术。
1 北斗/GNSS RTK载波相位差分技术的基线向量与导线测量的坐标增量差异
传统的导线测量是通过测距、测角,并结合方位角的推算,得到两点间的坐标增量。图1给出了1条附合导线的测量示意图。
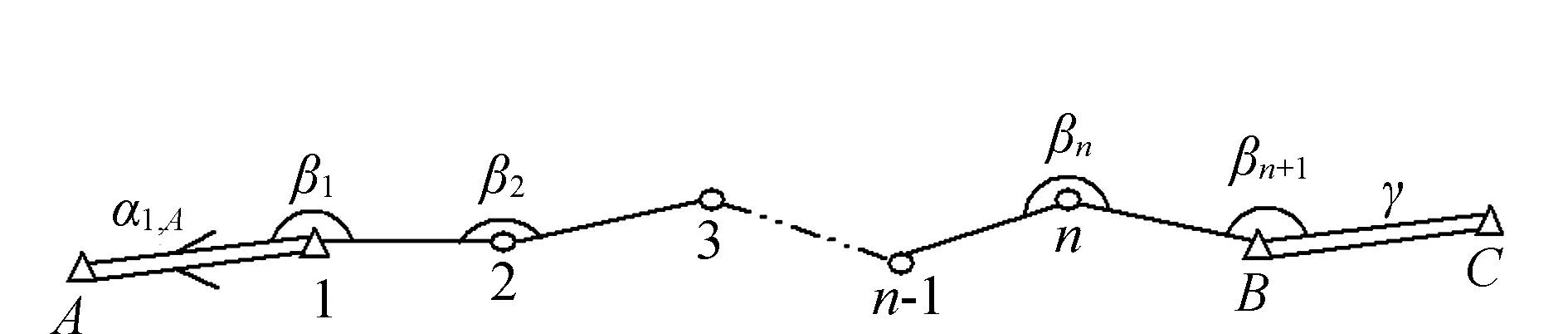
图1 附合导线测量示意图
如图1所示,可通过已知点A、1的坐标计算出起算方位角α1,A,
(1)
其它导线边的概略方位角可推算如下:
(2)
根据已知点B、C反算的方位角计算角度闭合差,如角度闭合差符合限差要求,修正观测角βi(i=1,2,…,n+1),之后,进一步推算各导线边的方位角,并根据式(3)计算概略坐标增量。
(3)
式中:Si,i+1为导线边长。
计算B点的概略坐标,与其已知坐标求差得到坐标增量闭合差,判定精度是否满足导线测量精度要求。符合精度要求后,分配闭合差后,进一步修正坐标增量,最后,根据修正后的坐标增量推算各点的坐标。
而北斗/GNSS RTK测量技术是通过基准站与移动台的载波相位同步观测值之间求差,消除或削弱相关误差,构建新的虚拟观测方程,通过平差解算,得到两点之间基线向量。如图2所示,1号点设置基准站,2,3,…,n-1,n为移动台观测点。

图2 北斗/GNSS RTK测量示意图
根据北斗/GNSS理论,1号点的载波相位观测方程为
(4)
类似地,可写出t观测历元2,3,…,n-1,n号点的载波相位观测方程
(5)
(6)
(i=2,3,4,5,6),
(7)
(8)
在相同历元和相同观测卫星条件下,上述载波相位观测方程分别与基准站1号点的载波相位观测方程进行测站之间求单差,得到虚拟观测方程。在基准站与移动站相距较近时,求差后电离层、对流层的延迟误差可以忽略不计。各个点相对基准站的虚拟观测方程可表示如下:
(i=1,2,3,4,5),
(9)
(i=1,2,3,4,5),
(10)
(i=2,3,4,5,6),
(11)
(i=2,3,4,5,6).
(12)

在导线测量中,当坐标增量确定后,导线点之间的相对位置关系也就确定了。类似地,在北斗/GNSS RTK测量中,当基线向量确定后,各测量点相对于基准站的位置,以及各测量点之间的相对位置也就确定了。不同之处在于导线测量的坐标增量是二维的、平面的,RTK的基线向量是三维的、立体的。
2 北斗/GNSS RTK基准站起算坐标的获取与坐标转换参数的配置
2.1 北斗/GNSS RTK基准站起算坐标的获取
对于导线测量而言,在获得坐标增量后,从起算点开始,后一个点的坐标等于前一个点的坐标加上该两点间的坐标增量,逐次递推而得。而对北斗/GNSS RTK而言,在获得移动台测站点相对于基准站的基线向量后,结合图2,移动台的测量坐标为
(13)
1)以基准站的已知坐标作为起算坐标。该坐标一般为北斗/GNSS静态控制测量的平差计算结果,也可以是导线测量、三角网测量或其他联合测量平差方式综合处理的坐标结果。
2)以基准站接收机的实时伪距定位结果作为起算坐标。在北斗/GNSS RTK的电子手薄软件中,设置基准站时,通常采用10次伪距平滑的方式获得基准站的起算坐标。
3)对于网络北斗/GNSS RTK,其基准站是CORS(Continuously Operating Reference Stations)站,当北斗/GNSS RTK电子手薄软件与CORS系统连接后,RTK系统在接收CORS站载波相位观测值的同时,还接收其概略坐标,作为北斗/GNSS RTK测量的起算坐标。
2.2 北斗/GNSS RTK坐标转换参数的配置
相对导线测量,北斗/GNSS RTK较难理解之处在于其坐标转换的问题。如GPS的测量成果是WGS-84坐标系的,而我国用户所需成果通常在北京54、西安80或者地方独立坐标系下,这就需要进行坐标成果转换。
通常北斗/GNSS RTK电子手薄的坐标参数计算与设置有2种方法:
1)根据测区的3个或3个以上公共已知点的两套坐标计算获得坐标转换参数。这种方法常与上述的以基准站已知坐标作为起算坐标法相配套。坐标参数的计算可通过式(4)计算:
(14)
2)点校正法配置坐标参数。已知3个或3个以上控制点的用户坐标系坐标,在利用上述2.1中基准站起算坐标的获取2)、3)方法设置基准站坐标信息后,北斗/GNSS RTK移动台到3个或3个以上控制点上进行测量,获得其卫星测量坐标系下的坐标,然后调用北斗/GNSS RTK电子手簿的参数计算功能,获得该测量坐标系与用户坐标系之间的坐标转换参数。
说明:以GPS接收机为例,这里所提的卫星测量坐标系可以理解是在WGS-84椭球框架下的一种独立坐标系;上述2.1中2)、3)方法,每获得基准站的一个起算坐标,就等价于定义了一个WGS-84椭球框架下的独立坐标系。北斗/GNSS RTK测量时,首先是在该卫星坐标系下获得一个测量结果,然后,再根据所设置的坐标参数给出坐标转换后的结果,即用户坐标系下的成果。
3 实例与数据分析
为了进一步加深对北斗/GNSS RTK技术的理解,设计实验:以莱卡TS02全站仪(测角2 s,测距2 mm+2 ppm)按照三级导线测量技术要求,进行附合导线测量(如图3所示),以测量结果作为验证RTK测量的基准,导线待定点测量处理结果见表1所示。
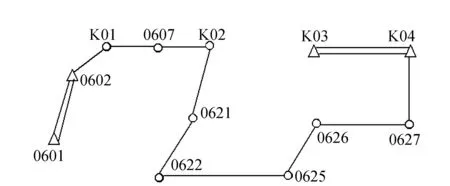
图3 附合导线实验示意图
针对以上导线待定点,利用中海达V30 GNSS接收机,进行3种RTK测量方法验证:
方法1:已知点设置基准站,起算坐标采用已知点坐标,坐标转换参数采用已知点测量坐标系与用户坐标系对应的转换参数;
方法2:任意点设置基准站,起算坐标采用基准站的伪距10次平滑结果,坐标转换参数采用点校正法获得;
方法3:网络RTK法,起算坐标采用CORS站发送的基准站概略坐标,坐标转换参数采用点校正法获得。
测量结果分别见表2—表4。

表1 导线待定点测量处理结果 m

表2 RTK方法1测量结果 m

表3 RTK方法2测量结果 m

表4 RTK方法3测量结果 m
3种RTK方法测量结果与导线测量的点位较差结果见图4所示。

图4 3种RTK测量方法与导线测量的较差
从图4可见,3种RTK测量方法与三级导线的测量结果较差都在cm级,因此,说明3种RTK测量的基准站设置、转换参数配置都是正确的。
4 结束语
论文从测绘工作者熟悉的导线测量入手,比较了导线测量的坐标增量与北斗/GNSS RTK测量的基线向量的异同,分析了导线与北斗/GNSS RTK测量坐标推算的异同,阐释了北斗/GNSS RTK坐标推算的起算坐标选取与坐标转换参数配置问题;最后,以三级导线测量为比较基准,进行了3种GPS RTK测量方法的验证。验证结果表明,以已知点或任意点设置基准站的常规北斗/GNSS RTK方法,或网络北斗/GNSS RTK方法,都可以获得cm级的测设结果。
[1] 杨元喜.北斗卫星导航系统的进展、贡献与挑战[J],测绘学报, 2010 (1):1-6.
[2] 张睿,杨元喜,张勤,等.BDS/GPS联合定轨的贡献分析[J], 武汉大学学报(信息科学版), 2017(5): 600-608.
[3] 李克昭, 杨力, 柴霖,等. GNSS定位原理[M].北京:煤炭工业出版社, 2014: 185-195.
[4] Mustafa Berber, Niyazi Arslan. Network RTK: A case study in Florida [J]. Measurement, 2013, 46(2013): 2798-2806.
[5] 梁霄, 杨玲, 黄涛,等. 网络RTK基准站间的模糊度及空间相关误差解算[J]. 测绘工程, 2016, 25(1): 24-28.
[6] 黄丁发, 周乐韬, 刘经南,等. 基于Internet的VRS/RTK定位算法模型及实验研究[J]. 武汉大学学报(信息科学版), 2007, 32(3): 220-225.
[7] 祝会忠, 徐爱功, 高星伟,等. 长距离GNSS网络RTK算法研究[J]. 测绘科学, 2014, 39(5): 80-83.
[8] ZHANG Liang, LV Hanfeng, WANG Dingjie etc. Asynchronous RTK precise DGNSS positioning method for deriving a low-latency high-rate output [J]. J Geod, 89:641-653.
[9] 姚宜斌, 胡明贤, 许超钤. 基于DREAMNET的GPS/BDS/GLONASS多系统网络RTK定位性能分析[J]. 测绘学报, 2016, 45(9): 1009-1017.
[10] FENG Yanming, GU Shengfeng, SHI Chuang, et al. A reference station-based GNSS computing mode to support unified precise point positioning and real-time kinematic services [J]. J Geod, 2013, 87:945-960.
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
电信科学(2016年9期)2016-06-15 20:27:25
公民与法治(2016年19期)2016-05-17 04:18:15
西部广播电视(2015年10期)2016-01-18 04:01:45
读者·校园版(2015年7期)2015-05-14 13:11:40
电子设计工程(2015年16期)2015-02-27 12:07:58
电测与仪表(2014年15期)2014-04-04 12:05:32
河南科技(2014年15期)2014-02-27 14:12:35
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49